TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025017783
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2023121020
出願日
2023-07-25
発明の名称
ロボットシステム、コントローラ及びロボットシステムの制御方法
出願人
新東工業株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
3/00 20060101AFI20250130BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者等が対象物に実際に作用する力をデータとして把握することが可能なロボットシステムを実現する。
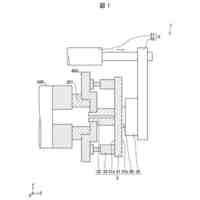
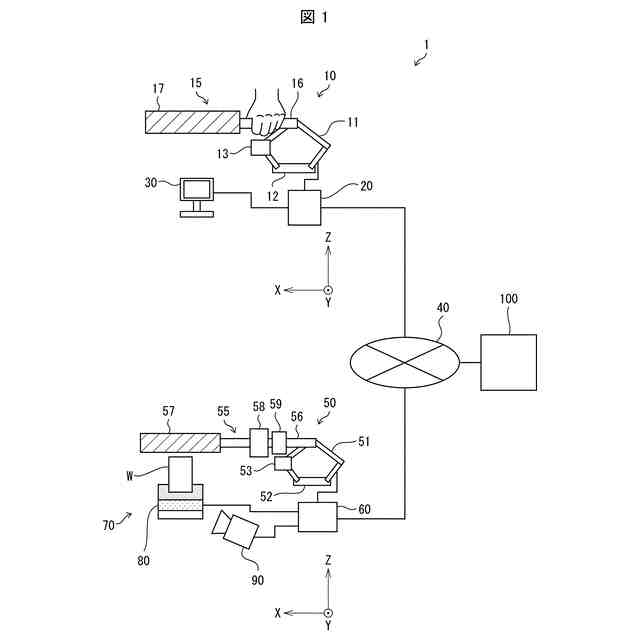
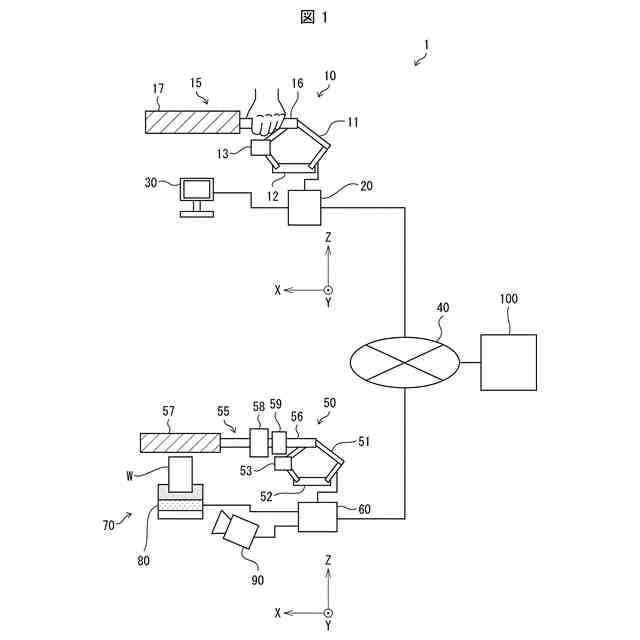
【解決手段】ロボットシステム(1)は、マスターロボット(10)と、スレーブロボット(50)と、力覚センサ(80)と、ディスプレイ(30)と、コントローラ(100)と、を備え、コントローラ(100)は、力覚センサ(80)により検出された反力を示す力データをディスプレイ(30)に表示する表示処理を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
第1リンク機構と、前記第1リンク機構に連結され、作業者により操作される第1ツールと、を有するマスターロボットと、
前記第1リンク機構と相互に動作が同期する第2リンク機構と、前記第2リンク機構に連結され、前記第2リンク機構により駆動される第2ツールと、を有するスレーブロボットと、
前記第2ツールから対象物に作用する力の反力を検出する力覚センサと、
ディスプレイと、
コントローラと、を備え、
前記コントローラは、
前記力覚センサにより検出された反力を示す力データを前記ディスプレイに表示する表示処理を実行する、ロボットシステム。
続きを表示(約 1,000 文字)
【請求項2】
前記第2ツールにより加工される前記対象物を固定する固定部を更に備え、
前記固定部は、前記力覚センサを有する、請求項1に記載のロボットシステム。
【請求項3】
前記第2ツールの角速度を検出する角速度センサ及び前記第2ツールの加速度を検出する加速度センサの一方又は両方を更に備え、
前記コントローラは、前記力データ、及び、前記角速度センサが検出した角速度及び前記加速度センサが検出した加速度の一方又は両方に基づく前記第2ツールの移動状態を示す移動データを前記ディスプレイに表示する、請求項1に記載のロボットシステム。
【請求項4】
前記対象物の加工状態を撮影するカメラを更に備え、
前記コントローラは、前記力データ、及び前記カメラにより撮影された前記加工状態を表す画像をディスプレイに表示する、請求項1に記載のロボットシステム。
【請求項5】
前記コントローラは、前記力覚センサにより検出された力が閾値よりも大きな値であることを作業者に通知する通知処理を更に実行する、請求項1に記載のロボットシステム。
【請求項6】
第1リンク機構と、前記第1リンク機構に連結され、作業者により操作される第1ツールと、を有するマスターロボットと、前記第1リンク機構と相互に動作が同期する第2リンク機構と、前記第2リンク機構に連結され、前記第2リンク機構により駆動される第2ツールと、を有するスレーブロボットと、前記第2ツールから対象物に作用する力の反力を検出する力覚センサと、ディスプレイと、を備えるロボットシステムを制御するコントローラであって、
前記力覚センサにより検出された反力を示す力データを前記ディスプレイに表示する表示処理を実行する、コントローラ。
【請求項7】
第1リンク機構と、前記第1リンク機構に連結され、作業者により操作される第1ツールと、を有するマスターロボットと、前記第1リンク機構と相互に動作が同期する第2リンク機構と、前記第2リンク機構に連結され、前記第2リンク機構により駆動される第2ツールと、を有するスレーブロボットと、前記第2ツールから対象物に作用する力の反力を検出する力覚センサと、ディスプレイと、を備えるロボットシステムの制御方法あって、
前記力覚センサにより検出された反力を示す力データを前記ディスプレイに表示する表示処理を含む、ロボットシステムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットシステム、コントローラ及びロボットシステムの制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、ロボットが対象物に触れた際に生じる力覚及び/又は触覚を、ロボットを遠隔操作する作業者にフィードバックする技術が知られている。例えば、特許文献1には、操作装置により遠隔操作される研削作業用のロボットが記載されている。ロボットアームには、研削する対象物から受ける力及びモーメントを検出する力覚センサが配置されている。力覚センサが検出した力及びモーメントは操作装置にフィードバックされ、操作装置を操作する作業者に作業中のロボットアームに生じる反力等の力を感じさせることができる。
【先行技術文献】
【特許文献】
【0003】
国際公開2021/095886号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のようなロボットでは、力覚センサが検出した力及びモーメントは、作業者が把持する操作装置の把持部にフィードバックされる。このように、作業者は、ロボットアームの状態を作業者の手の感覚から把握することしかできない。そのため、作業者は、ロボットアームから対象物に作用する力を推測することはできるが、実際に対象物に作用している力を把握することはできないという問題がある。
【0005】
本開示の一態様は、作業者等が対象物に実際に作用する力をデータとして把握することが可能なロボットシステムを実現することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本開示の一態様に係るロボットシステムは、第1リンク機構と、前記第1リンク機構に連結され、作業者により操作される第1ツールと、を有するマスターロボットと、前記第1リンク機構と相互に動作が同期する第2リンク機構と、前記第2リンク機構に連結され、前記第2リンク機構により駆動される第2ツールと、を有するスレーブロボットと、前記第2ツールから対象物に作用する力の反力を検出する力覚センサと、ディスプレイと、コントローラと、を備え、前記コントローラは、前記力覚センサにより検出された反力を示す力データを前記ディスプレイに表示する表示処理を実行する。
【0007】
上記の課題を解決するために、本開示の一態様に係るコントローラは、第1リンク機構と、前記第1リンク機構に連結され、作業者により操作される第1ツールと、を有するマスターロボットと、前記第1リンク機構と相互に動作が同期する第2リンク機構と、前記第2リンク機構に連結され、前記第2リンク機構により駆動される第2ツールと、を有するスレーブロボットと、前記第2ツールから対象物に作用する力の反力を検出する力覚センサと、ディスプレイと、を備えるロボットシステムを制御するコントローラであって、前記力覚センサにより検出された反力を示す力データを前記ディスプレイに表示する表示処理を実行する。
【0008】
上記の課題を解決するために、本開示の一態様に係るロボットシステムの制御方法は、第1リンク機構と、前記第1リンク機構に連結され、作業者により操作される第1ツールと、を有するマスターロボットと、前記第1リンク機構と相互に動作が同期する第2リンク機構と、前記第2リンク機構に連結され、前記第2リンク機構により駆動される第2ツールと、を有するスレーブロボットと、前記第2ツールから対象物に作用する力の反力を検出する力覚センサと、ディスプレイと、を備えるロボットシステムの制御方法あって、前記力覚センサにより検出された反力を示す力データを前記ディスプレイに表示する表示処理を含む。
【発明の効果】
【0009】
本開示の一態様によれば、作業者等が対象物に実際に作用する力をデータとして把握することが可能なロボットシステムを実現することができる。
【図面の簡単な説明】
【0010】
本開示の実施形態1に係るロボットシステムの一例を示す概略図である。
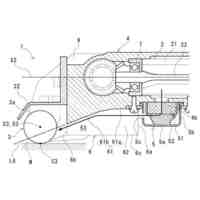
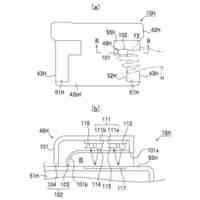
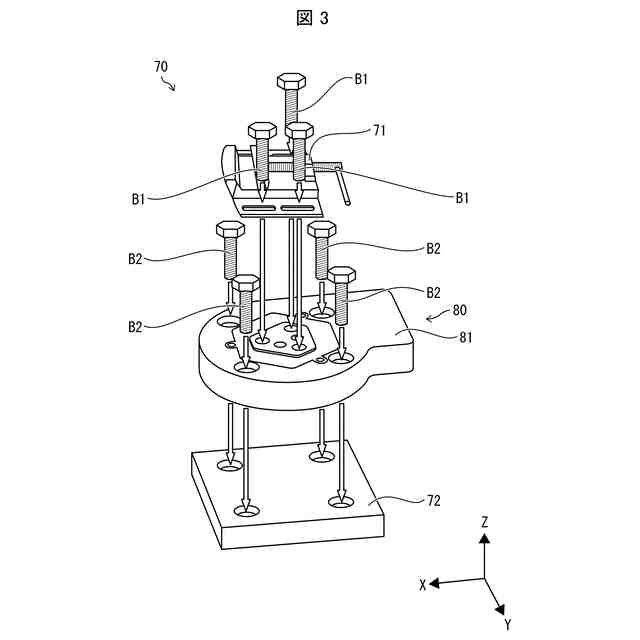
図1に示す固定部の構成を示す模式図である。
図1に示す固定部の構成を示す分解斜視図である。
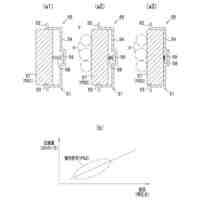
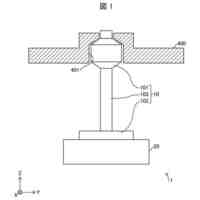
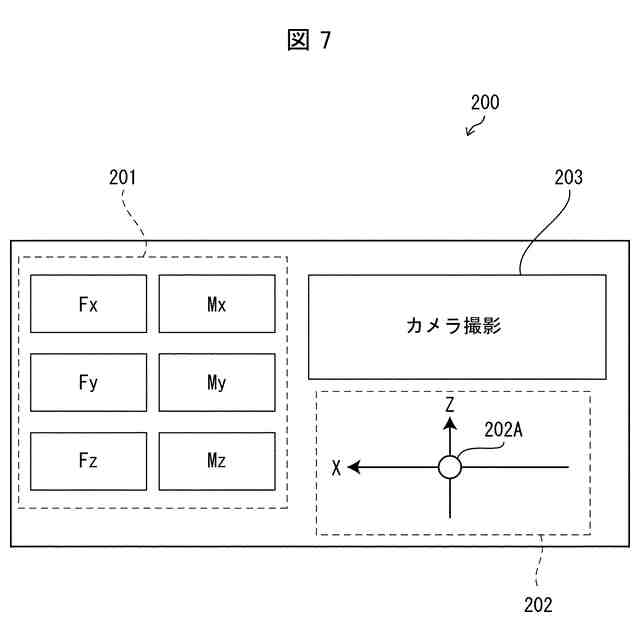
固定部が有する力覚センサが検出するパラメータについて説明する図である。
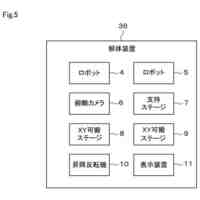
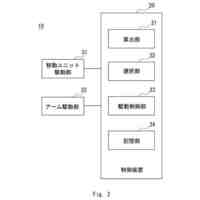
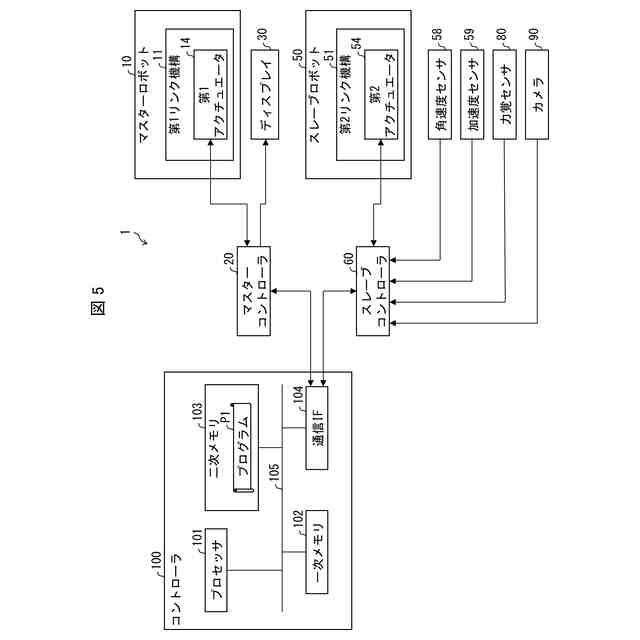
本開示の実施形態1に係るロボットシステムに含まれる各部の内部構成を示すブロック図である。
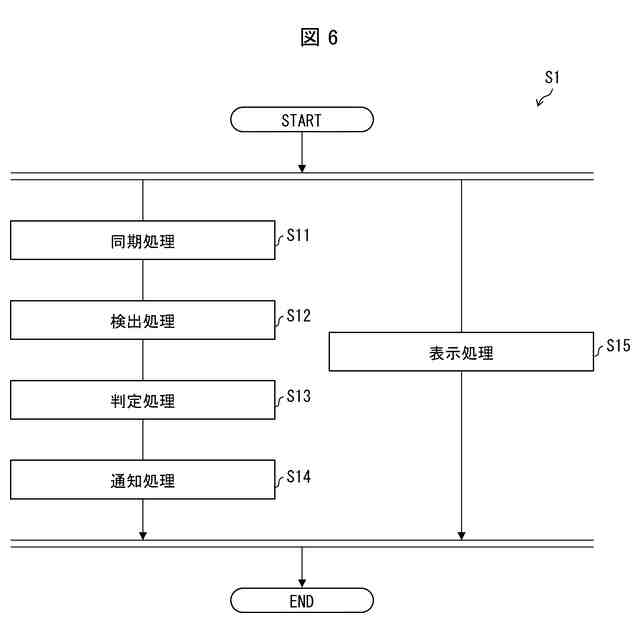
図5に示すコントローラが実施する制御方法の流れを示すフロー図である。
表示処理において表示される表示画面の一例を示す図である。
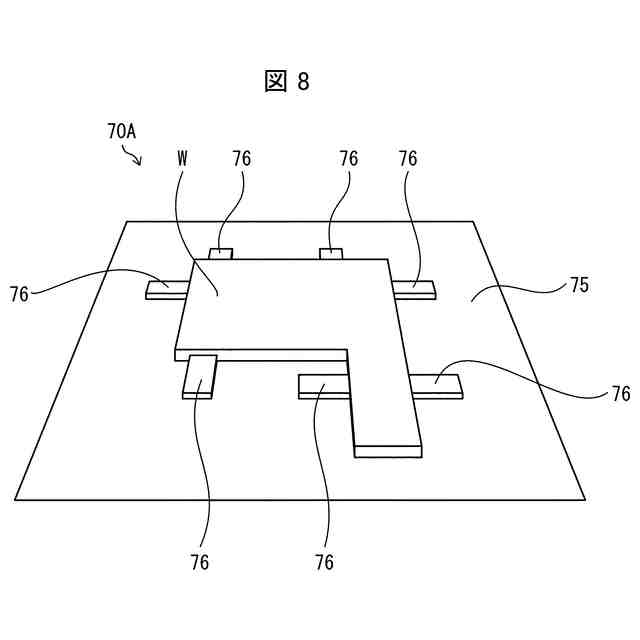
実施形態1に係るロボットシステムの固定部の変形例を示す外観斜視図である。
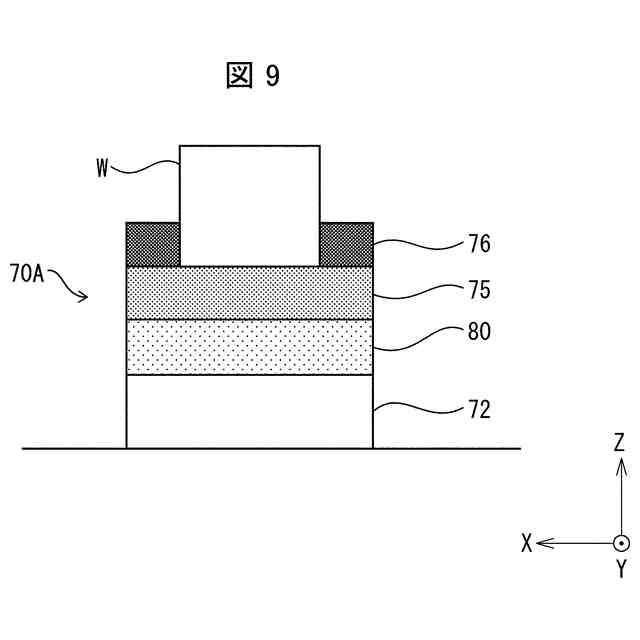
図8に示す固定部の構成を示す模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
新東工業株式会社
搬送装置及びこれを用いた搬送方法
16日前
新東工業株式会社
装着装置、装着方法及び製品の製造方法
3日前
新東工業株式会社
検査装置、検査方法及びディスクブレーキプレートの製造方法
3日前
川崎重工業株式会社
ハンド
25日前
個人
けがき用治具
19日前
株式会社不二越
ロボット
17日前
株式会社不二越
ロボット操作装置
16日前
個人
深孔スリーブ駆動ロッド構造
9日前
川崎重工業株式会社
ロボット
17日前
株式会社黒澤鉄工製作所
けがき用治具
19日前
川崎重工業株式会社
ロボットシステム
25日前
個人
バール
9日前
工機ホールディングス株式会社
作業機
4日前
株式会社デンソー
操縦桿
17日前
梅馨堂合同会社
人協働ロボットシステム
11日前
株式会社不二越
基板搬送用ロボット
26日前
ARMA株式会社
UI付エンドエフェクタ
12日前
株式会社デンソーウェーブ
ロボット制御システム
2日前
株式会社マキタ
作業機
16日前
学校法人法政大学
装着型アシスト装置
6日前
若井ホールディングス株式会社
レンチ構造とその製造方法
19日前
三菱電機株式会社
トルク締め個所検出システム
9日前
高丸工業株式会社
ロボット操作システムの動作方法
9日前
シブヤパッケージングシステム株式会社
物品移載装置
17日前
株式会社不二越
ロボットの教示システム及び教示方法
3日前
中国電力株式会社
電動ドライバー
3日前
株式会社デンソー
解体装置および解体プログラム
17日前
株式会社ベッセル工業
インパクト工具
17日前
株式会社デンソー
作業装置および作業プログラム
17日前
JUKI株式会社
ハンドリング装置
11日前
オムロン株式会社
モバイルロボット
3日前
不二空機株式会社
エアツール及びエアツールの使用方法
25日前
オムロン株式会社
モバイルロボット
3日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
3日前
学校法人 名古屋電気学園
制御システム
23日前
株式会社デンソーウェーブ
ロボット用操作端末及び安全スイッチ
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ