TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024132039
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042663
出願日
2023-03-17
発明の名称
制御装置、遠隔自動運転システム、および、移動体の制御方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/09 20060101AFI20240920BHJP(信号)
要約
【課題】遠隔制御によって移動体が移動するエリアへの様々な人の接近を想定した、より適切な移動体の制御技術を提供する。
【解決手段】遠隔制御によって移動体を移動させる遠隔自動運転システムで用いられる制御装置は、遠隔自動運転システムに備えられた第1検知部によって対象人物が検知された場合、第1検知部による対象人物の検知結果に基づいて、対象人物の居場所を検出する居場所検出部と、検出された居場所に基づいて、遠隔制御されている移動体のうち、対象人物に接近し得る移動体を特定する移動体特定部と、特定された移動体に対して、移動体の運転モードを、対象人物を警戒するための警戒モードに変更させる制御信号を送信する信号送信部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
遠隔制御によって移動体を移動させる遠隔自動運転システムで用いられる制御装置であって、
前記遠隔自動運転システムに備えられた第1検知部によって対象人物が検知された場合、前記第1検知部による前記対象人物の検知結果に基づいて、前記対象人物の居場所を検出する居場所検出部と、
検出された前記居場所に基づいて、遠隔制御されている前記移動体のうち、前記対象人物に接近し得る前記移動体を特定する移動体特定部と、
特定された前記移動体に対して、前記移動体の運転モードを、前記対象人物を警戒するための警戒モードに変更させる制御信号を送信する信号送信部と、を備える、制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記移動体特定部は、前記対象人物が居る建屋内を移動している前記移動体を特定することと、前記対象人物に近づいている前記移動体を特定することと、前記対象人物との間の距離が予め定められた距離以下である前記移動体を特定することと、の少なくともいずれかを実行することによって、前記対象人物に接近し得る前記移動体を特定する、制御装置。
【請求項3】
請求項1に記載の制御装置であって、
前記信号送信部は、前記制御信号として、前記移動体の移動速度を下げるための信号を送信する、制御装置。
【請求項4】
請求項1に記載の制御装置であって、
前記信号送信部は、前記制御信号として、前記移動体から発せられる光の光量を上げるための信号と、前記移動体から発せられる音の音量を上げるための信号と、の少なくともいずれかを送信する、制御装置。
【請求項5】
請求項1から4のいずれか一項に記載の制御装置と、
前記移動体と、
前記第1検知部と、
前記遠隔制御を実行することによって前記移動体を移動させる遠隔制御部と、を備える、遠隔自動運転システム。
【請求項6】
請求項5に記載の遠隔自動運転システムであって、
前記遠隔制御に用いられ、前記移動体の位置を検出するための遠隔制御用センサを備え、
前記第1検知部は、前記遠隔制御用センサを用いて前記対象人物を検知する、遠隔自動運転システム。
【請求項7】
請求項6に記載の遠隔自動運転システムであって、
前記遠隔制御用センサは、前記移動体の位置を検出するための画像を撮影するカメラによって構成されている、遠隔自動運転システム。
【請求項8】
請求項7に記載の遠隔自動運転システムであって、
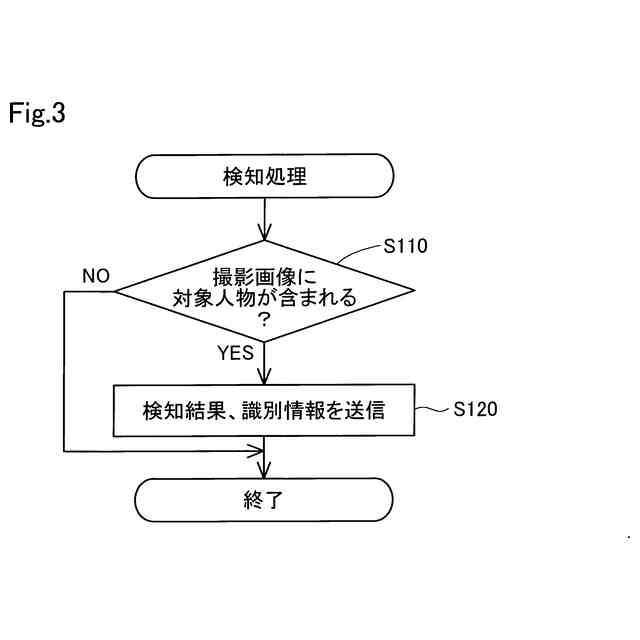
前記第1検知部は、前記カメラによる撮影画像と、入力画像に予め定められた検知条件を満たす人物が含まれるか否かに関して学習済みの学習モデルと、を用いて、前記対象人物を検知する、遠隔自動運転システム。
【請求項9】
請求項6に記載の遠隔自動運転システムであって、
前記居場所検出部は、前記対象人物の検知結果と、前記遠隔制御用センサの位置情報と、に基づいて前記居場所を検出する、遠隔自動運転システム。
【請求項10】
請求項5に記載の遠隔自動運転システムであって、
前記移動体は、車両であり、
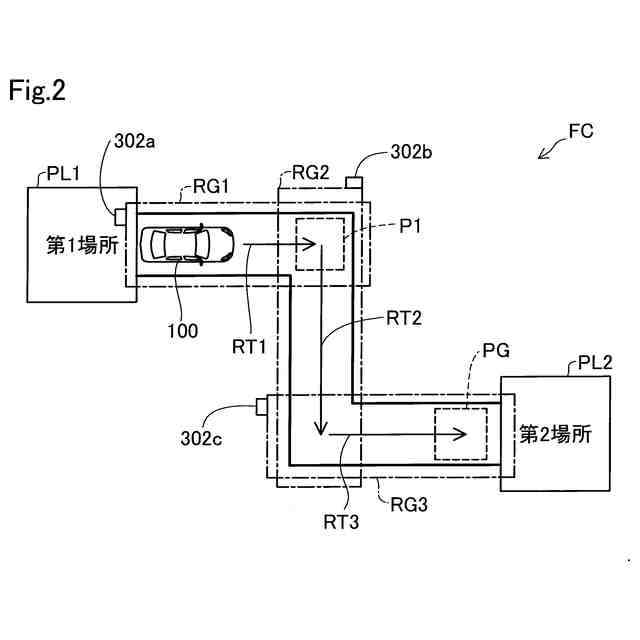
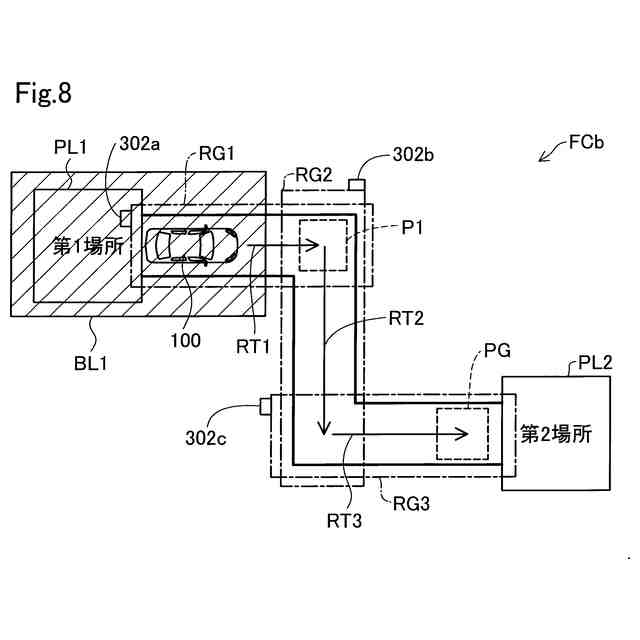
前記遠隔制御部は、前記遠隔制御を実行することによって、前記移動体に、前記移動体を製造するための工場内における第1場所と第2場所との間を走行させ、
前記第1場所では、前記移動体の製造に関する第1工程が実行され、前記第2場所では、前記第1工程よりも後の工程である第2工程が実行される、遠隔自動運転システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、遠隔自動運転システム、および、移動体の制御方法に関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
特許文献1には、車両の製造工程において、遠隔制御によって車両を自動走行させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠隔制御によって移動体が移動するエリアには、様々な人が接近する可能性がある。例えば、移動体が移動する工場には、通常、移動体への対処レベルが比較的高い熟練者だけでなく、非熟練者や来訪者といった対処レベルが比較的低い人が出入りする。そのため、移動体の移動エリアへの様々な人の接近を想定した、より適切な移動体の制御技術が望まれていた。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
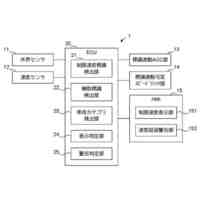
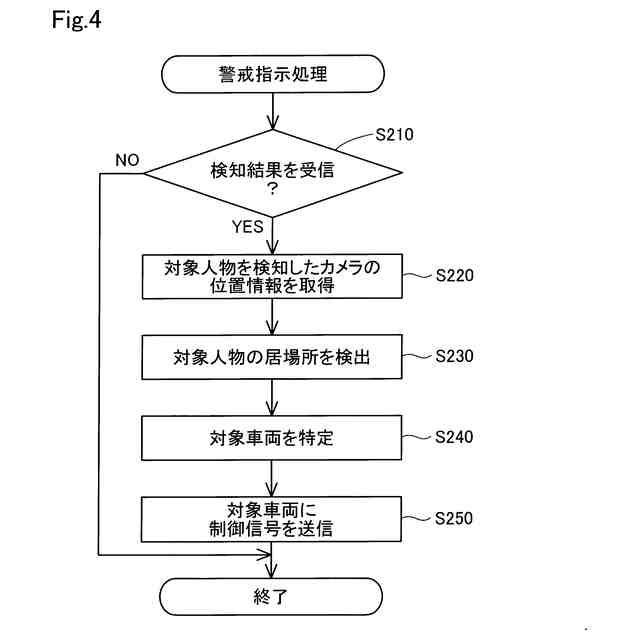
(1)本開示の第1の形態によれば、遠隔制御によって移動体を移動させる遠隔自動運転システムで用いられる制御装置が提供される。この制御装置は、前記遠隔自動運転システムに備えられた第1検知部によって対象人物が検知された場合、前記第1検知部による前記対象人物の検知結果に基づいて、前記対象人物の居場所を検出する居場所検出部と、検出された前記居場所に基づいて、遠隔制御されている前記移動体のうち、前記対象人物に接近し得る前記移動体を特定する移動体特定部と、特定された前記移動体に対して、前記移動体の運転モードを、前記対象人物を警戒するための警戒モードに変更させる制御信号を送信する信号送信部と、を備える。
このような形態であれば、遠隔自動運転システムにおいて、対象人物が検知された場合に、その対象人物に接近し得る移動体を警戒モードに変更できる。そのため、様々な人物が接近し得るエリアにおいて、より適切に移動体を遠隔制御によって移動させることができる。
(2)上記形態の制御装置では、前記移動体特定部は、前記対象人物が居る建屋内を移動している前記移動体を特定することと、前記対象人物に近づいている前記移動体を特定することと、前記対象人物との間の距離が予め定められた距離以下である前記移動体を特定することと、の少なくともいずれかを実行することによって、前記対象人物に接近し得る前記移動体を特定してもよい。このような形態によれば、対象人物に接近し得る移動体を適切に特定できる。
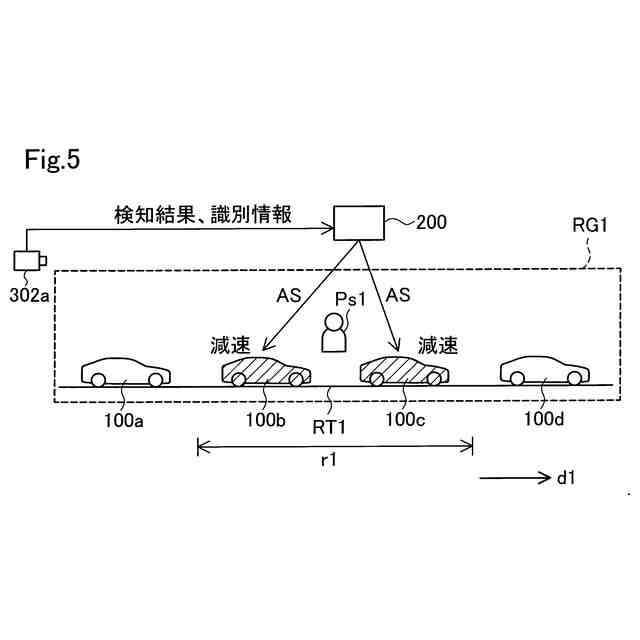
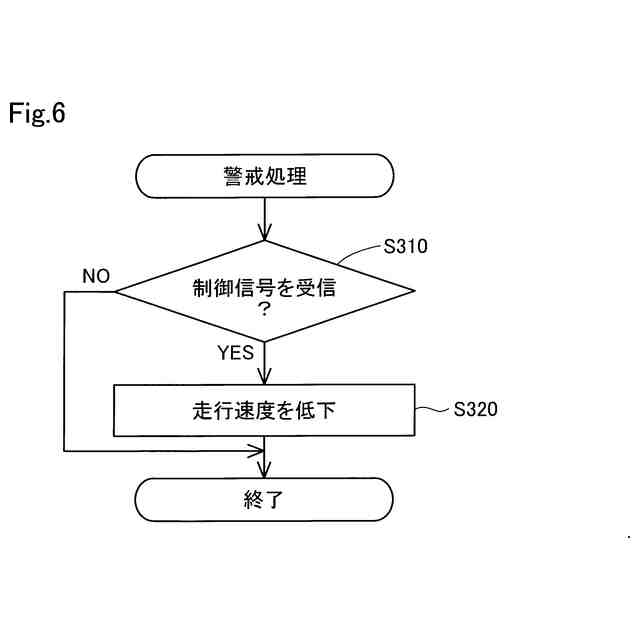
(3)上記形態の制御装置では、前記信号送信部は、前記制御信号として、前記移動体の移動速度を下げるための信号を送信してもよい。このような形態によれば、警戒モードにおいて、移動体の移動速度を下げることで、移動体に対象人物を警戒させることができる。
(4)上記形態の制御装置では、前記信号送信部は、前記制御信号として、前記移動体から発せられる光の光量を上げるための信号と、前記移動体から発せられる音の音量を上げるための信号と、の少なくともいずれかを送信してもよい。このような形態によれば、警戒モードにおいて、移動体から発生される光の光量や音の音量を上げることで、移動体に対象人物を警戒させることができる。
(5)本開示の第2の形態によれば、遠隔自動運転システムが提供される。この遠隔自動運転システムは、上記形態の制御装置と、前記移動体と、前記第1検知部と、前記遠隔制御を実行することによって前記移動体を移動させる遠隔制御部と、を備える。
(6)上記形態の遠隔自動運転システムでは、前記遠隔制御に用いられ、前記移動体の位置を検出するための遠隔制御用センサを備え、前記第1検知部は、前記遠隔制御用センサを用いて前記対象人物を検知してもよい。このような形態によれば、遠隔制御用センサを対象人物の検知にも利用できる。
(7)上記形態の遠隔自動運転システムでは、前記遠隔制御用センサは、前記移動体の位置を検出するための画像を撮影するカメラによって構成されていてもよい。このような形態によれば、移動体を遠隔制御するのに用いられるカメラを対象人物の検知にも利用できる。
(8)上記形態の遠隔自動運転システムでは、前記第1検知部は、前記カメラによる撮影画像と、入力画像に予め定められた検知条件を満たす人物が含まれるか否かについて学習済みの学習モデルと、を用いて、前記対象人物を検知してもよい。このような形態によれば、撮影画像と学習モデルとを用いて、対象人物をより適切に検知できる。
(9)上記形態の遠隔自動運転システムでは、前記居場所検出部は、前記対象人物の検知結果と、前記遠隔制御用センサの位置情報と、に基づいて前記居場所を検出してもよい。このような形態によれば、遠隔制御用センサの位置情報を用いて、対象人物の居場所を簡易に検出できる。
(10)上記形態の遠隔自動運転システムでは、前記移動体は、車両であり、前記遠隔制御部は、前記遠隔制御を実行することによって、前記移動体に、前記移動体を製造するための工場内における第1場所と第2場所との間を走行させ、前記第1場所では、前記移動体の製造に関する第1工程が実行され、前記第2場所では、前記第1工程よりも後の工程である第2工程が実行されてもよい。このような形態によれば、移動体を、遠隔制御によって、移動体の製造に関する各工程が実行される場所間で効率的に移動させることができる。また、移動体を製造する工場に様々な人物が出入りする場合であっても、工場内でより適切に移動体を遠隔制御によって移動させることができる。
(11)上記形態の遠隔自動運転システムでは、前記移動体は、前記移動体の周囲の状況を検知する第2検知部を有し、前記信号送信部は、前記制御信号として、前記第2検知部による検知の感度を上げるための信号を送信してもよい。このような形態によれば、警戒モードにおいて、移動体に備えられた第2検知部による検知の感度を上げることで、移動体に対象人物を警戒させることができる。
(12)上記形態の遠隔自動運転システムでは、前記移動体は、前記第2検知部によって対象人物が検知された場合に、前記移動体の運転状態を変更する変更処理を実行する状態変更部を有し、前記変更処理は、前記移動体の移動速度を下げる処理と、前記移動体から発せられる光の光量を上げる処理と、前記移動体から発せられる音の音量を上げる処理と、の少なくともいずれかを含んでいてもよい。このような形態によれば、車両が第2検知部によって自ら対象人物を検知でき、かつ、車両が対象人物を検知した場合に、車両が自ら変更処理を実行できる。
(13)上記形態の遠隔自動運転システムでは、前記状態変更部は、前記変更処理を実行した後、前記第2検知部によって人物が検知されなくなった場合、前記運転状態が前記変更処理によって変更された状態を解除する処理を実行してもよい。このような形態によれば、変更処理が実行された後に第2検知部によって検知対象の人物が検知されなくなった場合に、移動体の運転状態が変更された状態を、その移動体が自ら解除できる。
【0007】
本開示は、上述した制御装置や遠隔自動運転システムとしての形態以外にも、例えば、移動体や、移動体の制御方法などの種々の形態で実現することが可能である。
【図面の簡単な説明】
【0008】
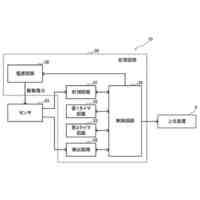
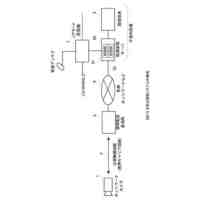
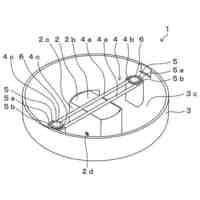
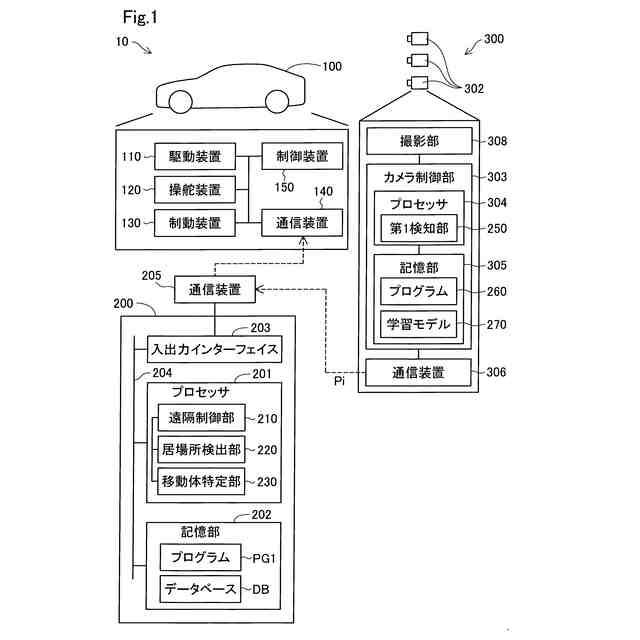
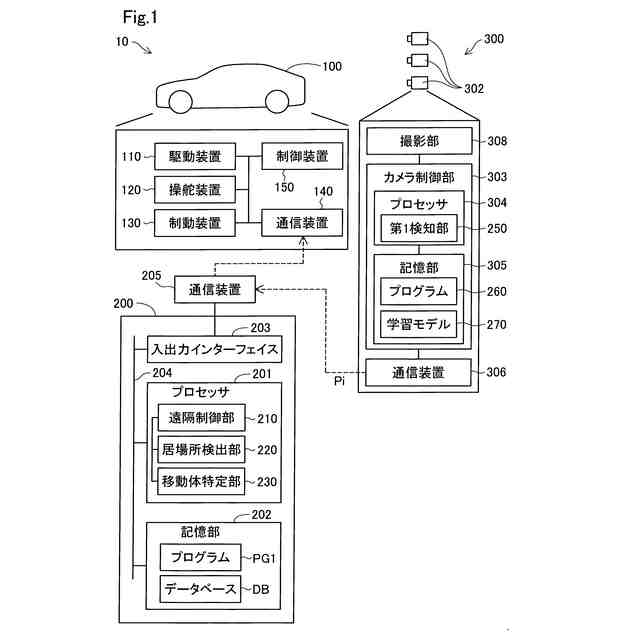
第1実施形態における遠隔自動運転システムの概略構成を示す説明図。
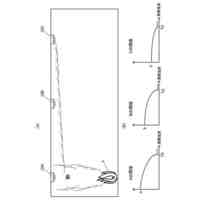
第1実施形態における車両の自動運転制御を説明する図。
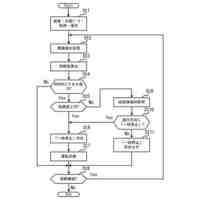
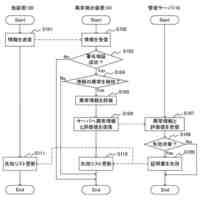
検知処理のフローチャート。
第1実施形態における警戒指示処理のフローチャート。
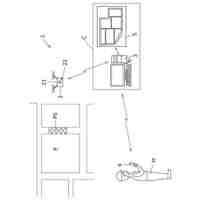
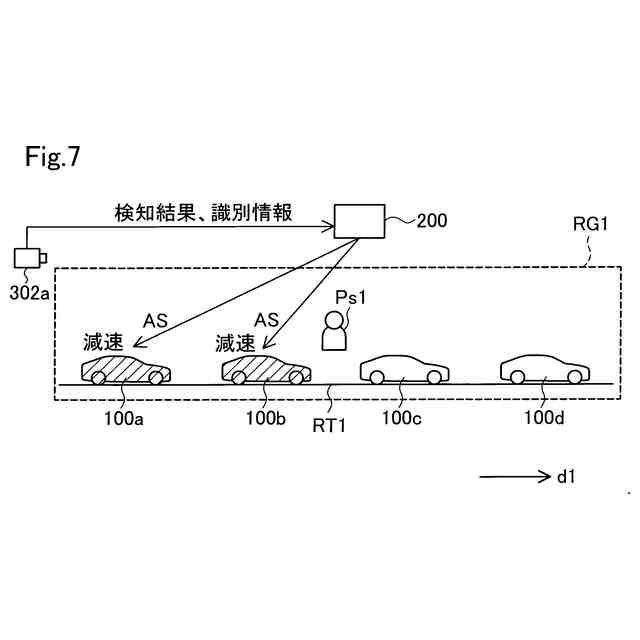
第1実施形態における警戒指示処理を説明する模式図。
第1実施形態における警戒処理のフローチャート。
第2実施形態における警戒指示処理を説明する模式図。
第3実施形態における車両の自動運転制御を説明する図。
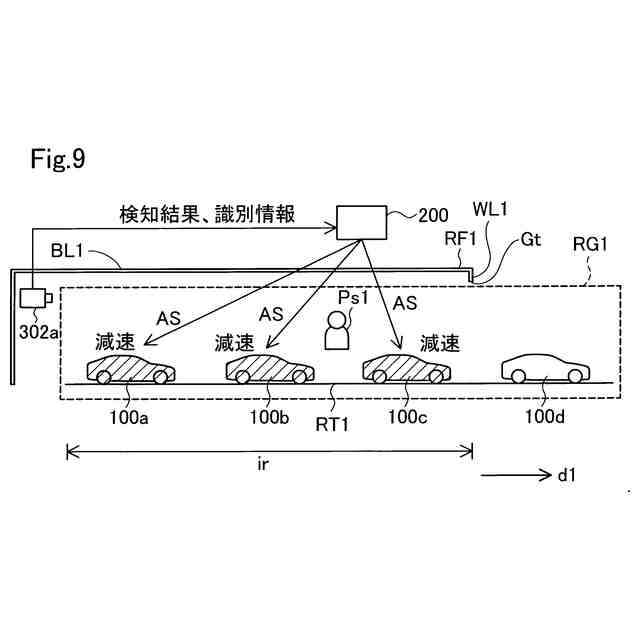
第3実施形態における警戒指示処理を説明する模式図。
第4実施形態における警戒指示処理を説明する模式図。
第5実施形態における警戒指示処理を説明する模式図。
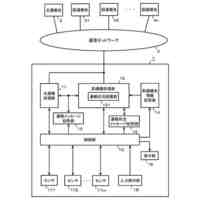
第6実施形態における遠隔自動運転システムの概略構成を示す説明図。
第6実施形態における警戒処理のフローチャート。
第6実施形態における警戒処理を説明する模式図。
【発明を実施するための形態】
【0009】
A.第1実施形態:
図1は、第1実施形態における遠隔自動運転システム10の概略構成を示す説明図である。本実施形態では、遠隔自動運転システム10は、後述するように、移動体を製造する工場において、移動体を遠隔制御によって移動させるために用いられる。本実施形態における移動体は、車両100であり、より具体的には、電気自動車(BEV:Battery Electric Vehicle)である。移動体は、電気自動車に限られず、例えば、ガソリン自動車や、ハイブリッド自動車や、燃料電池自動車等の他の車両であってもよい。なお、本明細書では、製品として完成した状態と、製造途中の半製品・仕掛品の状態とを総じて「車両」と呼ぶ。また、移動体は、車両に限られず、例えば、移動ロボットや、電動垂直離着陸機(いわゆる空飛ぶ自動車)であってもよい。
【0010】
本実施形態における遠隔自動運転システム10は、上述した移動体としての車両100と、制御装置200と、車両検出部300とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
防犯砂利システム
1か月前
能美防災株式会社
警報器
2か月前
日本精機株式会社
表示システム
25日前
アズビル株式会社
計測装置
2か月前
個人
警報装置付きフェイスガード
1か月前
日本精機株式会社
盗難防止システム
1か月前
個人
音による速度計及びプログラム
1か月前
サクサ株式会社
通報装置
2か月前
ニッタン株式会社
発信機
24日前
ニッタン株式会社
発信機
24日前
キヤノン株式会社
異常判定装置
2か月前
加藤電機株式会社
車両用警報装置
18日前
合同会社Gugenka
防犯装置
1か月前
トヨタ自動車株式会社
情報処理装置
1か月前
能美防災株式会社
発信機
18日前
キヤノン株式会社
異常判定システム
2か月前
株式会社大林組
監視システム
10日前
株式会社SUBARU
走行制御装置
2か月前
株式会社JVCケンウッド
警告装置
25日前
トヨタ自動車株式会社
警告装置
1か月前
ニッタン株式会社
感知器ベース
21日前
中国電力株式会社
通行止め管理システム
1か月前
常盤電業株式会社
表示機、信号機
1か月前
株式会社日立国際電気
防災無線システム
今日
常盤電業株式会社
表示機、信号機
1か月前
能美防災株式会社
防災表示盤
今日
能美防災株式会社
火災感知器
10日前
ニッタン株式会社
火災報知システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
本田技研工業株式会社
運転支援装置
1か月前
東京瓦斯株式会社
自動運転支援装置
1か月前
個人
車両制御システム
今日
セルスター工業株式会社
複合機能車載装置
21日前
ジェネクスト株式会社
駐停車違反判定装置
1か月前
本田技研工業株式会社
車両制御装置
今日
トヨタ自動車株式会社
緊急通報装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ