TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024142215
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023054288
出願日
2023-03-29
発明の名称
マスタ装置及び教示システム
出願人
新東工業株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
9/22 20060101AFI20241003BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】スレーブ装置に動作を効率良くかつ高精度に教示すること。
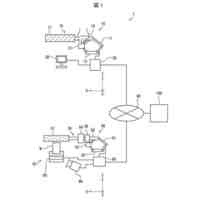
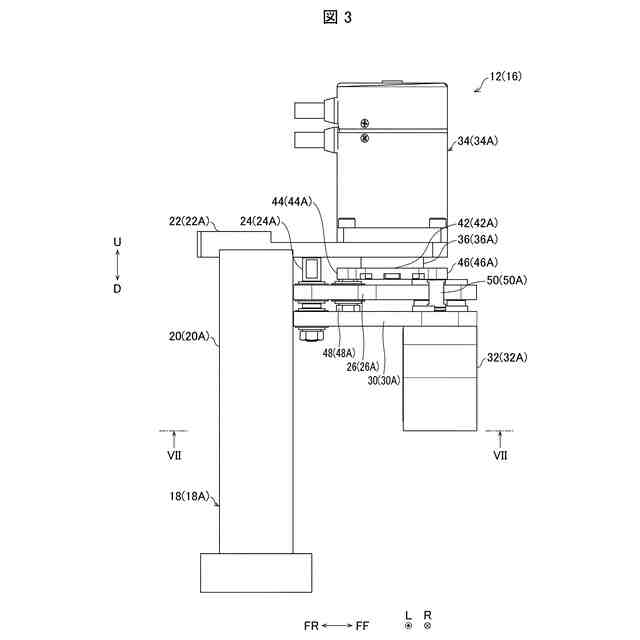
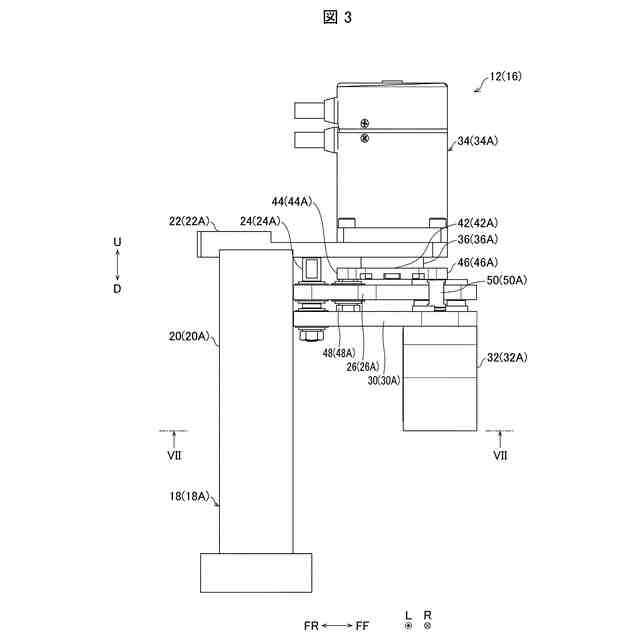
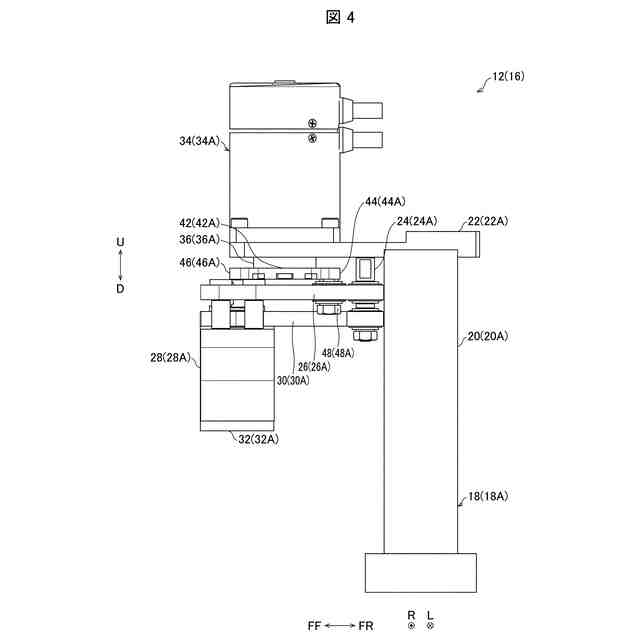
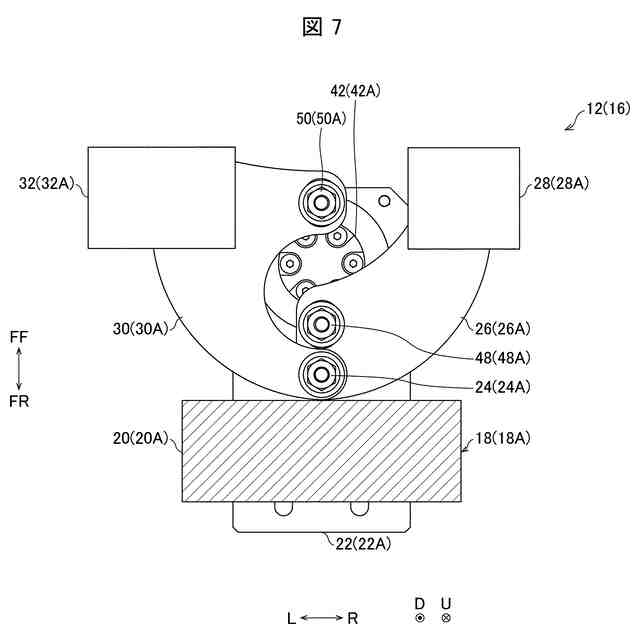
【解決手段】ベース部材(18)に設けられた固定軸(24)に、第1マスタアーム(26)の基端部が旋回可能に連結される。ベース部材(18)に、第1マスタアーム(26)の旋回動作によって回転するロータ(36)を有したマスタモータ(34)設けられる。第1マスタアーム(26)の一部は、ロータ(36)の軸心から偏心した第1部位に第1連結ピン(48)を介して回転自在に連結されている。
【選択図】図3
特許請求の範囲
【請求項1】
ベース部材に設けられた固定軸と、
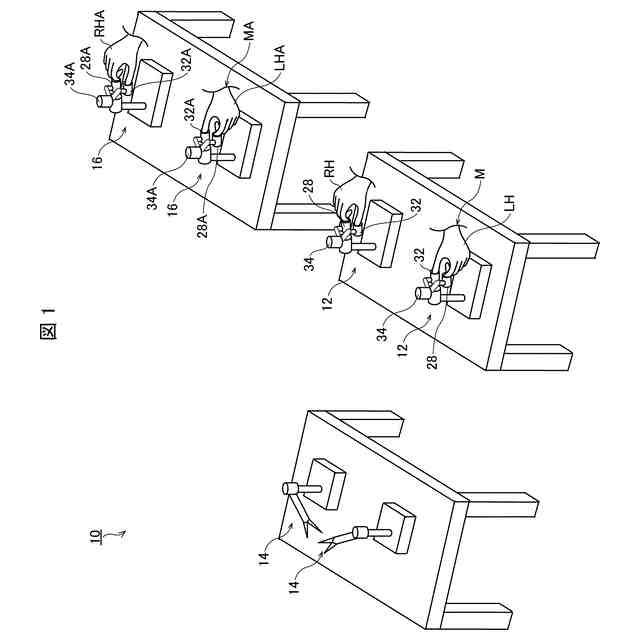
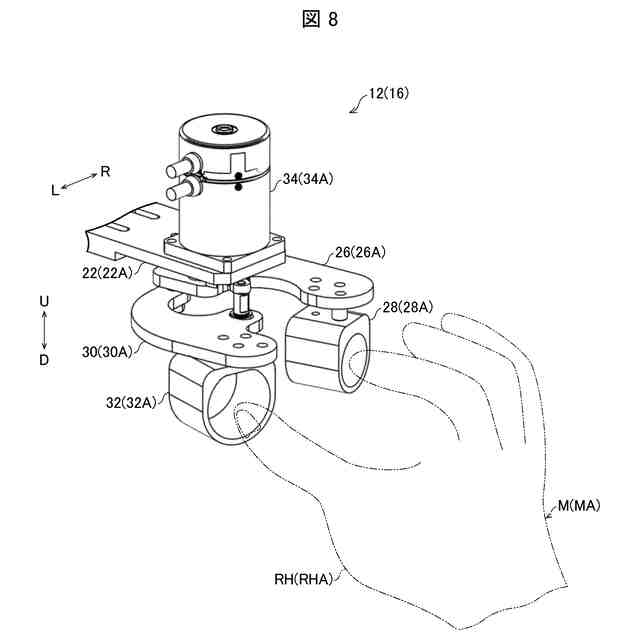
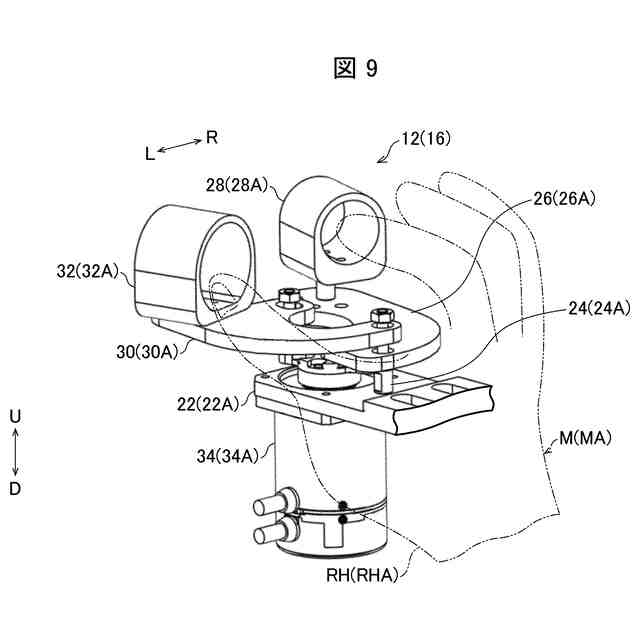
基端部が前記固定軸に旋回可能に連結され、使用者の第1指を挿入するための第1挿入部を有し、使用者の指操作によって旋回し、スレーブ装置に動作を教示するための第1マスタアームと、
前記ベース部材に設けられ、前記第1マスタアームの旋回動作によって回転するロータを有したマスタモータと、を備え、
前記第1マスタアームの一部は、前記ロータの軸心から偏心した第1部位に第1連結ピンを介して回転自在に連結されていることを特徴とするマスタ装置。
続きを表示(約 800 文字)
【請求項2】
前記マスタモータは、ダイレクトドライブモータであることを特徴とする請求項1に記載のマスタ装置。
【請求項3】
基端部が前記固定軸に旋回可能に連結され、使用者の第2指を挿入するための第2挿入部を有し、使用者の指操作によって前記第1マスタアームと同期して旋回し、前記スレーブ装置に動作を教示するための第2マスタアームを更に備え、
前記第2マスタアームの一部は、前記ロータの軸心から偏心した第2部位に第2連結ピンを介して回転自在に連結されていることを特徴とする請求項1に記載のマスタ装置。
【請求項4】
前記第1連結ピン及び前記第2連結ピンは、前記ロータの軸心を中心として180度の回転対称に配置されていることを特徴とする請求項3に記載のマスタ装置。
【請求項5】
請求項1から請求項4のいずれか1項に記載のマスタ装置と、
前記第1マスタアームの旋回動作に応じて動作するスレーブ装置と、
前記第1マスタアームの旋回動作に応じた前記ロータの回転角及び/又はトルクに参照して、前記スレーブ装置の動作を制御する制御部と、を備えることを特徴とする教示システム。
【請求項6】
前記スレーブ装置は、
前記ベース部材に離隔した他のベース部材に設けられた他の固定軸と、
基端部が前記他の固定軸に旋回可能に支持され、他の使用者の第1指を挿入するための他の第1挿入部を有した第1スレーブアームと、
前記他のベース部材に設けられ、前記第1マスタアームの旋回動作に応じて回転する他のロータを有したスレーブモータと、を備え、
前記第1スレーブアームの一部は、前記他のロータの軸心から偏心した部位に他の第1連結ピンを介して回転自在に連結されていることを特徴とする請求項5に記載の教示システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、使用者の指操作可能なマスタ装置及び教示システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
マスタ装置とスレーブ装置とを備えた教示システムは、機械分野、建築分野、医療分野等の様々な分野に用いられている。使用者の指操作が可能なマスタ装置として、特許文献1に示すものがある。その先行技術に係るマスタ装置の構成を簡単に説明すると、次のようになる。
【0003】
先行技術に係るマスタ装置のベース部材(特許文献1ではヘッド部と称される)には、スレーブ装置に動作を教示するためのマスタアーム(特許文献1では操作部と称される)の基端部が揺動軸(特許文献1では操作部の回転軸と称される)を中心として揺動可能に連結されている。揺動軸は、ベース部材に回転自在に支持されており、レバーの基端部に一体的に連結されている。
【0004】
ベース部材には、マスタモータ(特許文献1では第1回転モータと称される)が設けられており、マスタモータは、マスタアームの揺動操作によって回転するロータ(特許文献1では第1回転モータの回転軸と称される)を有している。マスタアームの揺動軸には、主動ギアが一体的に設けられており、マスタモータのロータには、主動ギアに噛合する従動ギアが一体的に設けられている。換言すれば、マスタアームの一部である基端部は、従動ギア及び主動ギアを介してマスタモータのロータに連動連結されている。
【先行技術文献】
【特許文献】
【0005】
特開2019-34002号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、先行技術に係るマスタ装置においては、マスタアームを従動ギア及び主動ギアを介してマスタモータのロータに連動連結されているため、主動ギアと従動ギアとの間のバックラッシュによって、マスタアームとマスタモータのロータとの間で力の伝達にロスが生じたり、マスタアームとマスタモータのロータとの間にガタツキが生じたりする。その結果、マスタ装置によってスレーブ装置に動作を効率良くかつ高精度に教示することが困難になる。
【0007】
そこで、本発明の一態様は、第1マスタアームとマスタモータのロータとの間における力の伝達のロス、及び第1マスタアームとマスタモータのロータとの間のガタツキを無くして、マスタ装置によってスレーブ装置に動作を効率良くかつ高精度に教示することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一態様に係るマスタ装置は、ベース部材に設けられた固定軸と、基端部が前記固定軸に旋回可能に連結され、使用者の第1指を挿入するための第1挿入部を有し、使用者によって旋回操作され、スレーブ装置に動作を教示するための第1マスタアームと、前記ベース部材に設けられ、前記第1マスタアームの旋回動作によって回転するロータを有したマスタモータと、を備える。前記第1マスタアームの一部は、前記ロータの軸心から偏心した第1部位に第1連結ピンを介して回転自在に連結されている。
【0009】
本発明の一態様に係る教示システムは、本発明の一態様に係るマスタ装置と、前記第1マスタアームの旋回動作に応じて動作するスレーブ装置と、前記第1マスタアームの旋回動作に応じた前記ロータの回転角及び/又はトルクに参照して、前記スレーブ装置の動作を制御する制御部と、を備える。
【発明の効果】
【0010】
本発明の一態様によれば、第1マスタアームとマスタモータのロータとの間における力の伝達のロス、及び第1マスタアームとマスタモータのロータとの間のガタツキを無くして、マスタ装置によってスレーブ装置に動作を効率良くかつ高精度に教示することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
新東工業株式会社
集塵機
1か月前
新東工業株式会社
測定装置
2か月前
新東工業株式会社
培養システム
4日前
新東工業株式会社
培養システム
4日前
新東工業株式会社
粉末除去装置
1か月前
新東工業株式会社
力情報表示装置
24日前
新東工業株式会社
植物用光照射装置
今日
新東工業株式会社
センサモジュール
4日前
新東工業株式会社
呼び出しシステム
1か月前
新東工業株式会社
衣服および通知システム
1か月前
新東工業株式会社
管理システム及び管理方法
24日前
新東工業株式会社
ロボットシステム、コントローラ及びロボットシステムの制御方法
11日前
新東工業株式会社
ショットピーニング方法
28日前
個人
腰袋
3日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
11日前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
2か月前
日本車輌製造株式会社
締め付け工具
11日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットアーム
11日前
川崎重工業株式会社
ロボットリスト
11日前
川崎重工業株式会社
ロボットシステム
11日前
学校法人立命館
ロボットハンド
2か月前
CKD株式会社
吸着型搬送装置
25日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
川崎重工業株式会社
塗装ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
ジヤトコ株式会社
圧入装置
24日前
株式会社アイエイアイ
グリッパー
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ