TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024152405
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023066587
出願日
2023-04-14
発明の名称
搬送対象物の搬送方法
出願人
株式会社カネカ
代理人
弁理士法人アスフィ国際特許事務所
主分類
B65G
59/04 20060101AFI20241018BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】搬送対象物が容器内に配置されている場合のように、搬送対象物よりも上に存在している空間が比較的狭い場合であっても、吸着ハンドの吸着部材で搬送対象物を搬送しやすくすることができる搬送対象物の搬送方法を提供する。
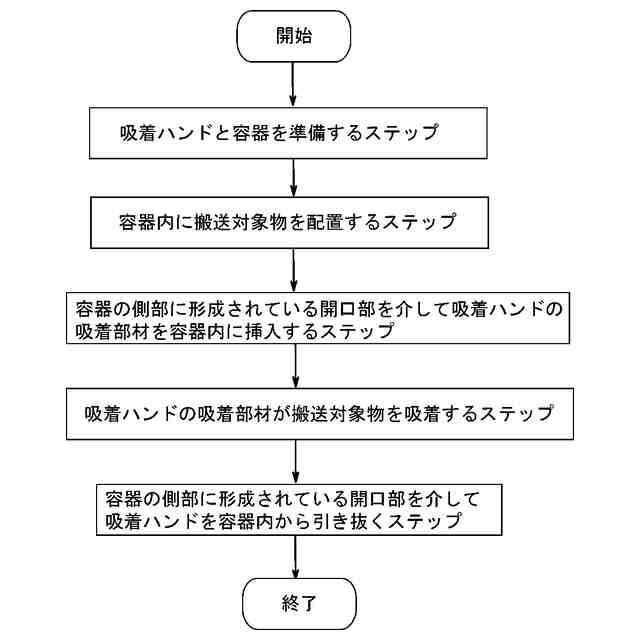
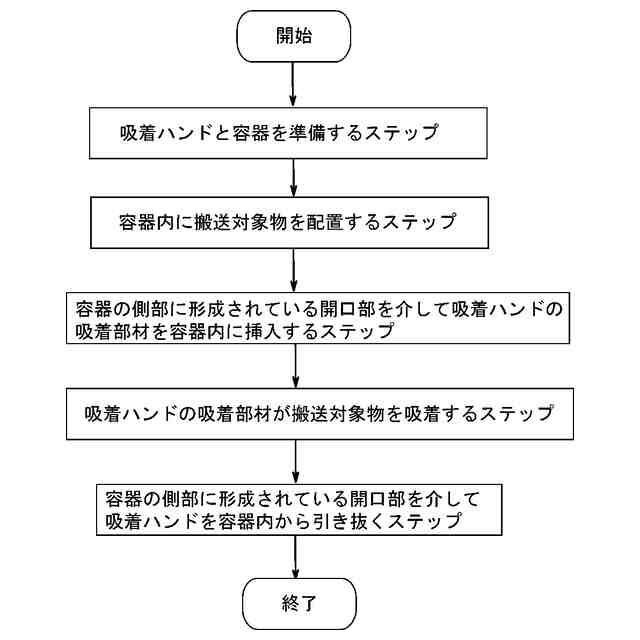
【解決手段】搬送対象物を吸着する吸着部材を有している吸着ハンドを準備するステップと、底部と側部を有し、側部に開口部が形成されている容器を準備するステップと、容器内に搬送対象物を配置するステップと、容器の側部に形成されている開口部を介して吸着ハンドの吸着部材を容器内に挿入するステップと、吸着ハンドの吸着部材が搬送対象物を吸着するステップと、容器の側部に形成されている開口部を介して吸着ハンドを容器内から引き抜くステップと、を有する搬送対象物の搬送方法。
【選択図】図5
特許請求の範囲
【請求項1】
搬送対象物を吸着する吸着部材を有している吸着ハンドを準備するステップと、
底部と側部を有し、前記側部に開口部が形成されている容器を準備するステップと、
前記容器内に前記搬送対象物を配置するステップと、
前記容器の側部に形成されている開口部を介して前記吸着ハンドの吸着部材を前記容器内に挿入するステップと、
前記吸着ハンドの吸着部材が前記搬送対象物を吸着するステップと、
前記容器の側部に形成されている開口部を介して前記吸着ハンドを前記容器内から引き抜くステップと、
を有する搬送対象物の搬送方法。
続きを表示(約 910 文字)
【請求項2】
前記容器の側部に形成されている開口部を介して前記吸着ハンドの吸着部材を前記容器内に挿入するステップにおいて、前記吸着ハンドを水平方向に移動させることによって前記吸着ハンドの吸着部材を前記容器内に挿入する請求項1に記載の搬送対象物の搬送方法。
【請求項3】
前記容器の側部に形成されている開口部を介して前記吸着ハンドを前記容器内から引き抜くステップにおいて、前記吸着ハンドを水平方向に移動させることによって前記吸着ハンドを前記容器内から引き抜く請求項1または2に記載の搬送対象物の搬送方法。
【請求項4】
前記容器内に前記搬送対象物を配置するステップにおいて、複数の前記搬送対象物が一定の方向に積層される請求項1または2に記載の搬送対象物の搬送方法。
【請求項5】
前記一定の方向は鉛直方向である請求項4に記載の搬送対象物の搬送方法。
【請求項6】
前記吸着ハンドは、前記吸着部材が接続されており長手方向に延在している内腔を有する筒状部材と、前記筒状部材を支持している支持部材と、を有している請求項1に記載の搬送対象物の搬送方法。
【請求項7】
前記筒状部材は、前記長手方向の端である第1端と、前記長手方向の端であって前記第1端とは異なる位置に存在している第2端と、を有しており、
前記第1端は開口しており、
前記第2端は閉塞している請求項6に記載の搬送対象物の搬送方法。
【請求項8】
前記支持部材には、前記筒状部材の第1端部が貫通する孔が形成されている請求項7に記載の搬送対象物の搬送方法。
【請求項9】
前記支持部材は、天井部と、前記天井部下に配置されている側部とを有しており、
前記支持部材の側部に前記筒状部材の第1端部が貫通する孔が形成されている請求項8に記載の搬送対象物の搬送方法。
【請求項10】
前記吸着部材は前記筒状部材の下部に接続されている請求項6~9のいずれか一項に記載の搬送対象物の搬送方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送対象物の搬送方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
搬送対象物は、様々な方法で搬送され得る。搬送対象物を搬送する主体の例として、特許文献1には、基板の層をピックアップし、移動し、解放するように構成されたエンドエフェクタを含んでいるロボットワークステーションについて記載されている。エンドエフェクタは、第1および第2の支持部材と、第1および第2のクロス部材と、第1および第2のピックアップおよびリリース部材と、を含む。ロボットワークステーションは、エンドエフェクタを移動させることができるロボットマニピュレータを含む。第1および第2のピックアップおよびリリース部材はチューブと接続されており、チューブによって第1および第2のピックアップおよびリリース部材に真空空気圧が提供される。これによって、基板(または他のアイテム)との間で真空シールが形成され、第1および第2のピックアップおよびリリース部材は基板をピックアップできる。
【先行技術文献】
【特許文献】
【0003】
国際公開第2022/125597号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されているロボットワークステーションは、搬送対象物が容器内に配置されている場合のように、搬送対象物よりも上に存在している空間が比較的狭い場合に、搬送対象物を搬送しにくいものであった。
【0005】
本発明は前記事情に鑑みてなされたものであり、その目的は、搬送対象物が容器内に配置されている場合のように、搬送対象物よりも上に存在している空間が比較的狭い場合であっても、吸着ハンドの吸着部材で搬送対象物を搬送しやすくすることができる搬送対象物の搬送方法を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決できた本発明の搬送対象物の搬送方法とは、以下の通りである。
[1] 搬送対象物を吸着する吸着部材を有している吸着ハンドを準備するステップと、
底部と側部を有し、前記側部に開口部が形成されている容器を準備するステップと、
前記容器内に前記搬送対象物を配置するステップと、
前記容器の側部に形成されている開口部を介して前記吸着ハンドの吸着部材を前記容器内に挿入するステップと、
前記吸着ハンドの吸着部材が前記搬送対象物を吸着するステップと、
前記容器の側部に形成されている開口部を介して前記吸着ハンドを前記容器内から引き抜くステップと、
を有する搬送対象物の搬送方法。
【0007】
本発明の搬送対象物の搬送方法においては、側部に形成されている開口部を介して吸着ハンドの吸着部材を容器内に挿入する。これにより、搬送対象物よりも上に存在している空間が比較的狭い容器内であっても、吸着ハンドの吸着部材を容器内に挿入しやすくすることができる。このように、搬送対象物よりも上に存在している空間が比較的狭い場合であっても、吸着ハンドの吸着部材で搬送対象物を搬送しやすくすることができる。
【0008】
本発明の搬送対象物の搬送方法は、以下の[2]~[11]であることが好ましい。
[2] 前記容器の側部に形成されている開口部を介して前記吸着ハンドの吸着部材を前記容器内に挿入するステップにおいて、前記吸着ハンドを水平方向に移動させることによって前記吸着ハンドの吸着部材を前記容器内に挿入する[1]に記載の搬送対象物の搬送方法。
[3] 前記容器の側部に形成されている開口部を介して前記吸着ハンドを前記容器内から引き抜くステップにおいて、前記吸着ハンドを水平方向に移動させることによって前記吸着ハンドを前記容器内から引き抜く[1]または[2]に記載の搬送対象物の搬送方法。
[4] 前記容器内に前記搬送対象物を配置するステップにおいて、複数の前記搬送対象物が一定の方向に積層される[1]~[3]のいずれか一項に記載の搬送対象物の搬送方法。
[5] 前記一定の方向は鉛直方向である[4]に記載の搬送対象物の搬送方法。
[6] 前記吸着ハンドは、前記吸着部材が接続されており長手方向に延在している内腔を有する筒状部材と、前記筒状部材を支持している支持部材と、を有している[1]~[5]のいずれか一項に記載の搬送対象物の搬送方法。
[7] 前記筒状部材は、前記長手方向の端である第1端と、前記長手方向の端であって前記第1端とは異なる位置に存在している第2端と、を有しており、
前記第1端は開口しており、
前記第2端は閉塞している[6]に記載の搬送対象物の搬送方法。
[8] 前記支持部材には、前記筒状部材の第1端部が貫通する孔が形成されている[7]に記載の搬送対象物の搬送方法。
[9] 前記支持部材は、天井部と、前記天井部下に配置されている側部とを有しており、
前記支持部材の側部に前記筒状部材の第1端部が貫通する孔が形成されている[8]に記載の搬送対象物の搬送方法。
[10] 前記吸着部材は前記筒状部材の下部に接続されている[6]~[9]のいずれか一項に記載の搬送対象物の搬送方法。
[11] 前記吸着ハンドは、前記筒状部材の第1端と接続されている樹脂チューブを有し、
前記容器の側部に形成されている開口部を介して前記吸着ハンドの吸着部材を前記容器内に挿入するステップにおいて、前記筒状部材は前記容器の側部に形成されている開口部を介して前記容器内に挿入されるが、前記樹脂チューブは前記容器内に挿入されない[7]~[9]のいずれか一項に記載の搬送対象物の搬送方法。
【発明の効果】
【0009】
本発明の搬送対象物の搬送方法においては、側部に形成されている開口部を介して吸着ハンドの吸着部材を容器内に挿入する。これにより、搬送対象物よりも上に存在している空間が比較的狭い容器内であっても、吸着ハンドの吸着部材を容器内に挿入しやすくすることができる。このように、搬送対象物よりも上に存在している空間が比較的狭い場合であっても、吸着ハンドの吸着部材で搬送対象物を搬送しやすくすることができる。
【図面の簡単な説明】
【0010】
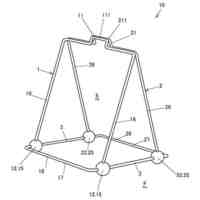
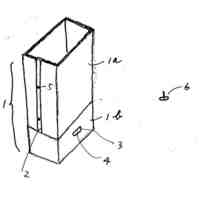
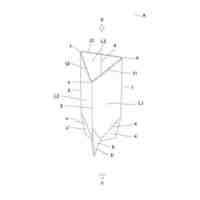
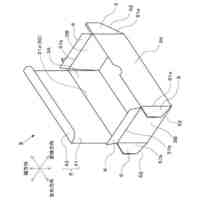
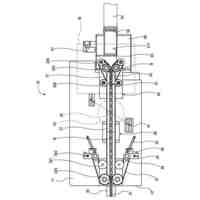
図1は、本発明の実施の形態に係る搬送対象物の搬送方法の一例を示す斜視図を表す。
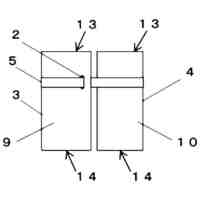
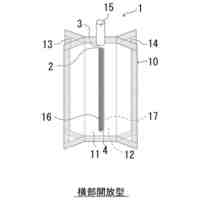
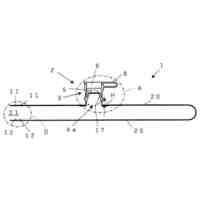
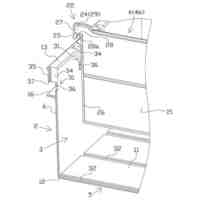
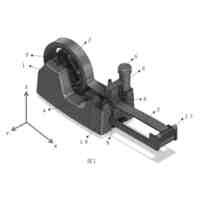
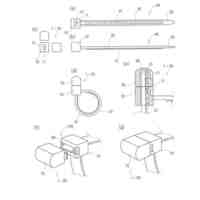
図2は、吸着ハンドの一例を示す平面図を表す。
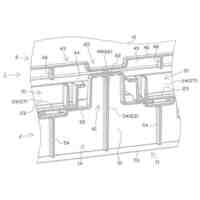
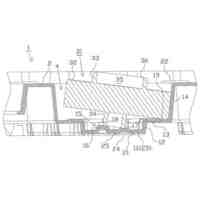
図3は、図2に示す吸着ハンドのIII-III線における断面図を表す。
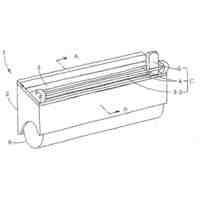
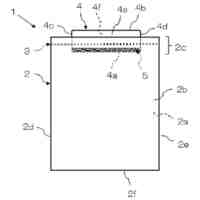
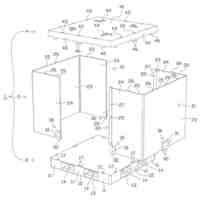
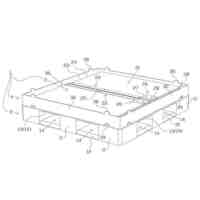
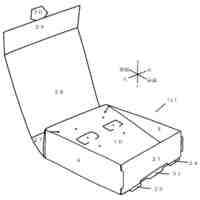
図4は、図1に示した容器のみを示す斜視図を表す。
図5は、本発明の実施の形態に係る搬送対象物の搬送方法を示すフローチャートを表す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社カネカ
樹脂膜形成用基材及び離型フィルム
3日前
株式会社カネカ
積層体、その製造方法、および成形体
3日前
個人
箱
1か月前
個人
ゴミ箱
1か月前
個人
包装体
1か月前
個人
収納用具
5か月前
個人
物品収納具
5か月前
個人
折り畳み水槽
1か月前
個人
パウチ補助具
1か月前
個人
開封用カッター
7か月前
個人
ダンボール宝箱
2か月前
個人
掃除楽々ゴミ箱
6か月前
個人
パウチ容器
8か月前
個人
圧縮収納袋
2か月前
個人
チャック付き袋体
7か月前
個人
折りたたみコップ
7か月前
株式会社イシダ
箱詰装置
4か月前
積水樹脂株式会社
接着剤
1か月前
三甲株式会社
容器
4か月前
個人
粘着テープ剥がし具
2か月前
株式会社新弘
容器
1か月前
個人
チャック付き保存袋
7か月前
積水樹脂株式会社
接着剤
6か月前
三甲株式会社
容器
3か月前
個人
伸縮するゴミ収納器
8か月前
個人
塗料容器用蓋
1か月前
株式会社新弘
容器
1か月前
個人
粘着テープ切断装置
3か月前
株式会社イシダ
包装装置
1か月前
個人
粘着テープ剥がし具
6か月前
三甲株式会社
トレー
6か月前
株式会社joze
攪拌容器
5か月前
個人
装飾品展示台兼梱包箱
7か月前
個人
蓋付結束バンド
3か月前
日東精工株式会社
検査装置
4か月前
個人
ゴミ箱用ゴミ袋保持具
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ