TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024136278
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023047354
出願日
2023-03-23
発明の名称
ロボット
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20240927BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アームカバーを着脱する際の操作性、放熱性および作業中の安全性を両立することができるロボットを提供すること。
【解決手段】基台と、基台に対し第1回転軸の回りに回転可能に接続される第1アームと、第1アームに対し第1回転軸と平行な第2回転軸の回りに回転可能に接続され、アームベースと、前記アームベースの上部を覆うアームカバーと、を有する第2アームと、第2アームを回転させる駆動部と、を備え、アームカバーは、アームベースの側面のうち駆動部に対応する部分に少なくとも設けられる被覆部を有し、第1アームは、第1アームの先端部に設けられ、上方に行くに従って第2回転軸との距離が大きくなるよう傾斜する第1傾斜部を有し、被覆部は、被覆部の少なくとも基端部に設けられ、下方に行くに従って第2回転軸との距離が大きくなるよう傾斜する第2傾斜部を有するロボット。
【選択図】図2
特許請求の範囲
【請求項1】
基台と、
前記基台に対し第1回転軸の回りに回転可能に接続される第1アームと、
前記第1アームの先端部に、前記第1アームに対し前記第1回転軸と平行な第2回転軸の回りに回転可能に接続され、アームベースと、前記アームベースの上部を覆うアームカバーと、を有する第2アームと、
前記アームベースの前記第2回転軸上に配置され、前記第2アームを回転させる駆動部と、を備え、
前記アームカバーは、前記アームベースの側面のうち前記駆動部に対応する部分に少なくとも設けられる被覆部を有し、
前記第1アームは、前記第1アームの先端部に設けられ、上方に行くに従って前記第2回転軸との距離が大きくなるよう傾斜する第1傾斜部を有し、
前記被覆部は、前記被覆部の少なくとも基端部に設けられ、下方に行くに従って前記第2回転軸との距離が大きくなるよう傾斜する第2傾斜部を有することを特徴とするロボット。
続きを表示(約 570 文字)
【請求項2】
前記第1傾斜部と前記第2傾斜部とは、前記第2回転軸に対する傾斜方向が同じである部分を有する請求項1に記載のロボット。
【請求項3】
前記第1傾斜部と前記第2傾斜部とは、前記第2回転軸に対する傾斜角度が同じである部分を有する請求項2に記載のロボット。
【請求項4】
前記第2傾斜部は、前記被覆部の前記第2回転軸方向における全域にわたって設けられている請求項1ないし3のいずれか1項に記載のロボット。
【請求項5】
前記第1アームの先端部は、前記第1傾斜部と、前記第1傾斜部の上方に隣接し、前記第2回転軸方向に沿った端部と、を有する請求項1ないし3のいずれか1項に記載のロボット。
【請求項6】
前記第1アームの先端部は、前記第1傾斜部と、前記第1傾斜部の下方に隣接し、前記第2回転軸方向に沿った端部と、を有する請求項1ないし3のいずれか1項に記載のロボット。
【請求項7】
前記被覆部は、柔軟性を有する材料で構成されている請求項1ないし3のいずれか1項に記載のロボット。
【請求項8】
前記第1アームは、前記駆動部が設置され、前記第1アーム側に開放する開放部を有する請求項1ないし3のいずれか1項に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、各種のロボットを用いてワークに対し搬送、加工、組立および検査等の所望の作業を行い、作業の迅速化、効率化が図られている。
【0003】
特許文献1に記載されているロボットは、基台と、基台に対し、第1回転軸回りに回転可能に接続される第1アームと、第1アームに対し、第1回転軸と平行な第2回転軸回りに回転可能に接続される第2アームと、第2アームに支持される作業ヘッドと、を備える。また、第2アームは、アームベースと、アームベース上に設置され、モーター、減速機等で構成される駆動部と、アームベースに対し着脱可能に装着されるアームカバーと、を有する。アームカバーは、アームベース上に設置された駆動部やその他の駆動系を覆うように、アームベースに装着される。そして、第2アームのアームベース上に設置された駆動部やその他の駆動系等を点検、修理する際には、アームベースからアームカバーを離脱させる作業が行われる。
【先行技術文献】
【特許文献】
【0004】
特開2018-130796号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されているロボットでは、アームカバーがアームベースの駆動部に対応する部分を覆うためアームカバーとアームベースとの間に空隙がなく、放熱性が悪い。そこで放熱性を向上するために、アームカバーとアームベースとの間に空隙を設けることも考えられる。一方、アームカバーとアームベースとの間に空隙を設けた第2アームの形状によっては、ロボットアーム全体の一体感が損なわれるおそれがある。
【課題を解決するための手段】
【0006】
本発明のロボットは、基台と、
前記基台に対し第1回転軸の回りに回転可能に接続される第1アームと、
前記第1アームの先端部に、前記第1アームに対し前記第1回転軸と平行な第2回転軸の回りに回転可能に接続され、アームベースと、前記アームベースの上部を覆うアームカバーと、を有する第2アームと、
前記アームベースの前記第2回転軸上に配置され、前記第2アームを回転させる駆動部と、を備え、
前記アームカバーは、前記アームベースの側面のうち前記駆動部に対応する部分に少なくとも設けられる被覆部を有し、
前記第1アームは、前記第1アームの先端部に設けられ、上方に行くに従って前記第2回転軸との距離が大きくなるよう傾斜する第1傾斜部を有し、
前記被覆部は、前記被覆部の少なくとも基端部に設けられ、下方に行くに従って前記第2回転軸との距離が大きくなるよう傾斜する第2傾斜部を有する。
【図面の簡単な説明】
【0007】
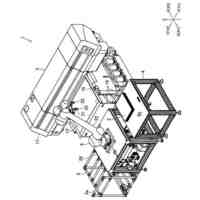
本発明のロボットの第1実施形態に係るロボットシステムの全体図である。
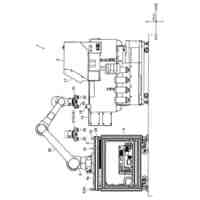
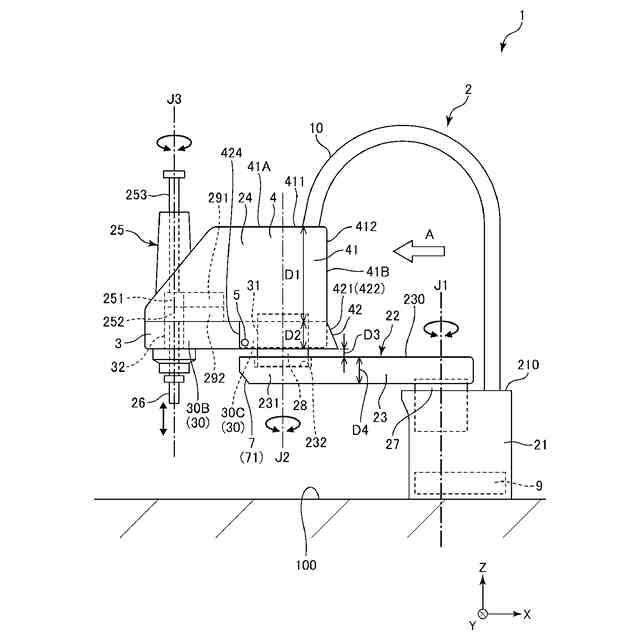
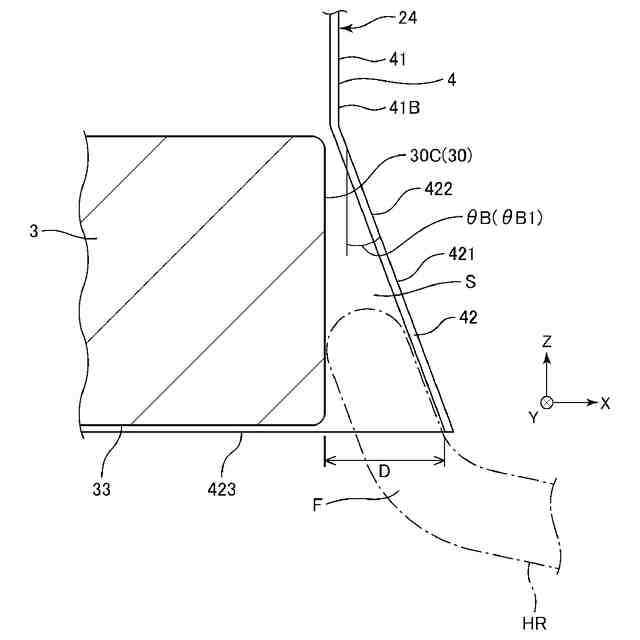
図1に示すロボットが備える第1アームおよび第2アームの接続部の側面図である。
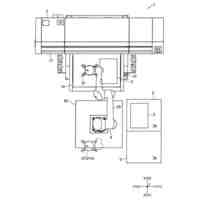
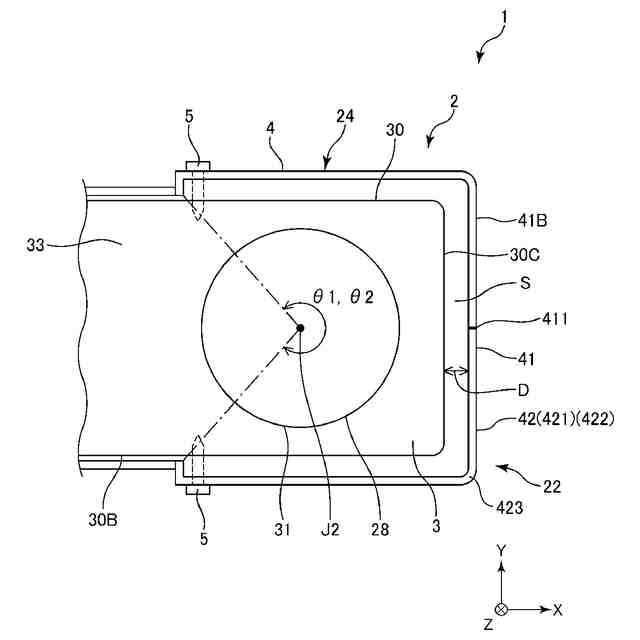
図1中矢印A方向から見た図である。
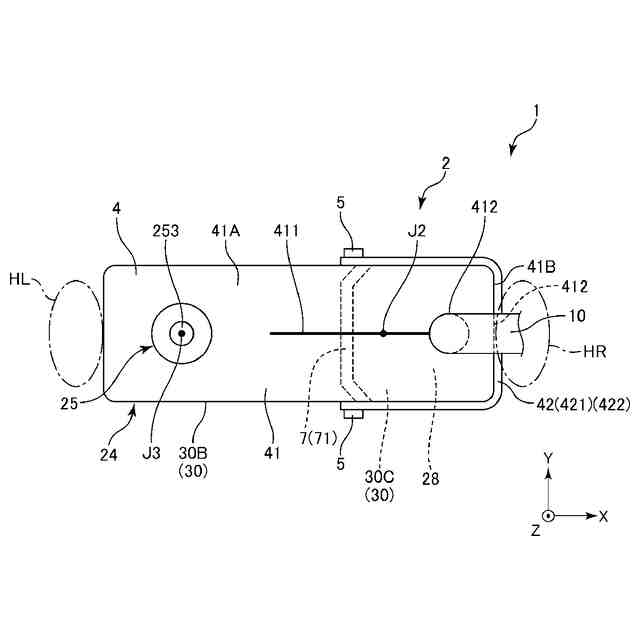
図3中矢印C方向から見た図である。
図3中B-B線断面図である。
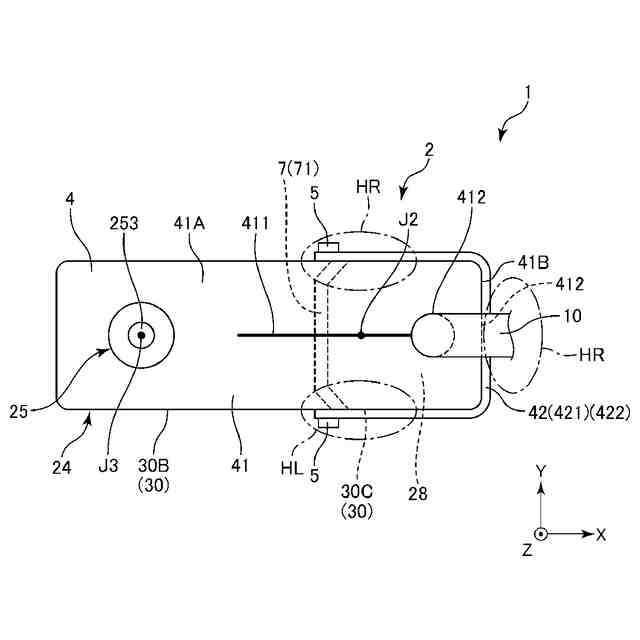
アームベースからアームカバーを離脱させる手順を説明するための図であって、第2アームを上方から見た図である。
アームベースからアームカバーを離脱させる手順を説明するための図であって、第2アームを上方から見た図である。
第2アームを上方から見た図である。
本発明の第2実施形態に係るロボットが備える第1アームおよび第2アームの接続部の側面図である。
【発明を実施するための形態】
【0008】
以下、本発明のロボットを添付図面に示す実施形態に基づいて詳細に説明する。
<第1実施形態>
図1は、本発明のロボットの第1実施形態に係るロボットシステムの全体図である。図2は、図1に示すロボットが備える第1アームおよび第2アームの接続部の側面図である。図3は、図1中矢印A方向から見た図である。図4は、図3中矢印C方向から見た図である。図5は、図3中B-B線断面図である。図6は、アームベースからアームカバーを離脱させる手順を説明するための図であって、第2アームを上方から見た図である。図7は、アームベースからアームカバーを離脱させる手順を説明するための図であって、第2アームを上方から見た図である。図8は、第2アームを上方から見た図である。
【0009】
図1中では、互いに直交する3軸であるX軸、Y軸およびZ軸が設定されており、図2~図8中にもそれぞれ同様の3軸が示されている。3軸のうちZ軸方向は鉛直方向を示し、X-Y平面は水平面を示す。また、3軸において、矢印の示す方向を「プラス側」、その反対方向を「マイナス側」と言う。これらのことは、図9についても同様である。
【0010】
図1、図2、図3および図5中の上下方向は、鉛直方向と一致している。図1、図2、図3および図5中の上側を「上」、「上部」または「上方」、下側を「下」、「下部」または「下方」とも言い、ロボットアーム22、第1アーム23および第2アーム24等については、図1、図2、図4、図6、図7、および図8中の右側を「基端」または「基端部」、左側を「先端」または「先端部」とも言う。これらのことは、図9についても同様である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
11日前
株式会社マキタ
電動工具
19日前
株式会社マキタ
電動工具
4日前
川崎重工業株式会社
ロボットリスト
19日前
川崎重工業株式会社
ロボットアーム
19日前
川崎重工業株式会社
ロボットアーム
19日前
日本車輌製造株式会社
締め付け工具
19日前
川崎重工業株式会社
ロボットシステム
19日前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
4日前
川崎重工業株式会社
塗装ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社京阪エンジニアリング
脱着装置
5日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社スター精機
ワーク搬送装置
8日前
株式会社マキタ
集塵アタッチメント
4日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
制御装置及び制御方法
19日前
工機ホールディングス株式会社
作業機
1か月前
モトコマ株式会社
寄せポンチホルダー
20日前
川崎重工業株式会社
ロボットシステム
11日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社ミマキエンジニアリング
印刷システム
1か月前
株式会社DailyColor
ロボットハンド
20日前
株式会社ミマキエンジニアリング
印刷システム
1か月前
有限会社松尾エンジニアリング
連結部材
20日前
個人
ターンバックル用工具
26日前
トヨタ自動車株式会社
経路決定システム及び方法
1か月前
株式会社SHIN‐JIGEN
上肢アシスト装置
25日前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
株式会社マキタ
打撃工具
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ