TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024123650
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023031250
出願日
2023-03-01
発明の名称
折畳棚展開装置
出願人
株式会社ナベル
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20240905BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】卵パックを収容する移動式のラックに設けられた折り畳み式の棚板を展開する折畳棚展開装置において、棚板の展開が失敗する確率を低減する。
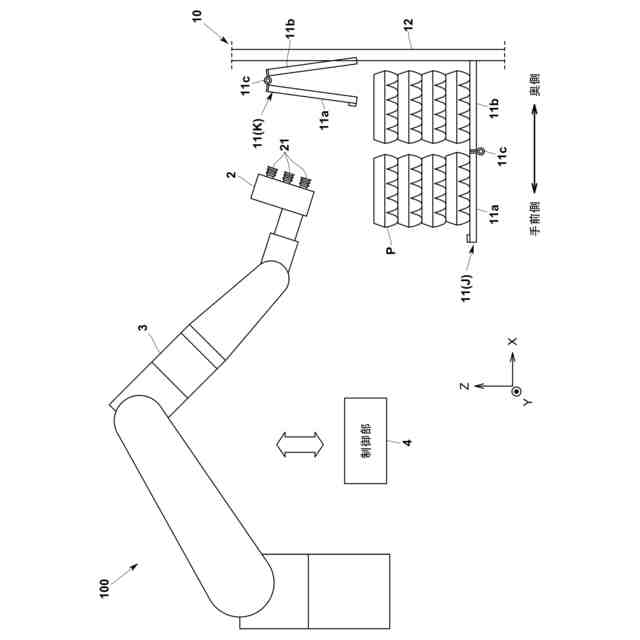
【解決手段】卵パックPを収容する移動式のラック10に設けられた折り畳み式の棚板11を展開する折畳棚展開装置100であって、棚板11を保持する保持ヘッド2と、保持ヘッド2の位置及び姿勢を変更可能なロボットアーム3と、保持ヘッド2及びロボットアーム3を制御して棚板11の展開動作を行わせる制御部4とを備え、制御部4は、棚板11の展開動作が失敗した場合に、保持ヘッド2及びロボットアーム3を制御して棚板11の再展開動作を行わせる。
【選択図】図3
特許請求の範囲
【請求項1】
卵パックを収容する移動式のラックに設けられた折り畳み式の棚板を展開する折畳棚展開装置であって、
前記棚板を保持する保持ヘッドと、
前記保持ヘッドの位置及び姿勢を変更可能なロボットアームと、
前記保持ヘッド及び前記ロボットアームを制御して前記棚板の展開動作を行わせる制御部とを備え、
前記制御部は、前記棚板の展開動作が失敗した場合に、前記保持ヘッド及び前記ロボットアームを制御して前記棚板の再展開動作を行わせる、折畳棚展開装置。
続きを表示(約 290 文字)
【請求項2】
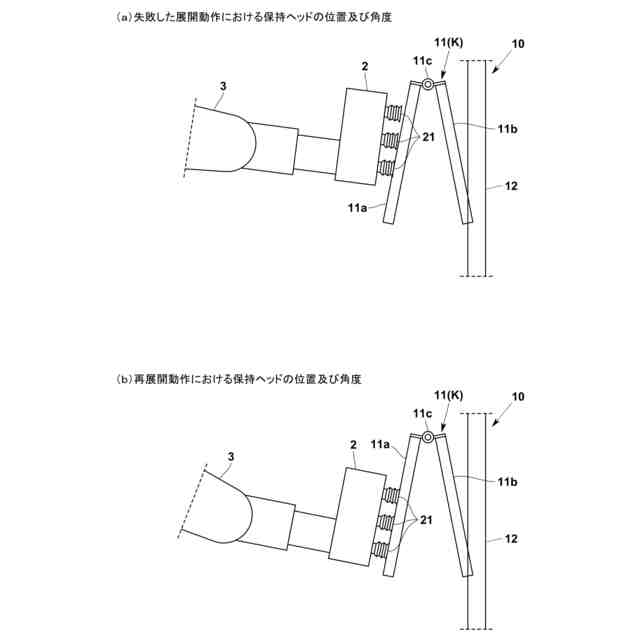
前記制御部は、前記再展開動作を行わせる場合に、前記保持ヘッドにより前記棚板を保持する位置、保持する角度又は前記保持ヘッドの移動経路を、失敗した前記展開動作とは異ならせる、請求項1に記載の折畳棚展開装置。
【請求項3】
前記棚板の展開状態を検出する状態センサを更に備え、
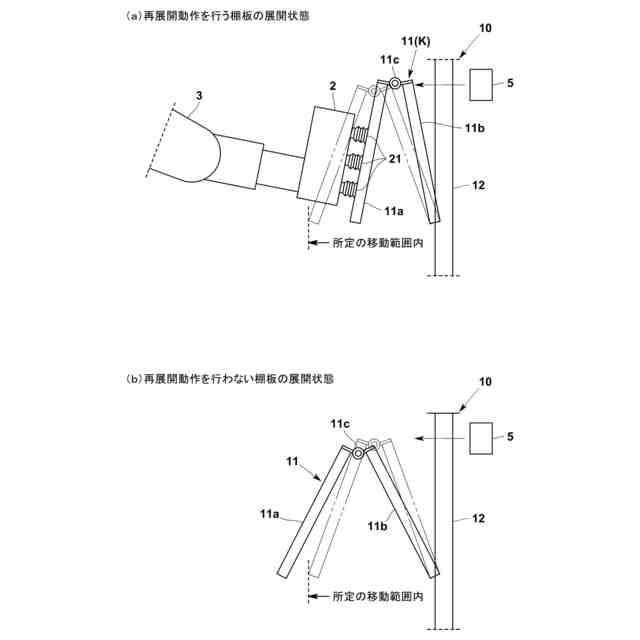
前記制御部は、前記棚板の展開動作が失敗した場合であって、前記状態センサにより得られた前記棚板の展開状態が初期の折畳状態から所定の移動範囲内に含まれる場合に、前記保持ヘッド及び前記ロボットアームを制御して前記棚板の再展開動作を行わせる、請求項1又は2に記載の折畳棚展開装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、卵パックを収容する移動式のラックに設けられた折り畳み式の棚板を展開する折畳棚展開装置に関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
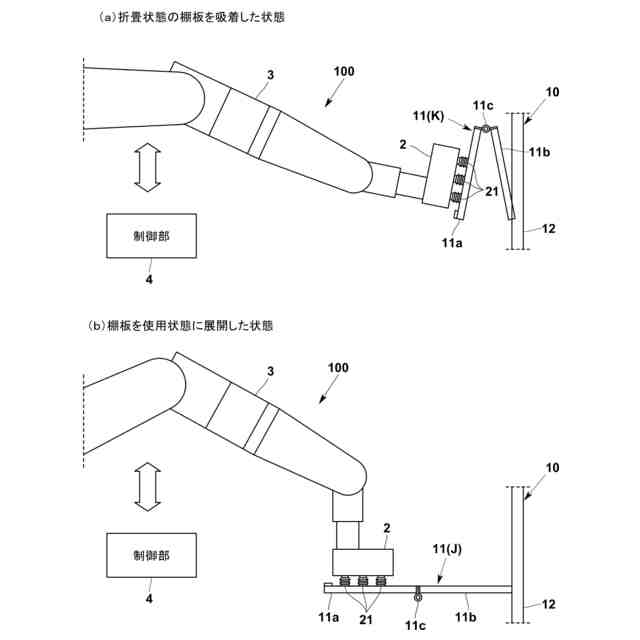
複数の卵パックを収容する移動式のラック(以下、ロールインナーともいう。)は、複数枚の折り畳み式の棚板を有しており、棚板は手前側に引き出されて卵パックが載置される使用状態と、折り畳まれて奥側に位置する折畳状態とで変更できるように構成されている。
【0003】
そして従来、特許文献1に示すように、ロールインナーに対して折畳状態の棚板を使用状態に展開させるロボットシステムが考えられている。このロボットシステムは、ロボットヘッドにより折畳状態の棚板を吸着し、その状態のままロボットヘッドを手前側に移動させて折り畳み式の棚板を展開する。
【0004】
しかしながら、ロールインナーは各所の寸法にばらつきがあり、また、棚板の展開前の初期位置(折畳状態)は、ロールインナーが搬送される際の振動などによりばらつきある。これらの要因により、従来のロボットシステムでは、折畳状態の棚板に対する吸着が失敗したり、折畳状態から使用状態への展開が失敗したりする場合がある。
【先行技術文献】
【特許文献】
【0005】
特開2021-127250号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、本発明は、上記問題点を解決すべくなされたものであり、卵パックを収容する移動式のラックに設けられた折り畳み式の棚板を展開する折畳棚展開装置において、棚板の展開が失敗する確率を低減することを課題とするものである。
【課題を解決するための手段】
【0007】
すなわち本発明に係る折畳棚展開装置は、卵パックを収容する移動式のラックに設けられた折り畳み式の棚板を展開する折畳棚展開装置であって、前記棚板を保持する保持ヘッドと、前記保持ヘッドの位置及び姿勢を変更可能なロボットアームと、前記保持ヘッド及び前記ロボットアームを制御して前記棚板の展開動作を行わせる制御部とを備え、前記制御部は、前記棚板の展開動作が失敗した場合に、前記保持ヘッド及び前記ロボットアームを制御して前記棚板の再展開動作を行わせることを特徴とする。
【0008】
このような折畳棚展開装置であれば、棚板の展開動作が失敗した場合に、保持ヘッド及びロボットアームを制御して棚板の再展開動作を行わせるので、棚板の展開が失敗する確率を低減することができる。
【0009】
前記制御部は、前記再展開動作を行わせる場合に、前記保持ヘッドにより前記棚板を保持する位置、保持する角度又は前記保持ヘッドの移動経路を、失敗した前記展開動作とは異ならせることが望ましい。
この構成であれば、再展開動作を行わせる場合に、棚板を保持する位置、保持する角度又は保持ヘッドの移動経路を異ならせるので、同じ失敗を繰り返さないようにでき、棚板の展開が失敗する確率を低減することができる。
【0010】
棚板が中途半端に展開した状態で、再展開動作を行った場合、保持ヘッド及び棚板が衝突して破損する虞がある。このため、本発明に係る折畳棚展開装置は、前記棚板の展開状態を検出する状態センサを更に備え、前記制御部は、前記棚板の展開動作が失敗した場合であって、前記状態センサにより得られた前記棚板の展開状態が初期の折畳状態から所定の移動範囲内に含まれる場合に、前記保持ヘッド及び前記ロボットアームを制御して前記棚板の再展開動作を行わせることが望ましい。
この構成であれば、棚板の展開状態が初期の折畳状態から所定の移動範囲内に含まれる場合に棚板の再展開動作を行うので、保持ヘッド及び棚板が衝突して破損することを防止できる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ナベル
折畳棚展開装置
6日前
株式会社ナベル
卵パックの移載ロボットシステム
26日前
個人
木製ハンマー
29日前
個人
関節モジュール
16日前
個人
寸切りボルト回し
12日前
個人
スロットルトリガー
26日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
7か月前
株式会社ツノダ
挟持工具
5か月前
コクヨ株式会社
補助器具
6日前
川崎重工業株式会社
ハンド
7か月前
株式会社右川ゴム製造所
把持装置
5か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
衝撃工具
2か月前
個人
メンテナンス用スタンド
2か月前
学校法人立命館
ロボットハンド
6か月前
オムロン株式会社
電動把持工具
5日前
川崎重工業株式会社
罫書用治具
3か月前
学校法人立命館
グリッパ
19日前
トヨタ自動車株式会社
ロボット
1か月前
株式会社マキタ
動力工具
3か月前
学校法人立命館
グリッパ
6か月前
東京計器株式会社
接触検知装置
1か月前
CKD株式会社
把持装置
26日前
株式会社ダイヘン
搬送装置
3か月前
トヨタ自動車株式会社
ハンド構造
3か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
白山工業株式会社
ロボットアーム
23日前
株式会社ハーモ
開閉チャック装置
1か月前
株式会社ダイヘン
搬送装置
3か月前
個人
回転工具およびバリ取り部品
1か月前
個人
プーリーキー抜き治具
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ