TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024125565
公報種別
公開特許公報(A)
公開日
2024-09-19
出願番号
2023033461
出願日
2023-03-06
発明の名称
協働ロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20240911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】安全性を向上させることができる協働ロボットシステムを提供する。
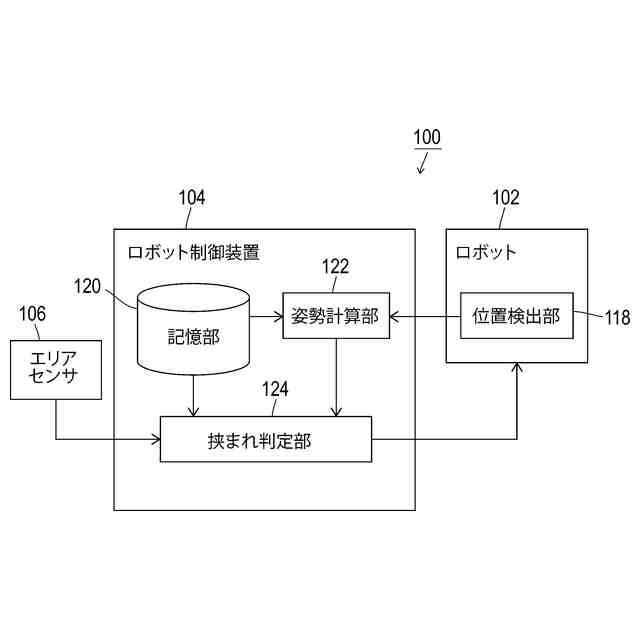
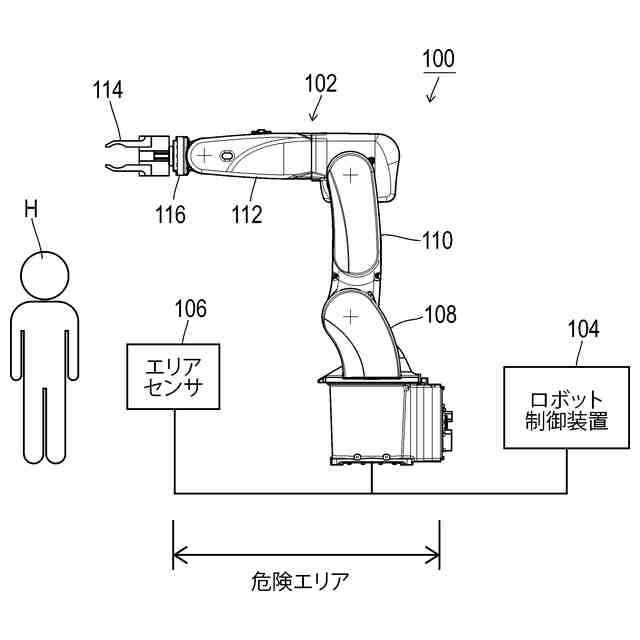
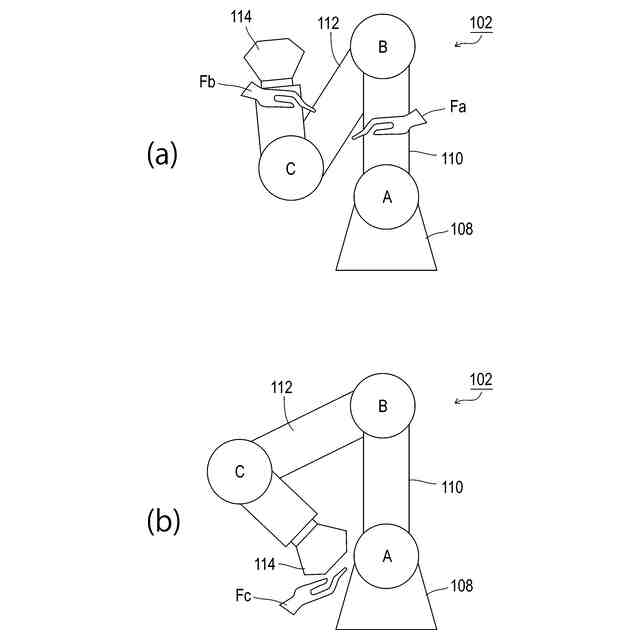
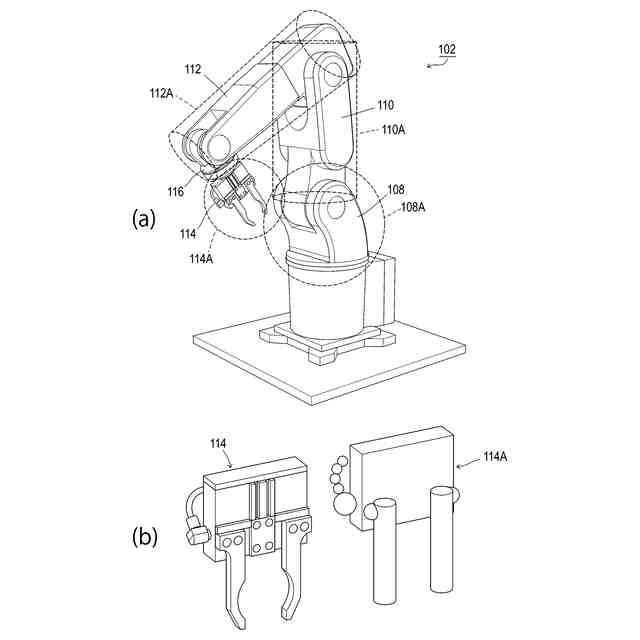
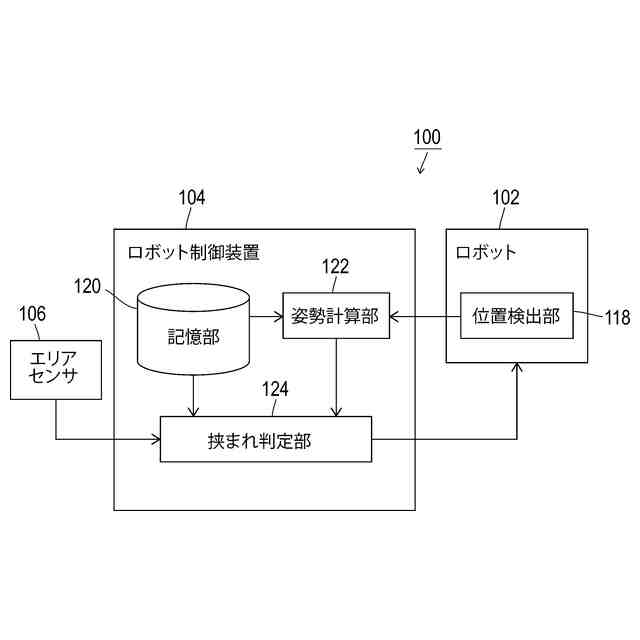
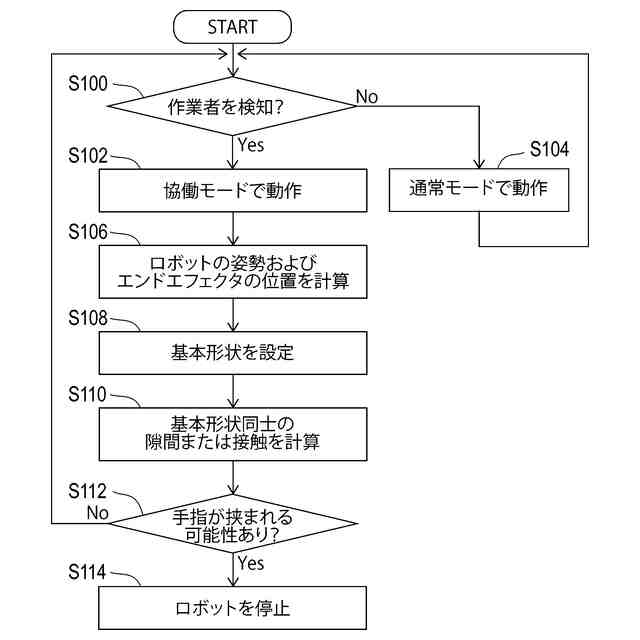
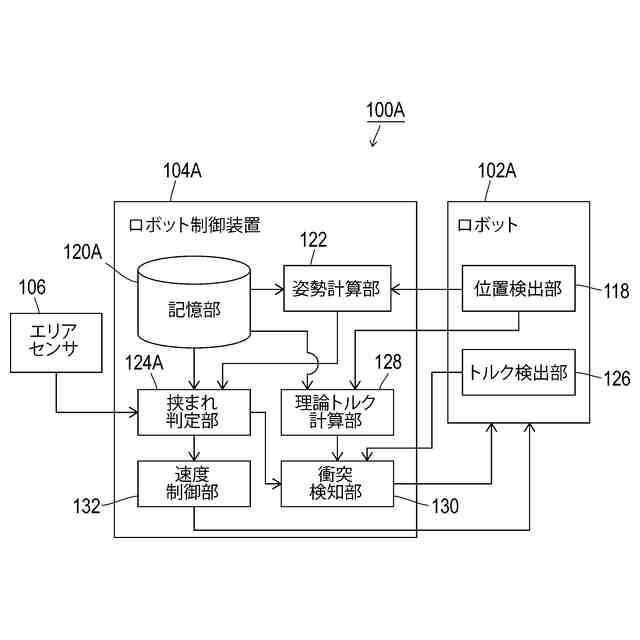
【解決手段】協働ロボットシステム100は、複数のアーム110、112と、アームの先端116に装着されたエンドエフェクタ114とを有するロボット102と、ロボット制御装置104とを備え、ロボット制御装置は、リンクパラメータ、アームを含むロボットの本体形状およびエンドエフェクタの形状を記憶した記憶部120と、リンクパラメータに基づいてロボットの姿勢およびエンドエフェクタの位置を計算する姿勢計算部122と、本体形状またはエンドエフェクタの形状を包含する基本形状を設定し、基本形状、ロボットの姿勢およびエンドエフェクタの位置に基づいて、基本形状同士の隙間または接触を計算することによって、ロボットのアーム同士の間またはアームとエンドエフェクタとの間に作業者の手指が挟まれる可能性の有無を判定する挟まれ判定部124とを有する。
【選択図】図4
特許請求の範囲
【請求項1】
複数のアームと、該アームの先端に装着されたエンドエフェクタとを有するロボットと、
前記ロボットの動作を制御するロボット制御装置とを備え、
前記ロボット制御装置は、
リンクパラメータと、前記複数のアームを含む前記ロボットの本体形状と、前記エンドエフェクタの形状とを記憶した記憶部と、
前記リンクパラメータに基づいて前記ロボットの姿勢および前記エンドエフェクタの位置を計算する姿勢計算部と、
前記ロボットの前記アーム同士の間または前記アームと前記エンドエフェクタとの間に作業者の手指が挟まれる可能性の有無を判定する挟まれ判定部とを有し、
前記挟まれ判定部は、
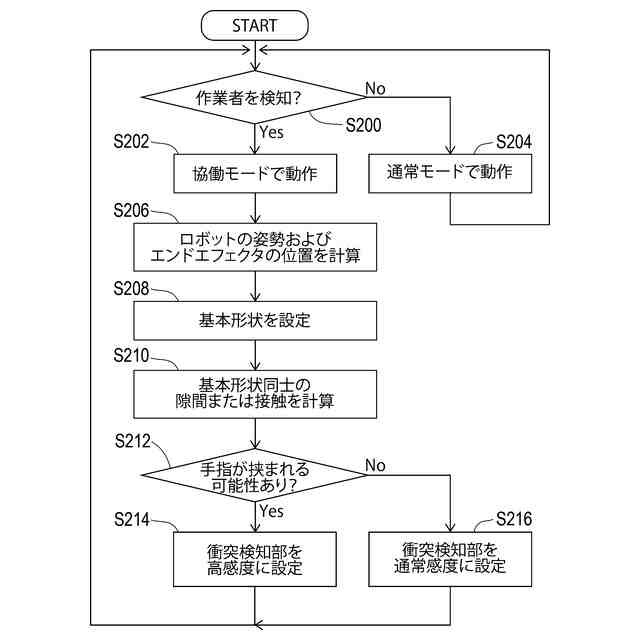
前記本体形状または前記エンドエフェクタの形状を包含する基本形状を設定し、該基本形状と、前記ロボットの姿勢と、前記エンドエフェクタの位置とに基づいて、該基本形状同士の隙間または接触を計算することによって手指が挟まれる可能性の有無を判定することを特徴とする協働ロボットシステム。
続きを表示(約 380 文字)
【請求項2】
前記ロボット制御装置は、前記挟まれ判定部が手指が挟まれる可能性があると判定すると、作業者がロボットの可動範囲から離れるまで前記ロボットを停止することを特徴とする請求項1に記載の協働ロボットシステム。
【請求項3】
前記ロボット制御装置は、前記アームまたは前記エンドエフェクタと、作業者との衝突を前記アームの軸トルクの変化によって検知する衝突検知部をさらに備え、
前記挟まれ判定部が手指が挟まれる可能性があると判定すると、前記衝突検知部の検出感度を高感度に設定することを特徴とする請求項1または2に記載の協働ロボットシステム。
【請求項4】
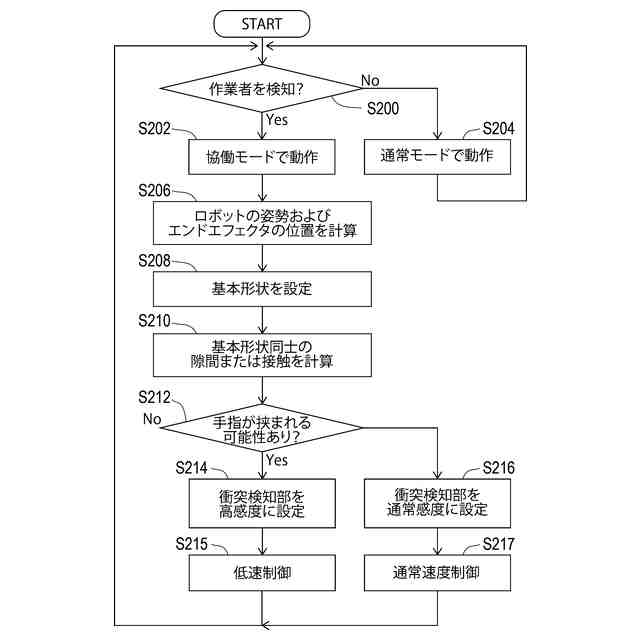
前記ロボット制御装置は、前記挟まれ判定部が手指が挟まれる可能性があると判定すると、前記ロボットの動作を低速にすることを特徴とする請求項3に記載の協働ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、安全機能を有する協働ロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
作業者と作業領域を共有する産業用ロボット、いわゆる協働ロボットでは安全対策が求められる。この安全対策は、本質安全と機能安全に分けることができる。本質安全とは、構造や仕組みとして確保する安全性である。例えば、アーム間の隙間を大きく取ることによって、アームが畳まれたときに作業者の指が挟まれにくい構造を採用することが該当する。機能安全とは、制御によって確保する安全性である。例えば、アームと作業者とが衝突するとロボットが停止することで衝突を防止することが該当する。
【0003】
本質安全は望ましい対策ではあるが、アーム間の隙間を大きく取るなど、ロボットの形状・構造に制約が生じるため、設計自由度が失われるという問題がある。そこで、本質安全で対応できないリスクについて機能安全で対応するロボットを用いて、通常は機能安全による制限のない通常モードで動作させて、作業者が近づいたら機能安全を実施することが考えられる。
【0004】
特許文献1には、少なくとも複数本の可動脚を備えた脚式移動ロボットの制御装置が記載されている。この制御装置は、感圧センサで構成された挟み込み検出部を備える。この感圧センサは、回転軸を持つロボットの可動部とロボット自身の部位との接触点と回転軸との隙間に取り付けられている。これにより感圧センサは、ロボットの可動部とこれに接触するロボット自身のいずれかの部位との間に手指などが挟まり得る危険なロボット姿勢のとき、手指などの挟み込みを検知する。
【0005】
特許文献2には、可動部と胴部とを備えたロボットが記載されている。このロボットは、可動部と胴部との隙間が一定値以下になる部分に接触センサまたは圧力センサを備え、隙間が一定値以下になった場合をセンサで検出すると、可動部用アクチュエータのトルクを制限し、指等を挟む危険を回避している。
【先行技術文献】
【特許文献】
【0006】
特開2004-174644号公報
特開2000-158378号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし特許文献1、2では、各センサによって手指の挟み込みを検知しているに過ぎない。そのため、手指が挟まれうる状態、すなわち実際に手指が挟まれなくても、手指が挟まれる可能性がある状態を検知することはできず、機能安全を確実に実施することは困難である。また挟み込みをセンサによって確実に検知するためには、大量のセンサを搭載しなくてはならないという問題がある。
【0008】
本発明は、このような課題に鑑み、安全性を向上させることができる協働ロボットシステムを提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明にかかる協働ロボットシステムの代表的な構成は、複数のアームと、アームの先端に装着されたエンドエフェクタとを有するロボットと、ロボットの動作を制御するロボット制御装置とを備え、ロボット制御装置は、リンクパラメータと、複数のアームを含むロボットの本体形状と、エンドエフェクタの形状とを記憶した記憶部と、リンクパラメータに基づいてロボットの姿勢およびエンドエフェクタの位置を計算する姿勢計算部と、ロボットのアーム同士の間またはアームとエンドエフェクタとの間に作業者の手指が挟まれる可能性の有無を判定する挟まれ判定部とを有し、挟まれ判定部は、本体形状またはエンドエフェクタの形状を包含する基本形状を設定し、基本形状と、ロボットの姿勢と、エンドエフェクタの位置とに基づいて、基本形状同士の隙間または接触を計算することによって手指が挟まれる可能性の有無を判定することを特徴とする。
【0010】
上記のロボット制御装置は、挟まれ判定部が手指が挟まれる可能性があると判定すると、人間がロボットの可動範囲から離れるまでロボットを停止することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
歯車研削盤
13日前
株式会社不二越
軸受付き歯車
5日前
株式会社不二越
軸受用冠型保持器
5日前
株式会社不二越
減速機用回転部品
23日前
株式会社不二越
液圧駆動システム
1か月前
株式会社不二越
電食防止転がり軸受
5日前
株式会社不二越
インタラップタップ
5日前
株式会社不二越
歯切工具およびその製造方法
1か月前
株式会社不二越
回転軸付きスカイビングカッタ
13日前
株式会社不二越
斜板式可変容量型ピストンポンプ
20日前
株式会社不二越
ソレノイドバルブ用互換スペーサ
27日前
株式会社不二越
オフラインダイレクトティーチング装置
27日前
株式会社不二越
スカイビングカッタおよびそれを用いた歯車加工治具
27日前
株式会社不二越
回転センサ付き軸受装置
27日前
株式会社不二越
転がり軸受部品用合金鋼,転がり軸受用軌道輪,転がり軸受および転がり軸受用軌道輪の製造方法
1か月前
個人
腰袋
12日前
株式会社マキタ
電動工具
5日前
株式会社マキタ
電動工具
20日前
川崎重工業株式会社
ロボットリスト
20日前
川崎重工業株式会社
ロボットアーム
20日前
川崎重工業株式会社
ロボットアーム
20日前
日本車輌製造株式会社
締め付け工具
20日前
日本信号株式会社
作業機制御システム
5日前
CKD株式会社
吸着型搬送装置
1か月前
川崎重工業株式会社
ロボットシステム
20日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
6日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社スター精機
ワーク搬送装置
9日前
株式会社マキタ
集塵アタッチメント
5日前
モトコマ株式会社
寄せポンチホルダー
21日前
川崎重工業株式会社
ロボットシステム
12日前
トヨタ自動車株式会社
制御装置及び制御方法
20日前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ