TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024146040
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058710
出願日
2023-03-31
発明の名称
車両の制御装置、車両制御方法及びコンピュータプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
,
株式会社アイシン
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20241004BHJP(信号)
要約
【課題】運転復帰の練習を、様々な走行シーンにおいて適切な頻度でドライバに実施させる。
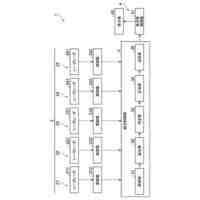
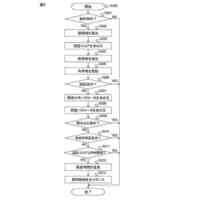
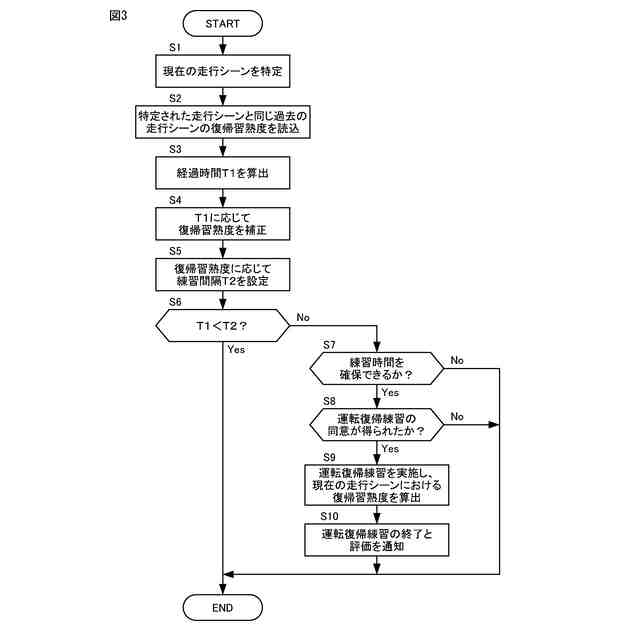
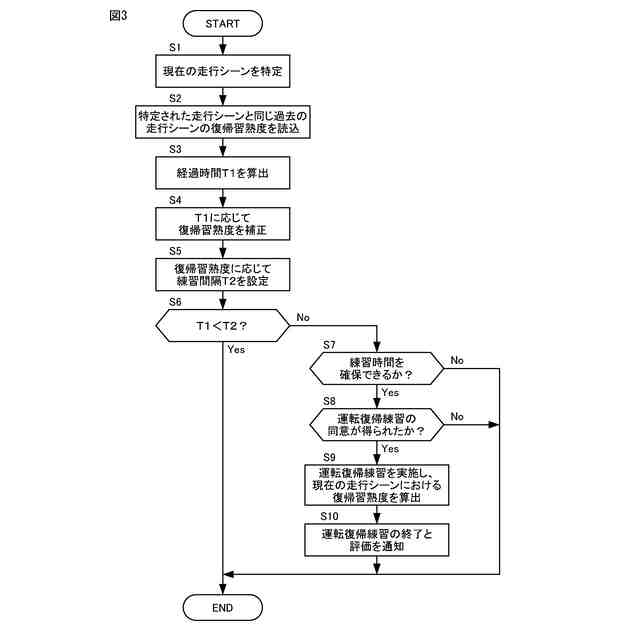
【解決手段】制御装置5は、車両100の運転操作を自動的に行う自動運転を実施し、自動運転から運転タスクの少なくとも一部をドライバが実施する手動運転への運転復帰練習を自動運転中にドライバに対して行わせるとともに、運転復帰練習を実施したときに運転復帰に要した時間及び運転復帰期間におけるドライバの行動の一方又は双方に基づいて運転復帰の習熟度を算出し、車両の周辺の状況を表す周辺データに基づいて現在の走行シーンを特定し、現在と同じ走行シーンで最後に運転復帰練習を実施したときに算出された習熟度に応じた頻度で、運転復帰練習を実施するように構成される。
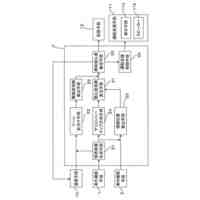
【選択図】図3
特許請求の範囲
【請求項1】
車両の制御装置であって、
前記車両の運転操作を自動的に行う自動運転を実施し、
自動運転から運転タスクの少なくとも一部をドライバが実施する手動運転への運転復帰練習を自動運転中にドライバに対して行わせるとともに、前記運転復帰練習を実施したときに運転復帰に要した時間及び運転復帰期間におけるドライバの行動の一方又は双方に基づいて運転復帰の習熟度を算出し、
前記車両の周辺の状況を表す周辺データに基づいて、現在の走行シーンを特定し、
現在と同じ走行シーンで最後に前記運転復帰練習を実施したときに算出された前記習熟度に応じた頻度で、前記運転復帰練習を実施するように構成される、
車両の制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記習熟度が高いときは、低いときと比べて前記頻度を少なくするように構成される、
請求項1に記載の車両の制御装置。
【請求項3】
現在と同じ走行シーンで最後に前記運転復帰練習を実施したときに算出された前記習熟度に基づいて、練習間隔を設定し、
現在と同じ走行シーンで最後に前記運転復帰練習を実施してからの経過時間が、前記練習間隔以上であれば、前記運転復帰練習を実施するように構成される、
請求項1に記載の車両の制御装置。
【請求項4】
前記習熟度が高いときは、低いときと比べて前記練習間隔を長くするように構成される、
請求項3に記載の車両の制御装置。
【請求項5】
現在と同じ走行シーンで最後に前記運転復帰練習を実施してからの経過時間に基づいて、前記習熟度を低下させる補正を実施し、
前記経過時間が長くなるにつれて、漸進的又は段階的に補正による低下量を大きくするように構成される、
請求項1から請求項4までのいずれか1項に記載の車両の制御装置。
【請求項6】
運転復帰に要した時間が短いときは、長いときと比べて前記習熟度を高くするように構成される、
請求項1から請求項4までのいずれか1項に記載の車両の制御装置。
【請求項7】
運転復帰期間におけるドライバの行動を、走行シーンごとに設定された評価項目と照らし合わせ、前記評価項目と合致する行動が多いときは、少ないときと比べて前記習熟度を高くするように構成される、
請求項1から請求項4までのいずれか1項に記載の車両の制御装置。
【請求項8】
前記評価項目には、
走行シーンごとに予め設定された安全確認動作の実施有無及び実施タイミングが含まれる、
請求項7に記載の車両の制御装置。
【請求項9】
前記評価項目には、
運転復帰期間における運転操作の操作量が、走行シーンごとに予め設定された許容量を超えていないことが含まれる、
請求項7に記載の車両の制御装置。
【請求項10】
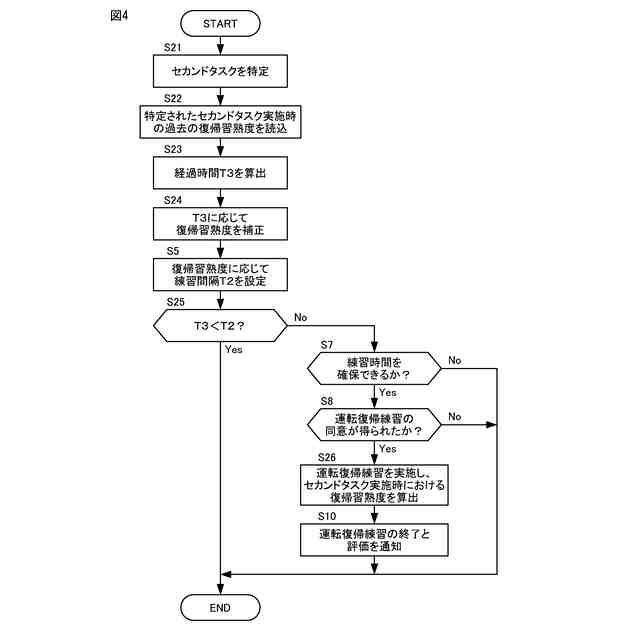
前記ドライバの状態を表すドライバデータに基づいて、自動運転中に前記ドライバが実施しているセカンドタスクを特定し、
現在と同じセカンドタスクを実施しているときに行われた直近の前記運転復帰練習時に算出された前記習熟度に応じた頻度で、前記運転復帰練習を別途に実施するように構成される、
請求項1から請求項4までのいずれか1項に記載の車両の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の制御装置、車両制御方法及びコンピュータプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、従来の自動運転システムとして、自動運転を実施しているときに、自動運転から手動運転への運転復帰の練習をドライバに実施させるものが開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6733293号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、前述した従来の自動運転システムは、自車両の周辺に他車両が存在せず、かつ、一定速度での運転を一定時間継続することができると予想される走行シーンなど、運転復帰の練習に適した走行シーンのときに、運転復帰の練習をドライバに実施させるように構成されていた。
【0005】
自動運転から手動運転への運転復帰の要求は、様々な走行シーンで自動運転システムからドライバに対して出されることが想定され、必ずしも運転復帰に適した走行シーンで出されるとは限らない。そのため、前述した従来の自動運転システムでは、運転復帰の練習を実施していない走行シーンで運転復帰の要求が出されるおそれがあり、その結果、走行シーンによっては速やかな運転復帰を行うことができないおそれがある。
【0006】
本発明は、このような問題点に着目してなされたものであり、運転復帰の練習を、様々な走行シーンにおいて適切な頻度でドライバに実施させることを目的とする。
【課題を解決するための手段】
【0007】
本開示の要旨は以下のとおりである。
【0008】
(1)車両の制御装置であって、車両の運転操作を自動的に行う自動運転を実施し、自動運転から運転タスクの少なくとも一部をドライバが実施する手動運転への運転復帰練習を自動運転中にドライバに対して行わせるとともに、運転復帰練習を実施したときに運転復帰に要した時間及び運転復帰期間におけるドライバの行動の一方又は双方に基づいて運転復帰の習熟度を算出し、車両の周辺の状況を表す周辺データに基づいて現在の走行シーンを特定し、現在と同じ走行シーンで最後に前記運転復帰練習を実施したときに算出された習熟度に応じた頻度で、運転復帰練習を実施するように構成される、車両の制御装置。
【0009】
(2)習熟度が高いときは、低いときと比べて運転復帰練習の頻度を少なくするように構成される、上記(1)に記載の車両の制御装置。
【0010】
(3)現在と同じ走行シーンで最後に運転復帰練習を実施したときに算出された習熟度に基づいて練習間隔を設定し、現在と同じ走行シーンで最後に運転復帰練習を実施してからの経過時間が練習間隔以上であれば、運転復帰練習を実施するように構成される、上記(1)に記載の車両の制御装置。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大阪瓦斯株式会社
警報装置
8日前
株式会社SUBARU
車載装置
8日前
株式会社大林組
誘導装置
7日前
ニッタン株式会社
煙感知器
8日前
綜合警備保障株式会社
警備システム
7日前
大阪瓦斯株式会社
音声出力システム
8日前
大阪瓦斯株式会社
音声出力システム
8日前
大阪瓦斯株式会社
音声出力システム
8日前
株式会社SUBARU
運転支援装置
7日前
大阪瓦斯株式会社
音声出力システム
8日前
大阪瓦斯株式会社
音声出力システム
8日前
株式会社CCT
監視装置及び監視方法
3日前
ニッタン株式会社
火災感知端末
7日前
株式会社ユピテル
システムおよびプログラム等
7日前
トヨタ車体株式会社
運転支援装置
8日前
マツダ株式会社
興味関心度推定装置
8日前
マツダ株式会社
興味関心度推定装置
8日前
本田技研工業株式会社
データ通信装置
7日前
綜合警備保障株式会社
警備システム及び警備方法
7日前
大作商事株式会社
測定装置及び測定システム
7日前
株式会社SUBARU
車両のすれ違い調停システム
8日前
矢崎総業株式会社
データ処理装置
2日前
能美防災株式会社
火災検出装置
7日前
株式会社IHI
安全支援システム
7日前
セコム株式会社
監視システム
3日前
セコム株式会社
監視システム
3日前
株式会社日立国際電気
火元検知システム
9日前
能美防災株式会社
火災受信機
8日前
能美防災株式会社
火災報知システム
8日前
能美防災株式会社
火災受信機
7日前
能美防災株式会社
火災受信機
8日前
能美防災株式会社
火災受信機
8日前
能美防災株式会社
火災受信機
8日前
能美防災株式会社
火災受信機
8日前
能美防災株式会社
データ提供システム
3日前
スズキ株式会社
車車間通信システム、送信装置及び受信装置
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ