TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024150086
公報種別
公開特許公報(A)
公開日
2024-10-23
出願番号
2023063322
出願日
2023-04-10
発明の名称
ショックセンサ
出願人
株式会社ダイヘン
代理人
弁理士法人深見特許事務所
主分類
B25J
19/06 20060101AFI20241016BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】動作精度の向上を可能とする構成を備えるショックセンサを提供する。
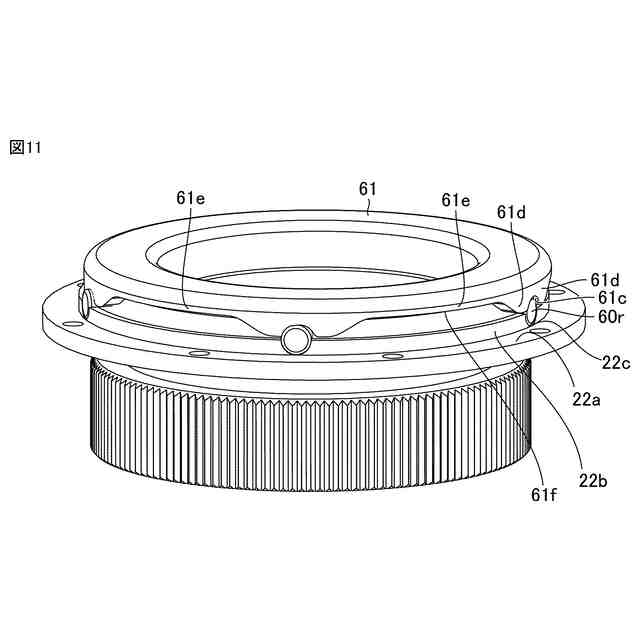
【解決手段】このショックセンサ1Aにおいて、スイングシャフト60は、円筒状ハウジング21内に位置するシャフト部材61Aと、環状受プレート22を挟み込むようにシャフト部材61Aに固定される位置決め環状リング62と、を含み、環状受プレート22とシャフト部材61Aとの間には、挟み込まれるように複数の円筒状ころ60rがその軸が放射状となるように配置され、環状受プレート22には、円筒状ころ60rを受入れる半円筒形状の第1受部22cが複数設けられ、シャフト部材61Aには、円筒状ころ60rを受入れる半円筒形状の第2受部61cが複数設けられ、シャフト部材61Aの隣り合う第2受部61cの間には、環状受プレートから離れる方向に凹む凹部領域61fが複数設けられている。
【選択図】図11
特許請求の範囲
【請求項1】
外部のロボットアームに取り付けられる取付面と、外部のツールが装着される装着面と、を備えるショックセンサであって、
中心軸に対して環状に設けられ、前記取付面を有し、前記中心軸を中心とする第1貫通孔を有する円盤状の環状アダプタと、
前記環状アダプタと同軸に前記環状アダプタに装着され、前記中心軸を中心とする第2貫通孔を有するハウジングと、
前記ハウジングに対して前記中心軸の軸方向に揺動可能に装着され、前記中心軸を中心とする第3貫通孔を有し、前記装着面が設けられるスイングシャフトと、
を備え、
前記ハウジングは、
前記環状アダプタ側に位置する円筒状ハウジングと、前記円筒状ハウジングに固定される環状受プレートと、を含み、
前記スイングシャフトは、
前記円筒状ハウジング内に位置するシャフト部材と、
前記環状受プレートを挟み込むように前記シャフト部材に固定される位置決め環状リングと、を含み、
前記環状受プレートと前記シャフト部材との間には、挟み込まれるように複数の円筒状ころがその軸が放射状となるように配置され、
前記環状受プレートには、前記円筒状ころを受入れる半円筒形状の第1受部が複数設けられ、
前記シャフト部材には、前記円筒状ころを受入れる半円筒形状の第2受部が複数設けられ、
前記シャフト部材の隣り合う前記第2受部の間には、前記環状受プレートから離れる方向に凹む凹部領域が複数設けられている、
ショックセンサ。
続きを表示(約 440 文字)
【請求項2】
前記環状受プレートは、
環状受部と、
前記環状受部の内側において前記環状アダプタ側に延びるように設けられる環状筒部と、を有し、
前記環状筒部に、複数の前記第1受部が設けられ、
前記シャフト部材は、
前記円筒状ハウジング内に位置し、前記第3貫通孔を規定するシャフト部材と、
前記シャフト部材の前記位置決め環状リングとは反対側の端部において外側に張り出すフランジ部と、
前記フランジ部の外側端部において前記位置決め環状リング側に伸びる側壁部と、を有し、
前記側壁部に、複数の前記第2受部および複数の凹部領域が設けられている、
請求項1に記載のショックセンサ。
【請求項3】
前記第1受部および前記第2受部は、等ピッチで円周上に合計5箇所設けられ、
前記凹部領域は、隣り合う前記第2受部の間に合計5箇所に設けられている、
請求項1に記載のショックセンサ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ショックセンサに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
ロボットアームの先端に取り付けられるツールの取替えに用いられるショックセンサを開示した先行技術文献として、特開2009-248148号公報(特許文献1)が挙げられる。
【先行技術文献】
【特許文献】
【0003】
特開2009-248148号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ショックセンサは、ロボットアームの手首軸回転近くに設けることが望ましい。ショックセンサは、ツールおよびロボットアームに想定以上の外力が加わった場合を検知して、ツールおよびロボットアームを保護する。近年ロボットアームが高速で動作することから、ショックセンサによる外力の検知には高精度が要求されるようになっている。
【0005】
この発明は、上記の課題を解決するためになされたものであって、動作精度の向上を可能とする構成を備えるショックセンサを提供することを目的とする。
【課題を解決するための手段】
【0006】
[1]:本開示のショックセンサにおいては、外部のロボットアームに取り付けられる取付面と、外部のツールが装着される装着面と、を備えるショックセンサであって、中心軸に対して環状に設けられ、上記取付面を有し、上記中心軸を中心とする第1貫通孔を有する円盤状の環状アダプタと、上記環状アダプタと同軸に上記環状アダプタに装着され、上記中心軸を中心とする第2貫通孔を有するハウジングと、上記ハウジングに対して上記中心軸の軸方向に揺動可能に装着され、上記中心軸を中心とする第3貫通孔を有し、上記装着面が設けられるスイングシャフトと、を備え、上記ハウジングは、上記環状アダプタ側に位置する円筒状ハウジングと、上記円筒状ハウジングに固定される環状受プレートと、を含み、上記スイングシャフトは、上記円筒状ハウジング内に位置するシャフト部材と、上記環状受プレートを挟み込むように上記シャフト部材に固定される位置決め環状リングと、を含み、上記環状受プレートと上記シャフト部材との間には、挟み込まれるように複数の円筒状ころがその軸が放射状となるように配置され、上記環状受プレートには、上記円筒状ころを受入れる半円筒形状の第1受部が複数設けられ、上記シャフト部材には、上記円筒状ころを受入れる半円筒形状の第2受部が複数設けられ、上記シャフト部材の隣り合う上記第2受部の間には、上記環状受プレートから離れる方向に凹む凹部領域が複数設けられている。
【0007】
[2]:[1]に記載のショックセンサにおいて、上記環状受プレートは、環状受部と、上記環状受部の内側において上記環状アダプタ側に延びるように設けられる環状筒部と、を有し、上記環状筒部に、複数の上記第1受部が設けられ、上記シャフト部材は、上記円筒状ハウジング内に位置し、上記第3貫通孔を規定するシャフト部材と、上記シャフト部材の上記位置決め環状リングとは反対側の端部において外側に張り出すフランジ部と、上記フランジ部の外側端部において上記位置決め環状リング側に伸びる側壁部と、を有し、上記側壁部に、複数の上記第2受部および複数の凹部領域が設けられている。
【0008】
[3]:[1]または[2]に記載のショックセンサにおいて、上記第1受部および上記第2受部は、等ピッチで円周上に合計5箇所設けられ、上記凹部領域は、隣り合う上記第2受部の間に合計5箇所に設けられている。
【発明の効果】
【0009】
本開示のショックセンサによれば、動作精度の向上を可能とする構成を備えるショックセンサの提供を可能とする。
【図面の簡単な説明】
【0010】
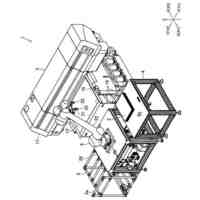
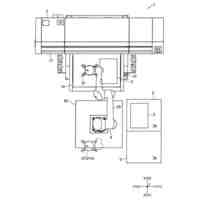
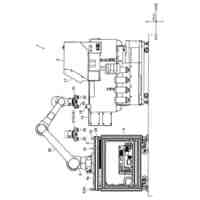
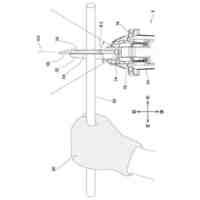
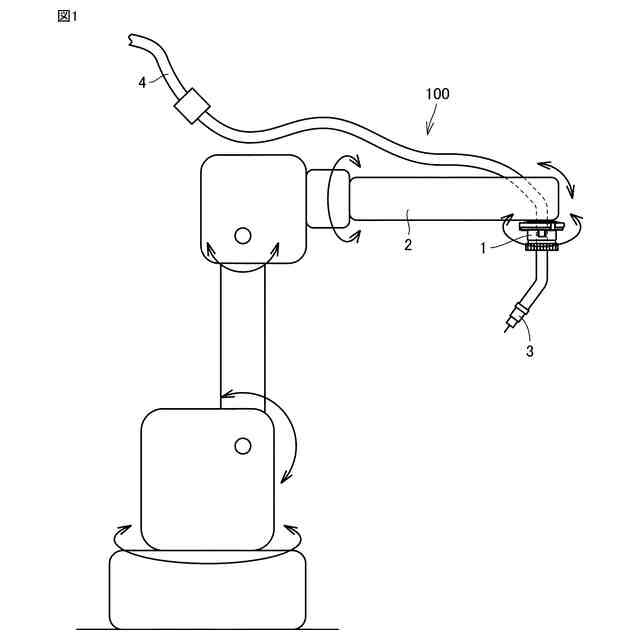
ショックセンサを装着した産業用ロボット装置の全体構成図である。
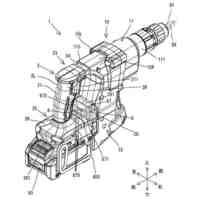
比較例のショックセンサの全体斜視図である。
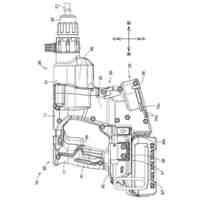
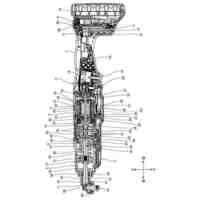
比較例のショックセンサの分解斜視図である。
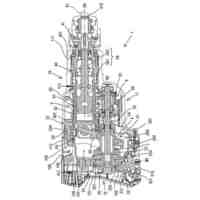
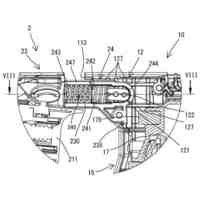
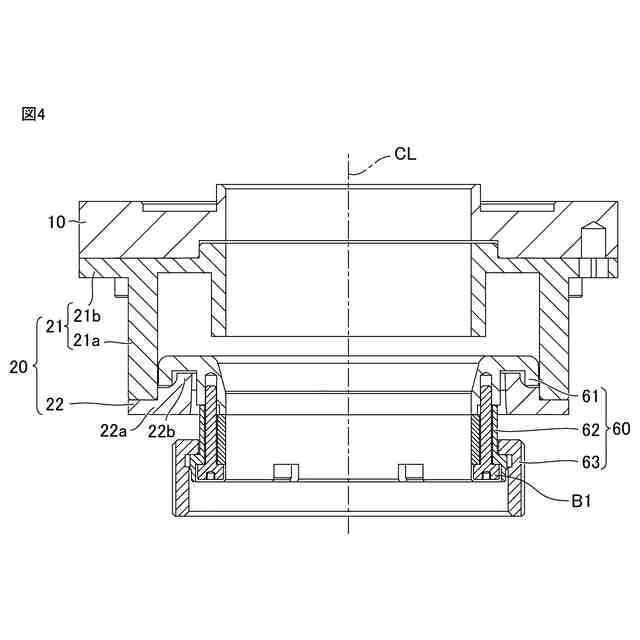
図2中のIV-IV線矢視断面図である。
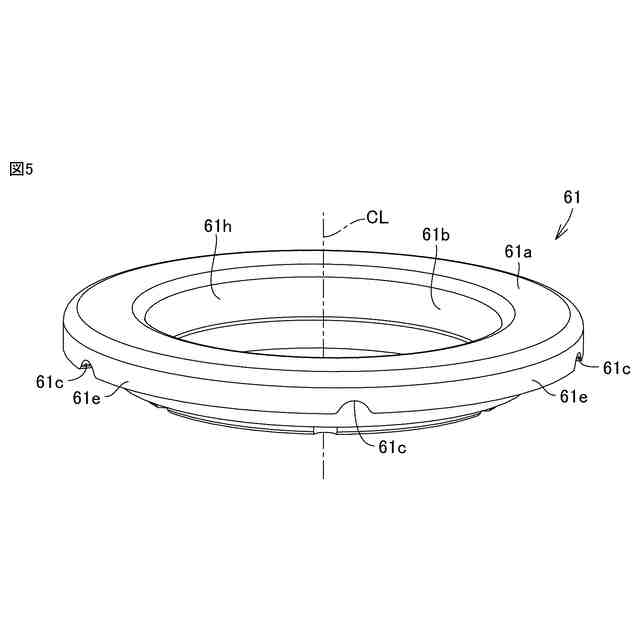
比較例のスイングシャフトに設けられるシャフト部材の斜視図である。
比較例のスイングシャフトの揺動状態を示す第1図である。
比較例のスイングシャフトの揺動状態を示す第2図である。
実施の形態のショックセンサの分解斜視図である。
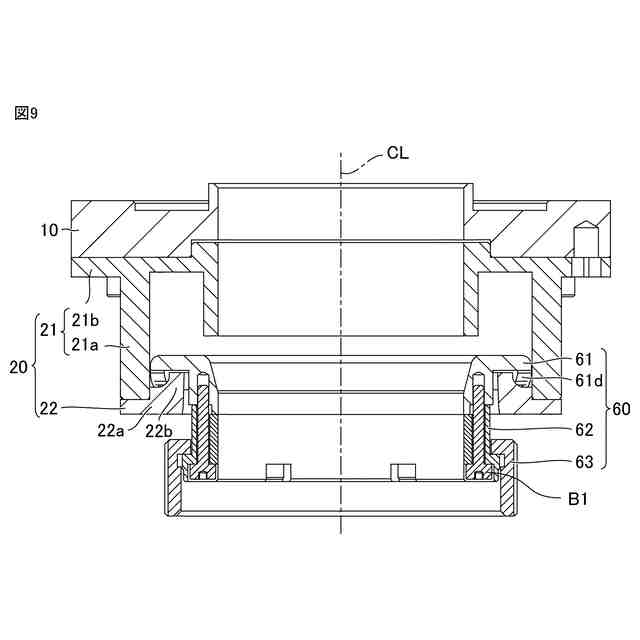
図2中のIV-IV線矢視に相当する断面図である。
実施の形態のスイングシャフトに設けられるシャフト部材の斜視図である。
実施の形態のスイングシャフトの揺動状態を示す第1図である。
実施の形態のスイングシャフトの揺動状態を示す第2図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
3日前
株式会社マキタ
電動工具
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットリスト
11日前
川崎重工業株式会社
ロボットアーム
11日前
日本車輌製造株式会社
締め付け工具
11日前
CKD株式会社
吸着型搬送装置
25日前
川崎重工業株式会社
ロボットシステム
11日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社安川電機
ロボット
28日前
長堀工業株式会社
締結装置
1か月前
ジヤトコ株式会社
圧入装置
24日前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
今日
トヨタ自動車株式会社
制御装置及び制御方法
11日前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
12日前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
3日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社DailyColor
ロボットハンド
12日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
有限会社松尾エンジニアリング
連結部材
12日前
個人
ターンバックル用工具
18日前
株式会社SHIN‐JIGEN
上肢アシスト装置
17日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社マキタ
電動工具
3日前
株式会社マキタ
作業機
24日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
往復動工具
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ