TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024135967
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023046899
出願日
2023-03-23
発明の名称
車両制御システム、及び車両制御方法
出願人
本田技研工業株式会社
,
国立大学法人 名古屋工業大学
,
学校法人近畿大学
代理人
弁理士法人クシブチ国際特許事務所
主分類
G08G
1/16 20060101AFI20240927BHJP(信号)
要約
【課題】交差点の右折又は左折を行う対象車両の走行を制御する際には、対象車両の利用者が違和感を抱くことを抑制して、利用者の快適な移動をサポートする。
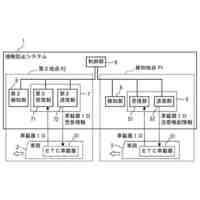
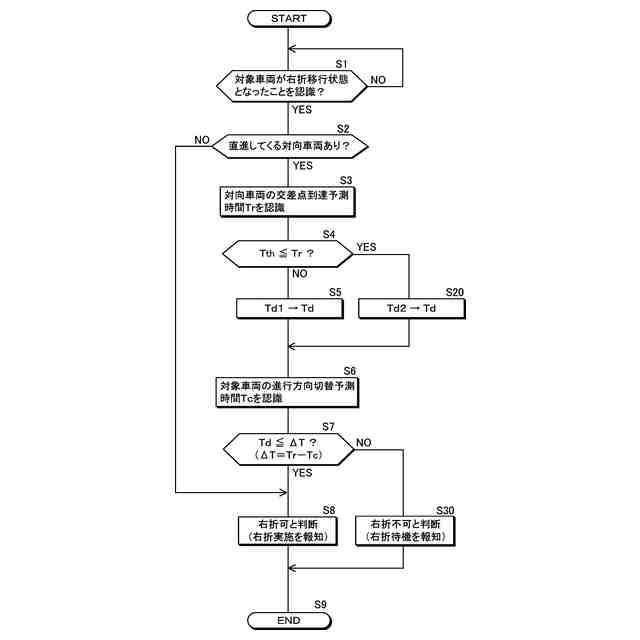
【解決手段】車両制御システム10aは、対向車両1bの交差点到達予測時間から対象車両1aの進行方向切替予測時間を減じた余裕時間が所定の判定時間以上であるときに、対象車両1aによる進行方向切替の実行が可能と判断する進行方向切替判断部25と、前記交差点到達予測時間が所定時間未満である範囲での前記判定時間を、前記交差点到達予測時間が前記所定時間以上である範囲での前記判定時間よりも短い時間に設定する判定時間設定部26と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
対象車両が、交差点内を、対向車線を横切って曲がることにより進行方向を切り替える進行方向切替を実行しようとする進行方向切替移行状態であることを認識する進行方向切替移行状態認識部と、
前記進行方向切替移行状態認識部により、前記対象車両が前記進行方向切替移行状態であることが認識されている状況で、前記対向車線を前記交差点に向かって直進する対向車両を認識する直進対向車両認識部と、
前記対象車両による前記進行方向切替の実行に要する予測時間である進行方向切替予測時間を認識する進行方向切替予測時間認識部と、
前記対向車両が前記交差点に到達するまでの予測時間である交差点到達予測時間を認識する交差点到達予測時間認識部と、
前記交差点到達予測時間から前記進行方向切替予測時間を減じた余裕時間が所定の判定時間以上であるときに、前記対象車両による前記進行方向切替の実行が可能と判断する進行方向切替判断部と、
前記交差点到達予測時間が所定時間未満である範囲での前記判定時間を、前記交差点到達予測時間が前記所定時間以上である範囲での前記判定時間よりも短い時間に設定する判定時間設定部と、
を備える車両制御システム。
続きを表示(約 800 文字)
【請求項2】
前記対象車両の利用者の属性を認識する利用者属性認識部を備え、
前記判定時間設定部は、前記利用者の属性に基づいて前記判定時間を補正する
請求項1に記載の車両制御システム。
【請求項3】
前記交差点の通行状況を認識する交差点通行状況認識部を備え、
前記判定時間設定部は、前記交差点の通行状況に基づいて前記判定時間を補正する
請求項1又は請求項2に記載の車両制御システム。
【請求項4】
コンピュータにより実行される車両制御方法であって、
対象車両が、交差点内を、対向車線を横切って曲がることにより進行方向を切り替える進行方向切替を実行しようとする進行方向切替移行状態であることを認識する進行方向切替移行状態認識ステップと、
前記進行方向切替移行状態認識ステップにより、前記対象車両が前記進行方向切替移行状態であることが認識されている状況で、前記対向車線を前記交差点に向かって直進する対向車両を認識する直進対向車両認識ステップと、
前記対象車両による前記進行方向切替の実行に要する予測時間である進行方向切替予測時間を認識する進行方向切替予測時間認識ステップと、
前記対向車両が前記交差点に到達するまでの予測時間である交差点到達予測時間を認識する交差点到達予測時間認識ステップと、
前記交差点到達予測時間から前記進行方向切替予測時間を減じた余裕時間が所定の判定時間以上であるときに、前記対象車両による前記進行方向切替の実行が可能と判断する進行方向切替判断ステップと、
前記交差点到達予測時間が所定時間未満である範囲での前記判定時間を、前記交差点到達予測時間が前記所定時間以上である範囲での前記判定時間よりも短い時間に設定する判定時間設定ステップと、
を含む車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御システム、及び車両制御方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて運転支援技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。例えば、特許文献1は、交差点における自車両の軌跡と他車両の軌跡との交点に基づいて、他車両に関する運転支援を行う運転支援装置を開示する。
【先行技術文献】
【特許文献】
【0003】
特開2011-145240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、運転支援技術においては、特に交差点で対向車線を横切って進行方向を切り替える(左側通行の場合は右折、右側通行の場合は左折)対象車両について、交差点を直進する対向車両の進行状況を判断して、適切なタイミングで右折又は左折が行われるように、車両制御を行う必要がある。このように、交差点の右折又は左折を行う対象車両の走行を制御する際には、対象車両の利用者(搭乗者)が違和感を抱くことを抑制して、利用者の快適な移動をサポートすることが課題となる。
また、従来の技術では、対象車両と対向車両の走行軌跡の交錯点を算出する際に、右折又は左折の制御を行う対象車両側の演算においては、何通りもの右折パス(経路)又は左折パスを算出し、各パスを算出するごとに対向車両の接近状況を認識して対向車両の到来パスを予測計算して、対象車両と対向車両が交錯するまでの時間と交錯する位置を算出する必要があり、このような繰り返しの処理に演算時間がかかっていた。
本願は上記課題の解決のため、交差点の右折又は左折を行う対象車両の走行を制御する際に、対象車両の利用者が違和感を抱くことを抑制することができる車両制御システム、及び車両制御方法を提供することを目的としたものである。そして、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0005】
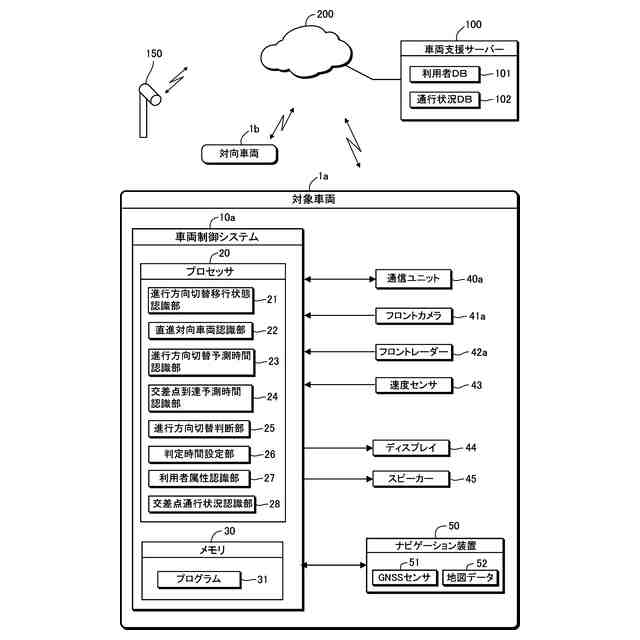
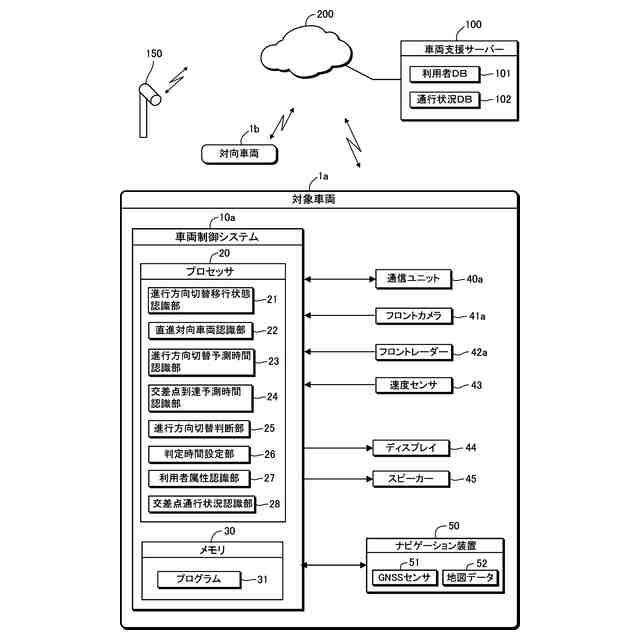
上記目的を達成するための第1態様として、対象車両が、交差点内を、対向車線を横切って曲がることにより進行方向を切り替える進行方向切替を実行しようとする進行方向切替移行状態であることを認識する進行方向切替移行状態認識部と、前記進行方向切替移行状態認識部により、前記対象車両が前記進行方向切替移行状態であることが認識されている状況で、前記対向車線を前記交差点に向かって直進する対向車両を認識する直進対向車両認識部と、前記対象車両による前記進行方向切替の実行に要する予測時間である進行方向切替予測時間を認識する進行方向切替予測時間認識部と、前記対向車両が前記交差点に到達するまでの予測時間である交差点到達予測時間を認識する交差点到達予測時間認識部と、前記交差点到達予測時間から前記進行方向切替予測時間を減じた余裕時間が所定の判定時間以上であるときに、前記対象車両による前記進行方向切替の実行が可能と判断する進行方向切替判断部と、前記交差点到達予測時間が所定時間未満である範囲での前記判定時間を、前記交差点到達予測時間が前記所定時間以上である範囲での前記判定時間よりも短い時間に設定する判定時間設定部と、を備える車両制御システムが挙げられる。
【0006】
上記車両制御システムにおいて、前記対象車両の利用者の属性を認識する利用者属性認識部を備え、前記判定時間設定部は、前記利用者の属性に基づいて前記判定時間を補正する構成としてもよい。
【0007】
上記車両制御システムにおいて、前記交差点の通行状況を認識する交差点通行状況認識部を備え、前記判定時間設定部は、前記交差点の通行状況に基づいて前記判定時間を補正する構成としてもよい。
【0008】
上記目的を達成するための第2態様として、コンピュータにより実行される車両制御方法であって、対象車両が、交差点内を、対向車線を横切って曲がることにより進行方向を切り替える進行方向切替を実行しようとする進行方向切替移行状態であることを認識する進行方向切替移行状態認識ステップと、前記進行方向切替移行状態認識ステップにより、前記対象車両が前記進行方向切替移行状態であることが認識されている状況で、前記対向車線を前記交差点に向かって直進する対向車両を認識する直進対向車両認識ステップと、前記対象車両による前記進行方向切替の実行に要する予測時間である進行方向切替予測時間を認識する進行方向切替予測時間認識ステップと、前記対向車両が前記交差点に到達するまでの予測時間である交差点到達予測時間を認識する交差点到達予測時間認識ステップと、前記交差点到達予測時間から前記進行方向切替予測時間を減じた余裕時間が所定の判定時間以上であるときに、前記対象車両による前記進行方向切替の実行が可能と判断する進行方向切替判断ステップと、前記交差点到達予測時間が所定時間未満である範囲での前記判定時間を、前記交差点到達予測時間が前記所定時間以上である範囲での前記判定時間よりも短い時間に設定する判定時間設定ステップと、を含む車両制御方法が挙げられる。
【発明の効果】
【0009】
上記車両制御システム及び車両制御方法によれば、交差点の右折又は左折を行う対象車両の走行を制御する際に、対象車両の利用者が違和感を抱くことを抑制することができる。また、上記車両制御システム及び車両制御方法によれば、交差点における対象車両と対向車両の位置関係を算出するだけで済むので、交差点における対象車両の右折又は左折の可否を判断するための演算処理に要する時間を大幅に削減することができる。
【図面の簡単な説明】
【0010】
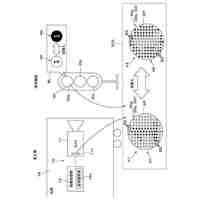
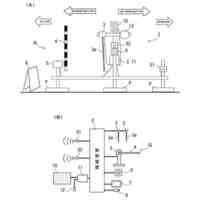
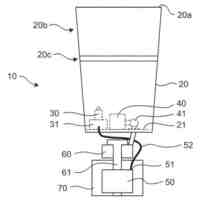
図1は、車両制御システムによる対象車両の制御態様の説明図である。
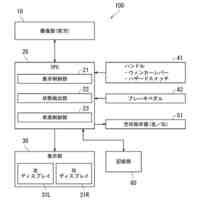
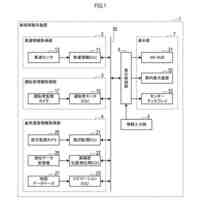
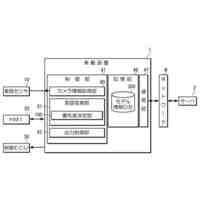
図2は、車両制御システムの構成図である。
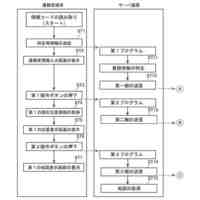
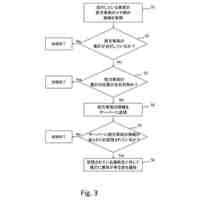
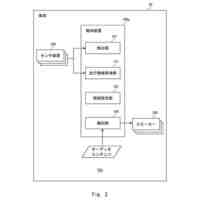
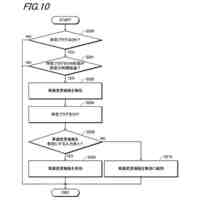
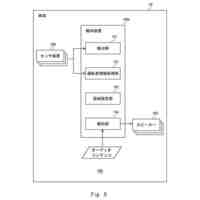
図3は、対象車両の右折に対応した制御処理のフローチャートである。
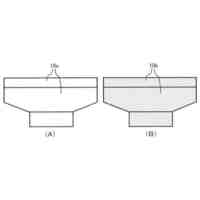
図4は、右折可否の判定時間の設定態様の説明図である。
図5は、対象車両の進行歩行切替予測時間及び対向車両の交差点到達予測時間の変化に応じた判定時間の設定態様の説明図である。
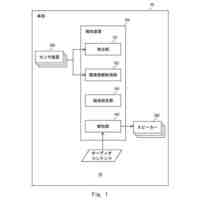
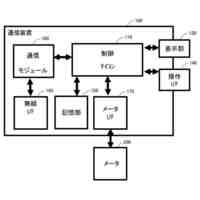
図6は、他の実施形態における車両制御システムの構成の説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
23日前
ニッタン株式会社
煙感知器
1か月前
個人
迷子支援システム
13日前
株式会社サンライン
発炎筒携行容器
21日前
株式会社あおい興産
避難誘導灯
7日前
能美防災株式会社
表示灯カバー
1か月前
ニッタン株式会社
発信機
13日前
ニッタン株式会社
発信機
13日前
能美防災株式会社
非常放送システム
1か月前
京セラ株式会社
制御装置
13日前
シャープ株式会社
表示装置
1か月前
トヨタ自動車株式会社
運転支援システム
1か月前
株式会社豊田自動織機
運行表示装置
今日
戸田建設株式会社
検知システム
21日前
日本信号株式会社
信号システム及び信号灯器
6日前
トヨタ自動車株式会社
情報提供システム
1か月前
株式会社JR西日本テクシア
接触防止システム
6日前
株式会社JVCケンウッド
報知装置及び報知方法
13日前
本田技研工業株式会社
制御装置
1か月前
株式会社JVCケンウッド
報知装置及び報知方法
13日前
株式会社IHI
運転支援装置
1か月前
株式会社市川工務店
車両用ゲート開閉装置
1か月前
株式会社JVCケンウッド
報知装置及び報知方法
13日前
シャープ株式会社
通信装置および通信方法
21日前
光陽無線株式会社
浸水予測システム及びプログラム
1か月前
シャープ株式会社
駐車場管理システム
1か月前
株式会社デンソー
車両用表示装置
21日前
株式会社デンソー
障害物通知システム
7日前
能美防災株式会社
防災機器
1か月前
Turing株式会社
情報処理装置およびプログラム
1か月前
株式会社デンソー
運転状況管理システム
1日前
能美防災株式会社
防災システム
1か月前
能美防災株式会社
加煙試験器
1か月前
トヨタ自動車株式会社
情報処理装置
今日
富士通株式会社
OD決定方法およびOD決定プログラム
1か月前
三菱電機株式会社
車両制御装置
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ