TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024170775
公報種別
公開特許公報(A)
公開日
2024-12-11
出願番号
2023087487
出願日
2023-05-29
発明の名称
車両制御装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20241204BHJP(信号)
要約
【課題】自車両の走行状態に応じて、段階的な減速を行わせて、乗員への違和感、及び後続車両への不快感を低減できる車両制御装置を提供する。
【解決手段】目標走行経路上に減速地点及び減速地点速度を設定し、自車両の現在位置と減速地点との間に予備減速完了地点を設定し、予備減速完了速度を設定し、最終減速区間の減速度の絶対値よりも、予備減速区間の減速度の絶対値が小さくなるように、予備減速完了地点及び予備減速完了速度を設定する車両制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の走行状態、及び前記自車両の周辺の道路情報を取得する情報取得部と、
前記自車両の目標走行経路を設定する目標走行経路設定部と、
前記走行状態、前記目標走行経路、及び前記道路情報に基づいて、前記目標走行経路上において、前記自車両が走行すべき速度が前記自車両の現在の走行速度よりも小さくなる地点である減速地点を設定し、前記減速地点で走行すべき速度である減速地点速度を設定する減速地点設定部と、
前記目標走行経路上において、前記自車両の現在位置と前記減速地点との間に、前記自車両の予備減速を完了させる地点である予備減速完了地点を設定し、前記予備減速完了地点で走行すべき速度である予備減速完了速度を設定する予備減速設定部と、
前記予備減速完了地点、前記予備減速完了速度、前記減速地点、及び前記減速地点速度に基づいて、目標走行状態を設定する目標走行状態設定部と、
前記目標走行状態に基づいて、前記自車両を制御する車両制御部と、
を備え、
前記予備減速設定部は、前記予備減速完了地点から前記減速地点までの最終減速区間の減速度の絶対値よりも、前記予備減速の開始地点から前記予備減速完了地点までの予備減速区間の減速度の絶対値が小さくなるように、前記予備減速完了地点及び前記予備減速完了速度を設定する車両制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記予備減速設定部は、前記自車両の現在位置から前記予備減速完了地点までの残り距離、前記最終減速区間の距離、前記現在の走行速度、及び前記減速地点速度に基づいて、前記予備減速完了速度を設定する請求項1に記載の車両制御装置。
【請求項3】
前記予備減速設定部は、前記目標走行経路上に本線から分流する分流車線が存在する場合に、前記分流車線の開始地点の前方に前記予備減速完了地点を設定する請求項1に記載の車両制御装置。
【請求項4】
前記情報取得部は、前記自車両の周辺の他車両の情報を取得し、
前記予備減速設定部は、前記自車両が走行している車線上であって、前記自車両の後方の判定範囲内に前記他車両が存在する場合に、前記他車両が存在しない場合よりも大きい前記予備減速完了速度を設定する請求項1に記載の車両制御装置。
【請求項5】
前記減速地点設定部は、前記目標走行経路上において、前記自車両の現在の走行速度よりも低い制限速度の区間を開始する制限速度標識の位置を、前記減速地点として設定し、前記制限速度標識の制限速度に基づいて、前記減速地点速度を設定する請求項1から4のいずれか一項に記載の車両制御装置。
【請求項6】
前記減速地点設定部は、前記目標走行経路上に、減速が必要な料金所が存在する場合に、前記料金所の入り口を、前記減速地点として設定し、
前記料金所の通過速度を、前記減速地点速度として設定する請求項1から4のいずれか一項に記載の車両制御装置。
【請求項7】
前記予備減速設定部は、前記減速地点に到達するまでの間に、車線変更が必要である場合において、ドライバによる方向指示器の操作を検出した場合に、前記予備減速完了地点、及び前記予備減速完了速度を設定し、前記予備減速を開始させる請求項1から4のいずれか一項に記載の車両制御装置。
【請求項8】
前記予備減速設定部は、前記予備減速区間の減速度の絶対値が、前記予備減速区間の上限値以下になるように、前記予備減速完了速度を設定する請求項1から4いずれか一項に記載の車両制御装置。
【請求項9】
前記減速地点設定部は、前記最終減速区間の減速度の絶対値が、前記最終減速区間の上限値以下になるように、前記減速地点速度を設定する請求項1から4のいずれか一項に記載の車両制御装置。
【請求項10】
前記減速地点設定部は、前記減速地点速度が、判定速度を超える場合は、ドライバに手動運転を要求する請求項9に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この本願は、車両制御装置に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
運転支援技術において、ドライバの負担を軽減するために、制限速度の切り替わりなど自車両が走行すべき速度の変化に応じて適切に走行速度を自動制御する車両制御装置が提案されている。
【0003】
例えば、特許文献1には、自車両が車線変更しなければならない車線変更箇所と、車線変更箇所より前方に位置する基準点を設定し、車線変更完了地点から基準点までの距離、及び車線変更完了地点から基準点までの減速度に基づき車線変更完了箇所で走行すべき速度を推定し、車線変更完了地点に到達するまでに、事前に減速することによって、車線変更後の急減速を防ぐことが記載されている。
【先行技術文献】
【特許文献】
【0004】
特許6323565号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の技術では、車線変更完了地点から基準点までの距離、及び車線変更完了地点から基準点までの減速度に基づき車線変更完了箇所で走行すべき速度を推定しているため、車線変更前の走行状態(走行速度、現在位置から車線変更完了箇所までの距離)によっては、現在位置から車線変更完了箇所までの減速で急減速が発生する可能性がある。このように車線変更前に急減速が発生すると、乗員に違和感を与えたり、後続車両に不快感を与えたりする。
【0006】
そこで、本願は、自車両の走行状態に応じて、段階的な減速を行わせて、乗員への違和感、及び後続車両への不快感を低減できる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本願に係る車両制御装置は、
自車両の走行状態、及び前記自車両の周辺の道路情報を取得する情報取得部と、
前記自車両の目標走行経路を設定する目標走行経路設定部と、
前記走行状態、前記目標走行経路、及び前記道路情報に基づいて、前記目標走行経路上において、前記自車両が走行すべき速度が前記自車両の現在の走行速度よりも小さくなる地点である減速地点を設定し、前記減速地点で走行すべき速度である減速地点速度を設定する減速地点設定部と、
前記目標走行経路上において、前記自車両の現在位置と前記減速地点との間に、前記自車両の予備減速を完了させる地点である予備減速完了地点を設定し、前記予備減速完了地点で走行すべき速度である予備減速完了速度を設定する予備減速設定部と、
前記予備減速完了地点、前記予備減速完了速度、前記減速地点、及び前記減速地点速度に基づいて、目標走行状態を設定する目標走行状態設定部と、
前記目標走行状態に基づいて、前記自車両を制御する車両制御部と、
を備え、
前記予備減速設定部は、前記予備減速完了地点から前記減速地点までの最終減速区間の減速度の絶対値よりも、前記予備減速の開始地点から前記予備減速完了地点までの予備減速区間の減速度の絶対値が小さくなるように、前記予備減速完了地点及び前記予備減速完了速度を設定するものである。
【発明の効果】
【0008】
本願に係る車両制御装置によれば、現在の走行速度から減速地点の減速地点速度まで、予備減速と最終減速との2段階の減速により計画的に減速させることができる。この際、最終減速区間の減速度の絶対値よりも、予備減速区間の減速度の絶対値が小さくなるように、予備減速完了地点及び予備減速完了速度が設定されるので、段階的に減速度の絶対値が大きくなる減速が行われる。よって、円滑な減速を実現でき、急減速により、乗員に違和感を与えたり、後続車両に不快感を与えたりすることを防止でき、快適性を向上できる。
【図面の簡単な説明】
【0009】
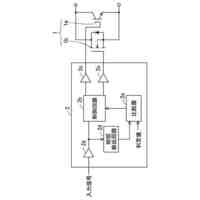
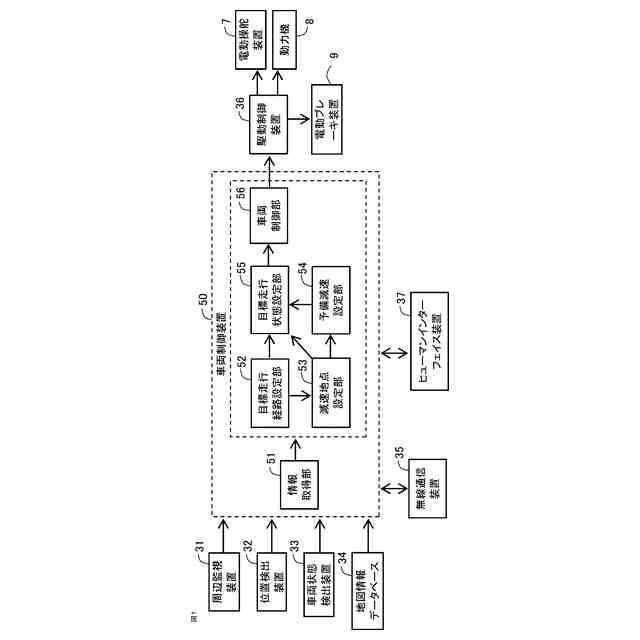
実施の形態1に係る車両制御装置及び車両制御システムの概略ブロック図である。
実施の形態1に係る車両制御装置の概略ハードウェア構成図である。
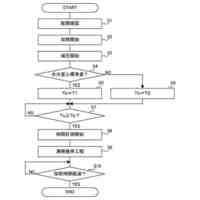
実施の形態1に係る車両制御装置の概略的な処理を説明するためのフローチャートである。
実施の形態1に係る分流車線における処理を説明するための図である。
実施の形態1に係る予備減速設定部等の処理を説明するためのフローチャートである。
実施の形態1に係る予備減速完了地点の設定を説明するための図である。
実施の形態1に係る実現性がある初期解の演算を説明するための図である。
実施の形態1に係る実現性がない初期解の演算を説明するための図である。
実施の形態1に係る実現性がある再演算後の解の演算を説明するための図である。
実施の形態1に係る実現性がない再演算後の解の演算を説明するための図である。
実施の形態1に係る実現性がない再々演算後の解の演算を説明するための図である。
実施の形態1に係る再々々演算後の解の演算を説明するための図である。
【発明を実施するための形態】
【0010】
1.実施の形態1
実施の形態1に係る車両制御装置50について図面を参照して説明する。本実施の形態では、車両制御装置50は、自車両に設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
掃除機
10日前
三菱電機株式会社
冷蔵庫
13日前
三菱電機株式会社
電気機器
7日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明器具
21日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
回転電機
23日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
歯車装置
7日前
三菱電機株式会社
照明装置
13日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
加熱調理器
13日前
三菱電機株式会社
食器洗浄機
21日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
端子カバー
1か月前
三菱電機株式会社
監視システム
22日前
三菱電機株式会社
電力変換装置
21日前
三菱電機株式会社
電力変換装置
1か月前
三菱電機株式会社
アンテナ装置
1か月前
三菱電機株式会社
三次元造形装置
13日前
三菱電機株式会社
誘導加熱調理器
21日前
三菱電機株式会社
誘導加熱調理器
21日前
三菱電機株式会社
誘導加熱調理器
1か月前
三菱電機株式会社
電磁波発生装置
10日前
三菱電機株式会社
誘導加熱調理器
1か月前
三菱電機株式会社
電磁波発生装置
1か月前
三菱電機株式会社
保護リレー装置
1か月前
三菱電機株式会社
非常用照明器具
15日前
三菱電機株式会社
誘導加熱調理器
21日前
三菱電機株式会社
ねじ取り出し装置
14日前
三菱電機株式会社
走行計画生成装置
6日前
三菱電機株式会社
換気送風システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ