TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024142175
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023054221
出願日
2023-03-29
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/26 20060101AFI20241003BHJP(水工;基礎;土砂の移送)
要約
【課題】検知範囲外に移動した周囲作業者が再び検知範囲内に近づく可能性を、オペレータに対し継続して認識させる。
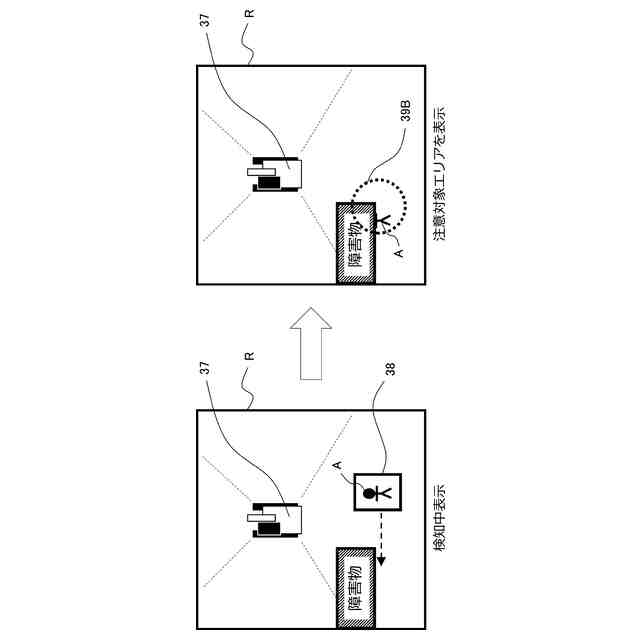
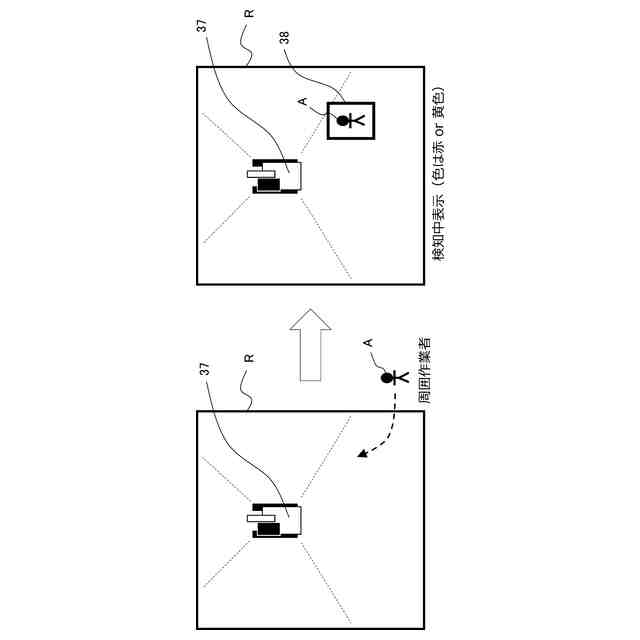
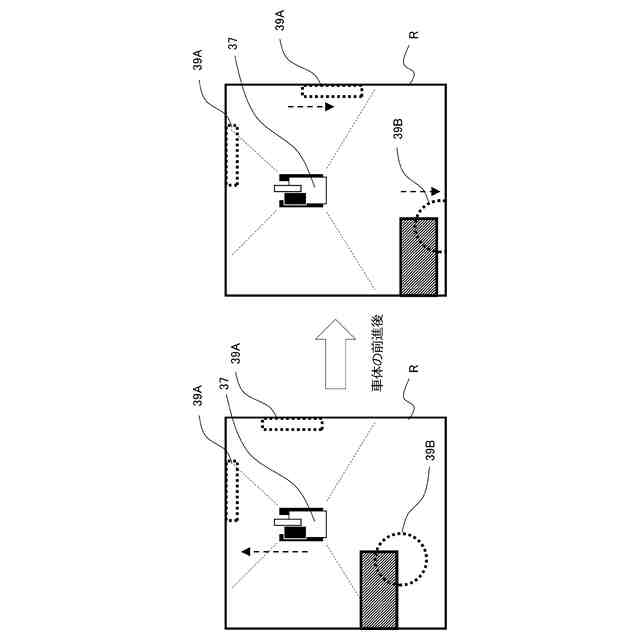
【解決手段】画像処理コントローラ28は、俯瞰映像に設定された検知エリアR(検知範囲)内に周囲作業者を検知したか否かを判定し、検知エリアR内に周囲作業者を検知した場合には、検知マーク座標(周囲作業者を検知した座標)を記憶し、検知エリアR内において検知マーク座標(座標)に対応する位置に検知マーク38(第1マーク)を表示させ、検知エリアR内に周囲作業者を検知している状態から周囲作業者を検知しなくなった場合には、周囲作業者を検知しなくなる直前の座標を記憶し、検知エリアR内において直前の座標に対応する位置に検知マーク38とは異なる注意マーク39(第2マーク)を表示させる。
【選択図】図8
特許請求の範囲
【請求項1】
周囲の画像を撮像する複数の撮像装置と、
前記複数の撮像装置により撮像された画像に基づいて、俯瞰映像を作成する画像処理装置と、
前記俯瞰映像を表示する表示装置と、を備えた作業機械において、
前記画像処理装置は、
前記俯瞰映像に設定された検知範囲内に周囲作業者を検知したか否かを判定し、
前記検知範囲内に前記周囲作業者を検知した場合には、前記周囲作業者を検知した座標を記憶し、前記検知範囲内において前記座標に対応する位置に第1マークを表示させ、
前記検知範囲内に前記周囲作業者を検知している状態から前記周囲作業者を検知しなくなった場合には、前記周囲作業者を検知しなくなる直前の座標を記憶し、前記検知範囲内において前記直前の座標に対応する位置に前記第1マークとは異なる第2マークを表示させる、ことを特徴とする作業機械。
続きを表示(約 910 文字)
【請求項2】
請求項1に記載の作業機械において、
前記画像処理装置は、前記作業機械の動作に追従するように、前記第2マークを表示可能である、ことを特徴とする作業機械。
【請求項3】
請求項1または請求項2に記載の作業機械において、
前記画像処理装置は、オペレータの操作に基づいて、前記第2マークを消去可能である、ことを特徴とする作業機械。
【請求項4】
請求項1または請求項2に記載の作業機械において、
前記画像処理装置は、前記第2マークの表示範囲内において前記周囲作業者を検知した場合には、前記第2マークを消去して前記第1マークを表示可能である、ことを特徴とする作業機械。
【請求項5】
請求項1または請求項2に記載の作業機械において、
前記画像処理装置は、前記第2マークの表示時間を計測し、前記第2マークの表示時間が所定時間に達した場合には、前記第2マークを自動で消去可能である、ことを特徴とする作業機械。
【請求項6】
請求項3に記載の作業機械において、
前記画像処理装置は、前記第2マークの消去中において、前記検知範囲内に前記周囲作業者を検知した場合には、前記第2マークの消去を中断して前記第1マークを表示可能である、ことを特徴とする作業機械。
【請求項7】
請求項1または請求項2に記載の作業機械において、
前記画像処理装置は、前記周囲作業者が前記検知範囲内から前記検知範囲外に移動したことに基づいて前記周囲作業者を検知しなくなった場合と、前記周囲作業者が前記検知範囲内で前記周囲作業者を検知しなくなった場合と、で異なる表示態様の前記第2マークを表示可能である、ことを特徴とする作業機械。
【請求項8】
請求項3に記載の作業機械において、
前記画像処理装置は、前記第2マークの表示時間または表示開始時刻に関する情報を記憶し、前記第2マークを表示している所定タイミングで前記第2マークの表示時間または表示開始時刻を表示可能である、ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、周囲作業者の接近を検知する作業機械に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
作業機械と周囲作業者との接触リスクを低減させる手法としては、カメラやセンサを用いて周囲作業者の接近をオペレータに通知する手法が知られており、通知手段として、モニタに表示する周囲映像へのマーキング表示、およびブザーなどの警告音が用いられる。
【0003】
作業中のオペレータは、基本的に作業対象を注視しているため、警告音を聞いてからモニタを見て接近する周囲作業者を確認することになる。そのため、オペレータがモニタで確認した時点で周囲作業者がセンサの検知範囲外や死角に移動して非検知状態となっていた場合、オペレータはどのあたりに周囲作業者が存在していたのかを認識できない場合があった。
【0004】
過去の検知情報をオペレータに通知する手段としては、例えば特許文献1のように、一定の間隔で撮影したカメラ映像をモニタ上で重ね合わせて表示することで、その映像の差分から周囲作業者などが接近していた場所を示す装置が知られている。
【先行技術文献】
【特許文献】
【0005】
特開2021-22804号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の先行技術の手段を用いることで、周囲作業者が検知範囲外に外れた際にもこの周囲作業者が接近していた事実をオペレータに認識させることが可能となる。しかしながら、特許文献1に記載された技術では、一度検知された周囲作業者が、検知範囲外の近場で作業し続けた場合に、再び検知範囲内に近づく可能性を考慮した表示とはなっていないため、オペレータに対し、周囲作業者が近場で作業していることを継続して認識させられない可能性がある。
【0007】
本発明は、このような実状に鑑みてなされたものであり、その目的は、検知範囲外に移動した周囲作業者が再び検知範囲内に近づく可能性を、オペレータに対し継続して認識させることができる作業機械を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の一態様は、周囲の画像を撮像する複数の撮像装置と、前記複数の撮像装置により撮像された画像に基づいて、俯瞰映像を作成する画像処理装置と、前記俯瞰映像を表示する表示装置と、を備えた作業機械において、前記画像処理装置は、前記俯瞰映像に設定された検知範囲内に周囲作業者を検知したか否かを判定し、前記検知範囲内に前記周囲作業者を検知した場合には、前記周囲作業者を検知した座標を記憶し、前記検知範囲内において前記座標に対応する位置に第1マークを表示させ、前記検知範囲内に前記周囲作業者を検知している状態から前記周囲作業者を検知しなくなった場合には、前記周囲作業者を検知しなくなる直前の座標を記憶し、前記検知範囲内において前記直前の座標に対応する位置に前記第1マークとは異なる第2マークを表示させる、ことを特徴とする。
【発明の効果】
【0009】
本発明によれば、検知範囲外に移動した周囲作業者が再び検知範囲内に近づく可能性を、オペレータに対し継続して認識させることができる。なお、上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
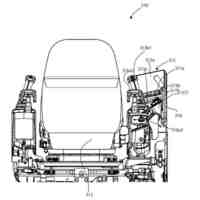
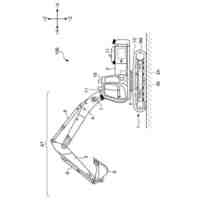
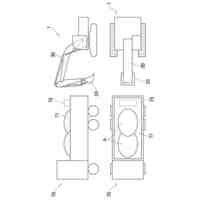
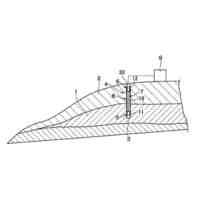
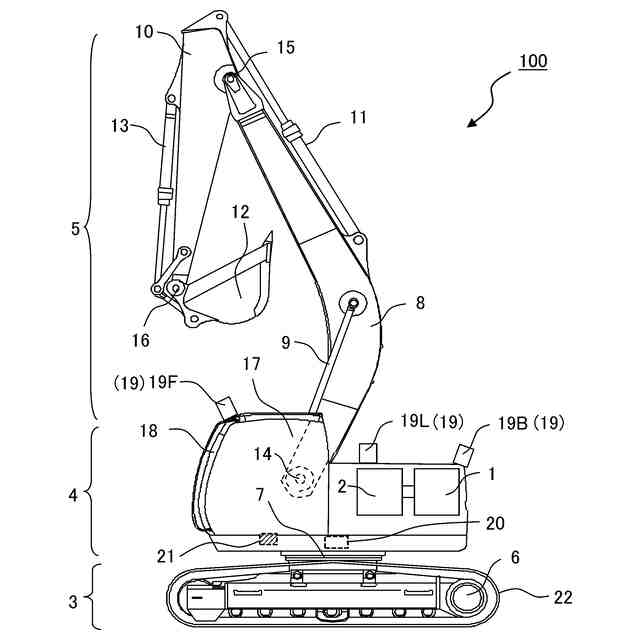
本発明の実施形態となる、物体検知および警報システムを備えた建設機械を側面から見た図である。
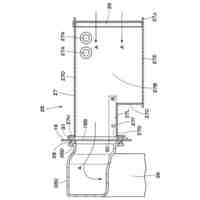
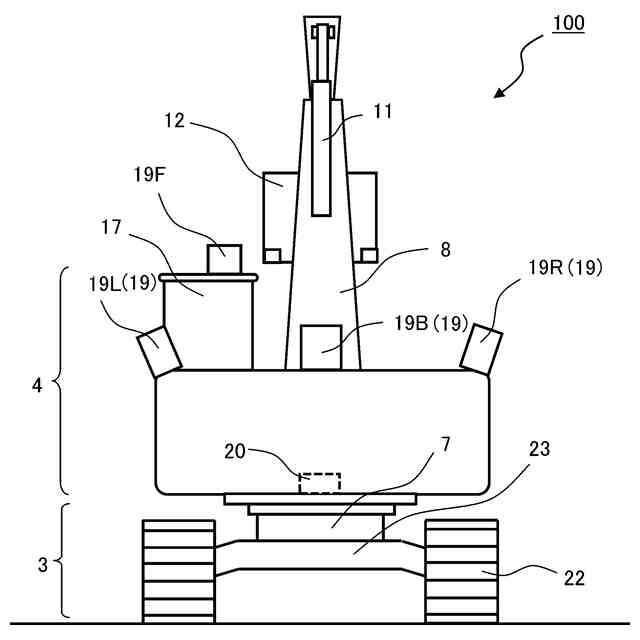
本発明の実施形態となる、物体検知および警報システムを備えた建設機械を後方から見た図である。
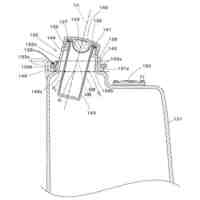
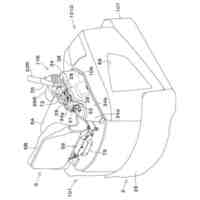
本発明の実施形態となる、物体検知および警報システムを備えた建設機械のキャビン部を示した図である。
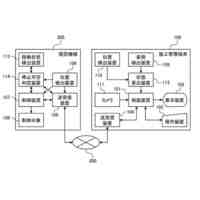
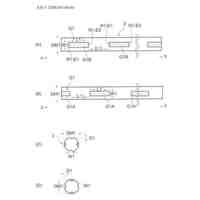
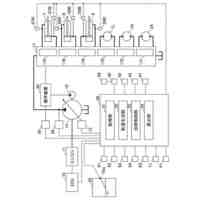
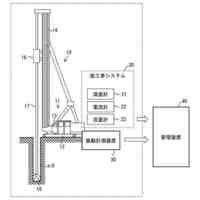
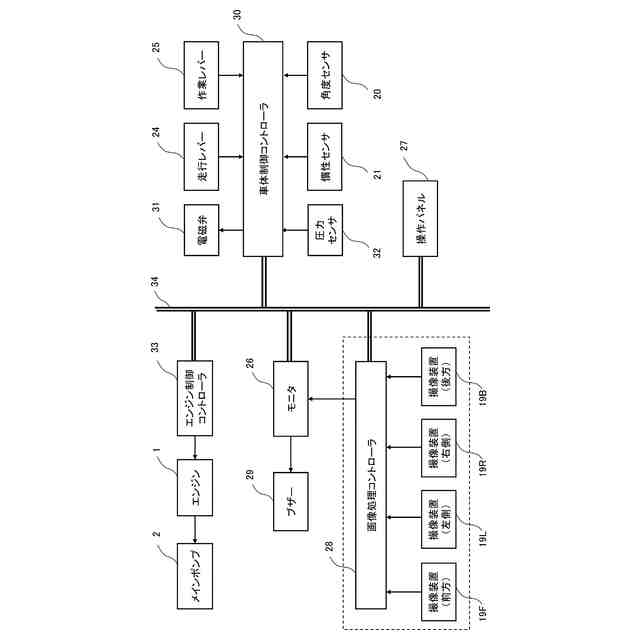
本発明の実施形態に係る概略システム構成図である。
モニタの画面表示構成を示す図である。
周囲作業者の接近を検知した時の検知状態の表示例を示す図である。
本発明の特徴となる、周囲作業者が検知エリア内から検知エリア外に移動した場合のマーキングの表示例を示す図である。
本発明の特徴となる、周囲作業者が検知エリア内において非検知となった場合のマーキングの表示例を示す図である。
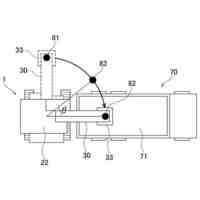
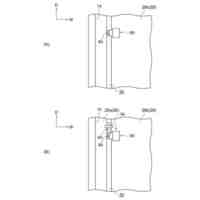
本発明の特徴となる、作業機械が移動した際のマーキング表示の描画について示す図である。
本発明の特徴となる、作業機械が旋回した際のマーキング表示の描画について示す図である。
マーキング表示を消去する際の、モニタ画面でのメニュー操作の一例を示す図である。
マーキング表示を選択して消去する場合の、モニタ画面での操作の一例を示す図である。
マーキング表示を全て消去する場合の、モニタ画面での操作の一例を示す図である。
マーキング表示の範囲内にて、周囲作業者を再検知した場合にマーキング表示を消去する際のモニタ画面表示を示す図である。
作業機械が移動した際に、画面外に移動したマーキング表示が消去される際のモニタ画面表示を示す図である。
画像処理コントローラによるモニタの画面表示処理を示すフローチャートである。
注意マーク座標更新処理を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
25日前
日立建機株式会社
建設機械の動作制御システム
1か月前
個人
エア津波緩衝装置
1か月前
個人
指示装置
1か月前
株式会社大林組
建築物
1日前
株式会社クボタケミックス
桝蓋
1か月前
住友建機株式会社
ショベル
1か月前
株式会社ジェック
水流方向切替装置
3日前
株式会社クボタ
作業機
1日前
コベルコ建機株式会社
作業機械
1か月前
株式会社クボタ
作業機
1日前
ヤンマーホールディングス株式会社
作業機械
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
住友重機械工業株式会社
作業機械
1か月前
個人
鋼管杭とその製造方法
1か月前
住友重機械工業株式会社
ショベル
1日前
住友重機械工業株式会社
ショベル
1日前
住友重機械工業株式会社
作業機械
10日前
鹿島建設株式会社
建込み方法
23日前
コベルコ建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
1か月前
大和ハウス工業株式会社
建物の建設方法
1日前
日鉄建材株式会社
透過型砂防堰堤の設計方法
3日前
ヤンマーホールディングス株式会社
作業機械
1か月前
日本製鉄株式会社
堤防
1日前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
1か月前
個人
アンカーボルト支持装置
1か月前
住友重機械工業株式会社
作業機械の制御装置
1か月前
スーパーレジンクラフト株式会社
防塵板付消波装置
1か月前
日立建機株式会社
作業車両
25日前
三陽機器株式会社
作業機の作業部連結構造
25日前
一般財団法人電力中央研究所
地盤の状況計測装置
1日前
株式会社日立建機ティエラ
建設機械
3日前
株式会社大林組
判定支援システム及び判定支援方法
1日前
株式会社竹中工務店
山留め工法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ