TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024123533
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023031035
出願日
2023-03-01
発明の名称
ロボットシステム
出願人
ニデック株式会社
代理人
弁理士法人 佐野特許事務所
主分類
B25J
19/02 20060101AFI20240905BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】力覚センサの校正の作業効率を向上できるロボットシステム及びロボットシステムの校正方法を提供する。
【解決手段】ロボットシステムは、可動部110と、ツール10と、制御部と、を備える。ツールは、力覚センサ20を介して可動部に装着されている。制御部は、可動部を駆動する。制御部は、力覚センサの校正を行う校正モードを実行可能である。校正モードの実行時に、所定の作用部材にツールが接触した状態で、制御部は、可動部を駆動して力覚センサが検出する検出値に基づいて力覚センサの校正を行う。
【選択図】図4
特許請求の範囲
【請求項1】
可動部と、
力覚センサを介して前記可動部に装着されているツールと、
前記可動部を駆動して前記ツールを移動させる制御部と、を備えるロボットシステムにおいて、
前記制御部は、前記力覚センサの校正を行う校正モードを実行可能であり、
前記校正モードの実行時に、所定の作用部材に前記ツールが接触した状態で、前記制御部は、前記可動部を駆動して前記力覚センサが検出する検出値に基づいて前記力覚センサの校正を行う、ロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記校正モードの実行時に、前記制御部は、所定のトルク値で前記作用部材を加圧し、前記トルク値と前記力覚センサが検出した検出値とに基づいて前記力覚センサの校正を行う、請求項1に記載のロボットシステム。
【請求項3】
前記作用部材は、前記ツールと接触する平面状の押圧面を有し、
前記校正モードの実行時に、前記制御部は、前記押圧面と直交する方向に対して傾いた方向に前記作用部材を加圧する、請求項1又は請求項2に記載のロボットシステム。
【請求項4】
前記作用部材が、弾性変形可能な弾性部材を有し、
前記校正モードの実行時に、前記制御部は、前記弾性部材の変形により算出される弾性力と前記力覚センサが検出する検出値とに基づいて前記力覚センサの校正を行う、請求項1に記載のロボットシステム。
【請求項5】
前記作用部材が、前記ツールに固定された錘であり、
前記校正モードの実行時に、前記制御部は、前記ツールを所定加速度で移動させたときに算出される前記錘に掛かる慣性力と前記力覚センサが検出する検出値とに基づいて前記力覚センサの校正を行う、請求項1に記載のロボットシステム。
【請求項6】
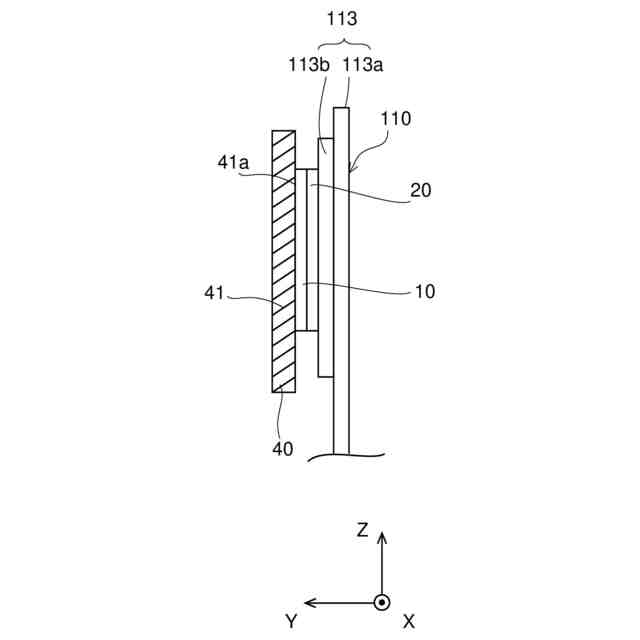
前記可動部は、相対的に移動可能な少なくとも一対の移動部を有し、
前記ツールは、前記移動部の一方に前記力覚センサを介して装着され、
前記校正モードの実行時に、前記移動部の他方を前記作用部材として機能させる、請求項1に記載のロボットシステム。
【請求項7】
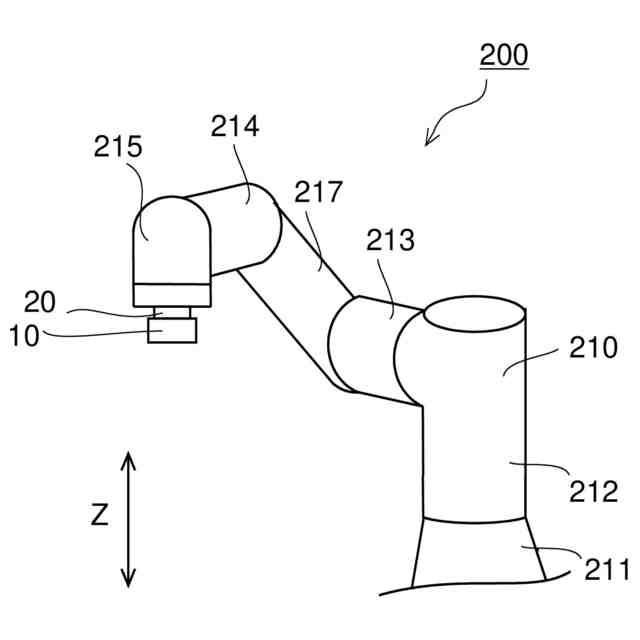
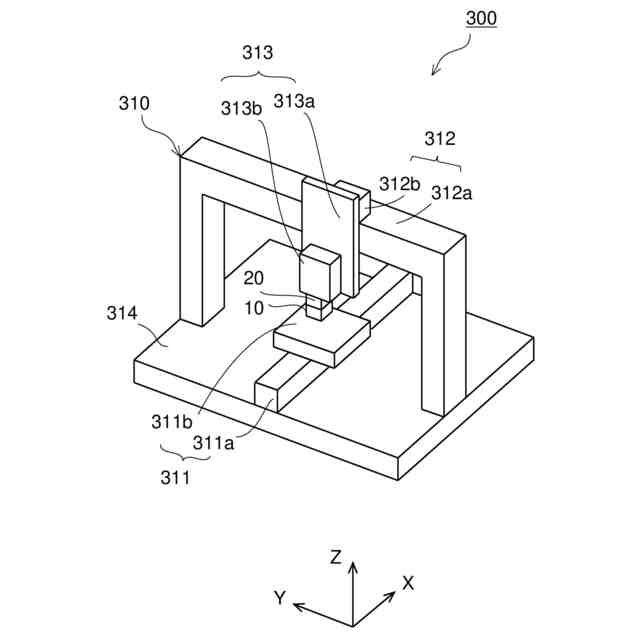
前記可動部は、互いに直交する3軸方向に移動可能である、請求項1に記載のロボットシステム。
【請求項8】
前記可動部は、6軸方向に移動可能である、請求項1に記載のロボットシステム。
【請求項9】
前記校正モードの実行時に、前記制御部は、所定のトルク値で前記作用部材を複数回加圧し、前記力覚センサが検出した検出値の平均値に基づいて前記力覚センサの校正を行う、請求項1に記載のロボットシステム。
【請求項10】
可動部と、
力覚センサを介して前記可動部に装着されているツールと、
前記可動部を駆動する制御部と、を備えるロボットシステムの校正方法において、
前記制御部が、所定の作用部材に前記ツールを接触させた状態で、前記可動部を駆動する作用工程と、
前記作用工程において前記力覚センサが検出した検出値に基づいて前記力覚センサの校正を行う校正工程と、を有する、ロボットシステムの校正方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来のロボットシステムは特許文献1に開示されている。このロボットシステムは、ロボットアームと、ツールと、制御部と、を備える。ツールは、力検出部(力覚センサ)を介してロボットアームに装着されている。力検出部は、ロボットアームに対して着脱可能であり、ツールに掛かる力を検出する。
【0003】
出荷時に校正済みとなった力検出部は、実際の使用環境下において、ロボットアームの駆動によりツールに掛かる力と、検出される検出値との間にばらつき(感度のズレ)が発生する可能性があった。このため、力検出部をロボットアームから外して校正装置を用いて校正を行う(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2021-146445号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記特許文献に開示されたロボットシステムによると、力検出部の校正の作業効率が悪い可能性があった。
【0006】
本発明は、力覚センサの校正の作業効率を向上できるロボットシステム及びロボットシステムの校正方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の例示的なロボットシステムは、可動部と、ツールと、制御部と、を備える。ツールは、力覚センサを介して可動部に装着されている。制御部は、可動部を駆動する。制御部は、力覚センサの校正を行う校正モードを実行可能である。校正モードの実行時に、所定の作用部材にツールが接触した状態で、制御部は、可動部を駆動して力覚センサが検出する検出値に基づいて力覚センサの校正を行う。
【発明の効果】
【0008】
例示的な本発明によれば、力覚センサの校正の作業効率を向上できるロボットシステム及びロボットシステムの校正方法を提供することができる。
【図面の簡単な説明】
【0009】
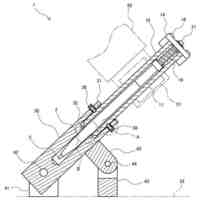
図1は、本発明の第1実施形態に係るロボットシステムの全体構成図である。
図2は、本発明の第1実施形態に係るロボットシステムのハードウェア構成を示すブロック図である。
図3は、本発明の第1実施形態に係るロボットシステムの校正方法を示すフローチャートである。
図4は、本発明の第1実施形態に係るロボットシステムの校正方法を説明する説明図である。
図5は、本発明の第2実施形態に係るロボットシステムの校正方法を説明する説明図である。
図6は、本発明の第3実施形態に係るロボットシステムの全体構成図である。
図7は、本発明の第3実施形態に係るロボットシステムのハードウェア構成を示すブロック図である。
図8は、本発明の第3実施形態に係るロボットシステムの校正方法を説明する説明図である。
図9は、本発明の第4実施形態に係るロボットシステムの全体構成図である。
図10は、本発明の第4実施形態に係るロボットシステムのハードウェア構成を示すブロック図である。
図11は、本発明の第4実施形態に係るロボットシステムの校正方法を説明する説明図である。
【発明を実施するための形態】
【0010】
以下、本発明の例示的な実施形態について、図面を参照しながら詳細に説明する。なお、本明細書では、上下方向は単に説明のための用いられる名称であって、実際の位置関係及び方向を限定しない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
1か月前
個人
関節モジュール
18日前
個人
寸切りボルト回し
14日前
個人
スロットルトリガー
28日前
太陽工業株式会社
チャック装置
1日前
コクヨ株式会社
補助器具
8日前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
衝撃工具
2か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
個人
メンテナンス用スタンド
2か月前
CKD株式会社
把持装置
28日前
トヨタ自動車株式会社
ロボット
1か月前
オムロン株式会社
電動把持工具
7日前
川崎重工業株式会社
罫書用治具
3か月前
東京計器株式会社
接触検知装置
1か月前
学校法人立命館
グリッパ
21日前
個人
回転工具およびバリ取り部品
1か月前
トヨタ自動車株式会社
ハンド構造
3か月前
株式会社ハーモ
開閉チャック装置
1か月前
個人
容器引っ掛け棒およびその使用方法
2か月前
白山工業株式会社
ロボットアーム
25日前
国立大学法人佐賀大学
協働システム
29日前
川崎重工業株式会社
ロボット
21日前
トヨタ自動車株式会社
締付判定方法
1か月前
株式会社日本キャリア工業
ロボットハンド
2か月前
株式会社大林組
ロッカー装置
1か月前
マックス株式会社
打ち込み工具
2か月前
株式会社AKプランツ
中腰用アシストスーツ
29日前
工機ホールディングス株式会社
作業機
1か月前
マックス株式会社
打ち込み工具
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
フジセン技工株式会社
マーキング装置
14日前
工機ホールディングス株式会社
作業機
11日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ