TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024140940
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023052319
出願日
2023-03-28
発明の名称
ロボット制御システム
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
19/06 20060101AFI20241003BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】産業用ロボットの安全性の向上に寄与すること。
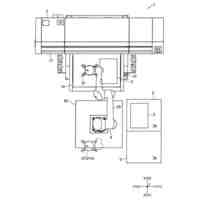
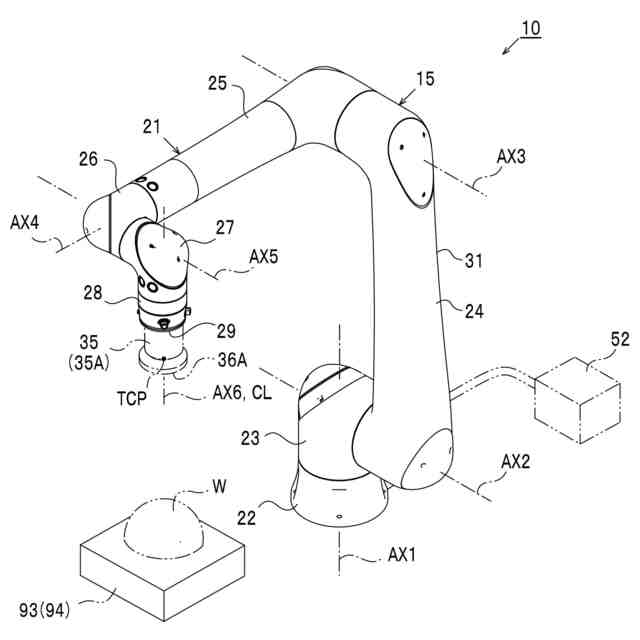
【解決手段】ロボット15は、複数の関節部を有するアーム31を備えており、当該アーム31のフランジ部28にはエンドエフェクタ35が装着されている。アーム31の各関節部には、駆動部としてのサーボモータとそれらサーボモータに付属のロータリエンコーダとが配設されており、それらサーボモータ及びロータリエンコーダはロボット15の制御システムの中核を担うロボットコントローラ52に接続されている。ロボットコントローラ52の監視部は、それらロータリエンコーダから取得したエンコーダ値に基づいて、ベース座標系から見たフランジ部28の向き、すなわち第6軸AX6の向きを特定し、特定したフランジ部28の向きが、ユーザにより指定された範囲内になっているかを監視する。
【選択図】 図1
特許請求の範囲
【請求項1】
複数の関節部が形成されたアームと、それら関節部を各々駆動させる駆動部とを有する産業用ロボットに適用されるロボット制御システムであって、
前記産業用ロボットの手先の向きを特定する向き特定部と、
前記産業用ロボットの手先の向きの許容範囲を設定する設定部と、
前記向き特定部により特定された前記手先の実際の向きが前記許容範囲内となっているか監視する監視部と
を備えているロボット制御システム。
続きを表示(約 870 文字)
【請求項2】
複数の関節部が形成されたアームと、それら関節部を各々駆動させる駆動部とを有する産業用ロボットに適用されるロボット制御システムであって、
前記産業用ロボットについて監視の基準となる前記アームの先端部の向きを設定する向き設定部と、
前記アームの先端部の向きを特定する向き特定部と、
前記向き設定部により設定された基準の向きと前記向き特定部により特定される実際の向きとの偏差について上限を設定する上限設定部と、
前記偏差が前記上限を超えた場合に所定の制御処理を実行する制御部と
を備えているロボット制御システム。
【請求項3】
複数の関節部が形成されたアームと、それら関節部を各々駆動させる駆動部とを有する産業用ロボットに適用されるロボット制御システムであって、
前記アームは、当該アームの先端部に、エンドエフェクタを装着可能となっており、
前記産業用ロボットについて監視の基準となる前記エンドエフェクタの向きを設定する向き設定部と、
前記エンドエフェクタの向きを特定する向き特定部と、
前記向き設定部により設定された基準の向きと前記向き特定部により特定される実際の向きとの偏差について上限を設定する上限設定部と、
前記偏差が前記上限を超えた場合に所定の制御処理を実行する制御部と
を備えているロボット制御システム。
【請求項4】
前記所定の制御処理は、前記アームを停止させる停止処理を含み、
前記産業用ロボットの手先の移動速度を特定する速度特定部と、
前記産業用ロボットが動作を継続した場合に、前記偏差が前記上限を超えるかを前記速度特定部により特定された前記移動速度に基づいて推定する推定部と、
前記推定部により前記偏差が前記上限を超えると推定された場合に、前記アームを減速させるべく減速処理を実行する減速処理実行部を備えている請求項2又は請求項3に記載のロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御システムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
産業用ロボットに適用されるロボット制御システムには、例えば駆動中のロボット(具体的には手先や各軸)の速度や位置を監視し、安全用の基準を外れるような動きとなった場合にロボットを強制的に停止させる機能(所謂防護停止)を有しているものがある(例えば特許文献1、特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
特開平1-16395号公報
特開平3-37701号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、ロボットに装着されるエンドエフェクタは、ロボットが従事する作業に応じて様々となる(例えばハンド、切削装置、研磨装置、レーザ装置、噴霧器等)。装着されるエンドエフェクタによっては、ロボットの手先の姿勢(手先の向き)によってロボットの安全性に差が生じ得る。例えばエンドエフェクタとして研磨装置が装着されている場合には、研磨用のディスク(特に研磨面)がロボット周辺に設けられた人の作業エリア側を向くことにより、人がエンドエフェクタの刃部等に誤って触れる可能性が高くなると懸念される。このような懸念については、上述の如く速度や位置を監視したとしても解消することは困難である。
【0005】
このように、ロボットの安全性の更なる向上を図る上で、ロボット制御システムに係る構成には未だ改善の余地がある。
【0006】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、産業用ロボットの安全性の向上に寄与することにある。
【課題を解決するための手段】
【0007】
以下、上記課題を解決するための手段について記載する。
【0008】
第1の手段.複数の関節部(第1関節部~第6関節部)が形成されたアーム(アーム31)と、それら関節部を各々駆動させる駆動部(サーボモータ45)とを有する産業用ロボット(ロボット15)に適用されるロボット制御システム(制御システムCS)であって、
前記産業用ロボットの手先(フランジ部28又はエンドエフェクタ35)の向きを特定する向き特定部(監視部56において実姿勢を特定する機能)と、
前記産業用ロボットの手先の向きの許容範囲を設定する設定部(上位コントローラ51における設定機能)と、
前記向き特定部により特定された前記手先の実際の向きが前記許容範囲内となっているか監視する監視部(ロボットコントローラ52の監視部56)と
を備えている。
【0009】
独立して動作する複数の関節部が形成されたアームを備える産業用ロボットについては動きの自由度が高いため、様々な作業に従事させることができる。一方、自由度が高いが故に、産業用ロボットの手先の位置が同じであっても、当該手先の向きが必ずしも一致するとは限らない。例えば、特定の位置へ手先を移動させる場合であっても、その過程等が異なれば、特定の位置へ到達した手先の向きについても異なる可能性がある。例えば、産業用ロボットの周辺に人の作業エリアが設けられている場合には、手先が当該作業エリアを向くことで作業者が手先に接触する可能性が高くなると懸念される。また、例えば手先が作業エリアに向いている状況下にて当該手先を構成するレーザ装置や噴霧器等のエンドエフェクタが誤作動すると、作業エリアに向けてレーザ等が射出されるといった不都合が生じ得る。産業用ロボットの制御システムには手先の位置を監視する位置監視や手先の移動速度を監視する速度監視等の機能を有しているものもあるが、それら位置監視や速度監視では上記不都合の発生を抑制することは困難である。この点、本手段に示す構成では、産業用ロボットの手先の向きの許容範囲が設定され、手先の向きが当該許容範囲内となっているか監視される。このような構成とすれば、手先が上述した作業エリア(特に作業者)等の好ましくない方向を向くことを抑制し、上記不都合の発生を抑えることができる。これは、産業用ロボットの安全性の更なる向上を図る上で好ましい。
【0010】
第2の手段.複数の関節部(第1関節部~第6関節部)が形成されたアーム(アーム31)と、それら関節部を各々駆動させる駆動部(サーボモータ45)とを有する産業用ロボット(ロボット15)に適用されるロボット制御システム(制御システムCS)であって、
前記産業用ロボットについて監視の基準となる前記アームの先端部(フランジ部28)の向きを設定する向き設定部(上位コントローラ51における基準姿勢RX~基準姿勢RZの設定機能)と、
前記アームの先端部の向きを特定する向き特定部(監視部56において実姿勢を特定する機能)と、
前記向き設定部により設定された基準の向きと前記向き特定部により特定される実際の向きとの偏差について上限を設定する上限設定部(上位コントローラ51における許容角度α等の設定機能)と、
前記偏差が前記上限を超えた場合に所定の制御処理(例えば、防護停止処理、異常報知処理)を実行する制御部(監視部56)と
を備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
12日前
株式会社エビス
連結具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
20日前
株式会社マキタ
電動工具
5日前
川崎重工業株式会社
ロボットアーム
20日前
川崎重工業株式会社
ロボットアーム
20日前
日本車輌製造株式会社
締め付け工具
20日前
川崎重工業株式会社
ロボットリスト
20日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボットシステム
20日前
日本信号株式会社
作業機制御システム
5日前
CKD株式会社
吸着型搬送装置
1か月前
長堀工業株式会社
締結装置
1か月前
川崎重工業株式会社
塗装ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
6日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社マキタ
集塵アタッチメント
5日前
株式会社スター精機
ワーク搬送装置
9日前
モトコマ株式会社
寄せポンチホルダー
21日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
川崎重工業株式会社
ロボットシステム
12日前
トヨタ自動車株式会社
制御装置及び制御方法
20日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
工機ホールディングス株式会社
電気機器
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ