TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024147347
公報種別
公開特許公報(A)
公開日
2024-10-16
出願番号
2023060298
出願日
2023-04-03
発明の名称
電動工具及び電動工具システム
出願人
株式会社マキタ
代理人
弁理士法人勇智国際特許事務所
主分類
B25F
5/00 20060101AFI20241008BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】電動工具におけるカメラの活用に関する改善を提供する。
【解決手段】電動工具は、少なくとも1つのアクセサリを取り外し可能に装着可能に構成されている。電動工具は、少なくとも1つのカメラと、判断部とを備える。少なくとも1つのアクセサリは、補助ハンドル、及び、前記電動工具に取り外し可能に装着された先端工具を少なくとも部分的に覆うカバーのうち少なくとも一方である。判断部は、少なくとも1つのカメラから出力される画像データを画像処理し、少なくとも、少なくとも1つのアクセサリが電動工具に取り付けられているか否かに基づき、少なくとも1つのアクセサリの状態が正常か否かを判断するように構成されている。
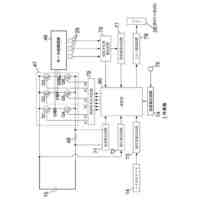
【選択図】 図4
特許請求の範囲
【請求項1】
少なくとも1つのアクセサリを取り外し可能に装着可能な電動工具であって、
少なくとも1つのカメラと、
判断部とを備え、
前記少なくとも1つのアクセサリは、補助ハンドル、及び、前記電動工具に取り外し可能に装着された先端工具を少なくとも部分的に覆うカバーのうち少なくとも一方であって、
前記判断部は、前記少なくとも1つのカメラから出力される画像データを画像処理し、少なくとも、前記少なくとも1つのアクセサリが前記電動工具に取り付けられているか否かに基づき、前記少なくとも1つのアクセサリの状態が正常か否かを判断するように構成されていることを特徴とする電動工具。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の電動工具であって、
前記判断部は、機械学習による学習済みモデルに前記画像データを入力することで前記少なくとも1つのアクセサリの前記状態を推論し、前記少なくとも1つのアクセサリの状態が正常か否かを判断するように構成されていることを特徴とする電動工具。
【請求項3】
請求項2に記載の電動工具であって、
前記判断部は、プロセッサであって、
前記プロセッサは、前記学習済みモデルを記憶するメモリと共に、1つのチップとして構成されていることを特徴とする電動工具。
【請求項4】
請求項1~3の何れか1つに記載の電動工具であって、
工具本体と、
前記工具本体に収容されたモータと、
使用者によって手動操作されるように構成された操作部材と、
前記操作部材に対する手動操作に応じてオンとされるように構成されたメインスイッチと、
前記メインスイッチの状態及び前記判断部の判断結果に基づいて、前記電動工具の動作を制御するように構成された制御部とを更に備え、
前記制御部は、前記メインスイッチがオンであり、且つ、前記判断部によって前記少なくとも1つのアクセサリの前記状態が正常であると判断されたときにのみ、前記モータの駆動を開始するように構成されていることを特徴とする電動工具。
【請求項5】
請求項4に記載の電動工具であって、
前記判断部は、前記モータの駆動中に、前記少なくとも1つのアクセサリの前記状態が正常か否かを定期的に判断するように構成されており、
前記制御部は、前記モータの駆動中に、前記判断部によって前記少なくとも1つのアクセサリの前記状態が正常でないと判断されるのに応じて、前記モータの駆動を停止する、又は、前記モータの回転数を低下させるように構成されていることを特徴とする電動工具。
【請求項6】
請求項4又は5に記載の電動工具であって、
前記判断部と前記制御部とは、有線接続又は無線接続された別個のプロセッサであることを特徴とする電動工具。
【請求項7】
請求項1~6の何れか1つに記載の電動工具であって、
前記判断部によって前記少なくとも1つのアクセサリの前記状態が正常でないと判断されるのに応じて、異常を示す情報を報知するように構成された報知部を更に備えた電動工具。
【請求項8】
請求項1~7の何れか1つに記載の電動工具であって、
使用者の所定動作を検知するように構成された検知部を更に備え、
前記少なくとも1つのカメラ及び前記判断部は、前記検知部による前記所定動作の検知に応じて起動されるように構成されていることを特徴とする電動工具。
【請求項9】
請求項1~8の何れか1つに記載の電動工具であって、
前記少なくとも1つのアクセサリは、前記補助ハンドルであって、
前記判断部は、前記補助ハンドルが前記電動工具に取り付けられており、且つ、使用者によって前記補助ハンドルが把持されていると判断するのに応じて、前記少なくとも1つのアクセサリの前記状態が正常であると判断するように構成されていることを特徴とする電動工具。
【請求項10】
請求項1~9の何れか1つに記載の電動工具であって、
前記少なくとも1つのカメラと前記判断部とは、有線接続されていることを特徴とする電動工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、アクセサリを取り外し可能に取り付け可能な電動工具、及び、アクセサリを取り外し可能に取り付け可能な電動工具を含む電動工具システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
カメラによって撮影された画像の画像データを用いて、作業対象を特定し、処理を行う電動工具が知られている。例えば、特許文献1には、カメラによる撮像画像と基準画像との比較結果に基づいて、複数の作業対象のうち撮像画像に写る作業対象を、工具がセットされた作業対象として特定することが可能な可搬型の工具が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-108633号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の電動工具は、作業対象の特定結果をその後の処理に活用している。しかしながら、カメラにより得られる撮像画像に関しては、更なる活用の余地がある。
【0005】
本開示は、電動工具におけるカメラの活用に関する改善を提供することを、非限定的な1つの目的とする。
【課題を解決するための手段】
【0006】
本開示の非限定的な1つの態様によれば、少なくとも1つのアクセサリを取り外し可能に装着可能な電動工具が提供される。この電動工具は、少なくとも1つのカメラと、判断部とを備える。本態様の少なくとも1つのアクセサリは、補助ハンドル、及び、電動工具に取り付けられた先端工具を少なくとも部分的に覆うカバーのうち少なくとも一方である。判断部は、少なくとも1つのカメラから出力される画像データを画像処理し、少なくとも、少なくとも1つのアクセサリが電動工具に取り付けられているか否かに基づき、少なくとも1つのアクセサリの状態が正常か否かを判断するように構成されている。
【0007】
なお、「アクセサリ」とは、電動工具に補助的に取り付けられて電動工具と共に使用される器具/装置をいう。補助ハンドルを取り付け可能な電動工具として、例えば、先端工具を駆動軸周りに回転駆動するいわゆる回転工具(例えば、グラインダ)や穿孔工具(例えば、ハンマドリル、ドライバドリル)がある。また、カバーとしては、例えば、グラインダに取り付けられる円板状の先端工具(例えば、砥石、ゴムパッド、ブラシ、ブレード)用のホイールカバー(ホイールガードともいう)、ハンマ、ハンマドリルに取り付けられる長尺状の先端工具用の集塵アタッチメントが挙げられる。
【0008】
電動工具に取り付け可能なアクセサリのうち、補助ハンドルや、先端工具を少なくとも部分的に覆うように構成されたカバーは、電動工具に取り付けられているか否かで、作業環境に大きな影響を与えうる。本態様の電動工具の判断部は、少なくとも1つのカメラによる撮像画像の画像データを用いて、少なくとも、補助ハンドル及び/又はカバーが取り付けられているか否かに基づき、補助ハンドル及び/又はカバーの状態が正常か否かを判断する。これにより、判断結果を、その後の適切な処理(例えば、モータの制御、使用者に対する情報報知)に活用することが可能となる。
【0009】
本開示の非限定的な別の1つの態様によれば、電動工具と判断部とを備えた電動工具システムが提供される。電動工具は、少なくとも1つのアクセサリを取り外し可能に装着可能に構成されている。また、電動工具は、少なくとも1つのカメラを備える。判断部は、少なくとも1つのカメラによる撮像画像の画像データを、機械学習による学習済みモデルに入力することで、少なくとも1つのアクセサリの状態を推論し、少なくとも1つのアクセサリの状態が正常か否かを判断するように構成されている。なお、本態様において、判断部は、電動工具に設けられていてもよい。あるいは、判断部は、電動工具とは別個の外部装置に設けられていてもよい。電動工具と外部装置とは、ネットワークを介して接続されていてもよいし、無線又は有線で直接接続されていてもよい。
【0010】
本態様の電動工具システムの判断部は、少なくとも1つのカメラによる撮像画像の画像データを用いて、少なくとも、補助ハンドル及び/又はカバーが取り付けられているか否かに基づき、補助ハンドル及び/又はカバーの状態が正常か否かを判断する。これにより、判断結果を、その後の適切な処理(例えば、モータの制御、使用者に対する情報報知)に活用することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動工具
14日前
個人
寸切りボルト回し
2か月前
コクヨ株式会社
補助器具
2か月前
太陽工業株式会社
チャック装置
2か月前
株式会社マキタ
打撃工具
20日前
オムロン株式会社
電動把持工具
2か月前
株式会社ダイヘン
制御装置
28日前
株式会社マキタ
電動ハンマ
1か月前
株式会社エビス
携帯付属物取付具
20日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
20日前
株式会社スター精機
把持装置
2か月前
川崎重工業株式会社
ロボット
28日前
SMC株式会社
グリッパ
1か月前
学校法人立命館
ロボットハンド
8日前
日本電業工作株式会社
移動装置
2か月前
フジセン技工株式会社
マーキング装置
2か月前
株式会社近藤製作所
産業用ロボットチャック
1か月前
工機ホールディングス株式会社
作業機
2か月前
白山工業株式会社
遠隔操作ロボット機構
1か月前
フジセン技工株式会社
自動ねじ締め装置
2か月前
トヨタ自動車株式会社
ロボットチャック
1か月前
株式会社やまびこ
電動作業機
2か月前
株式会社やまびこ
電動作業機
2か月前
株式会社不二越
垂直多関節ロボット
1か月前
中国電力株式会社
ボルト共回り防止用工具
1か月前
株式会社デンソーウェーブ
産業用ロボット
1か月前
株式会社IPS PLIERS
ペグ用工具
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
2か月前
日本精工株式会社
回転駆動力伝達機構
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社エアテックジャパン
電動工具
1か月前
白山工業株式会社
ロボットの手首機構
1か月前
株式会社マキタ
電動作業機
20日前
株式会社不二越
協働ロボットシステム
2か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ