TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024117568
公報種別
公開特許公報(A)
公開日
2024-08-29
出願番号
2023023732
出願日
2023-02-17
発明の名称
パラレルリンクロボット
出願人
ムラテックメカトロニクス株式会社
代理人
個人
主分類
B25J
11/00 20060101AFI20240822BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ボール軸受のメンテナンス時に受け部材からソケットの脱落を防止する。
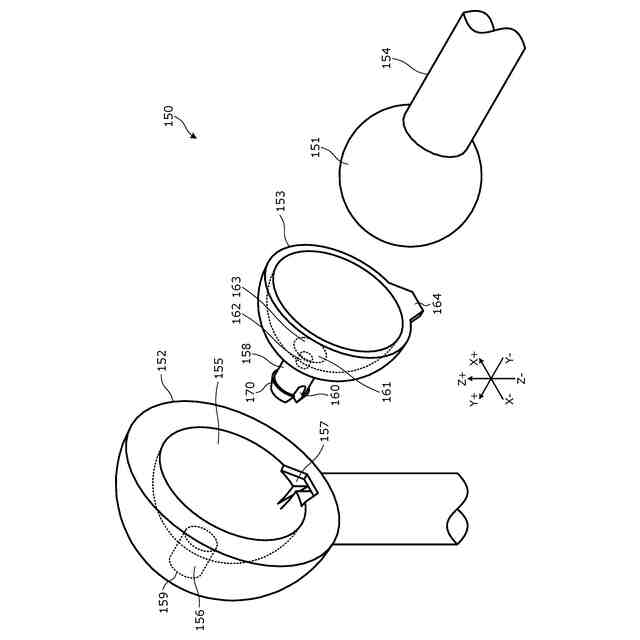
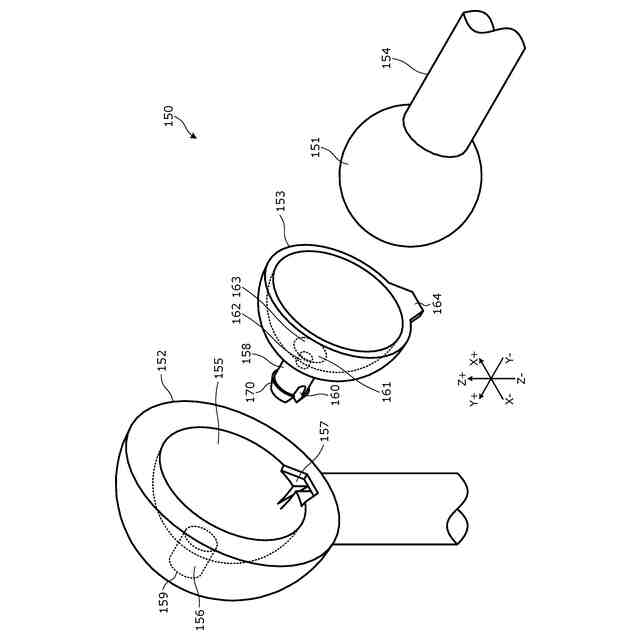
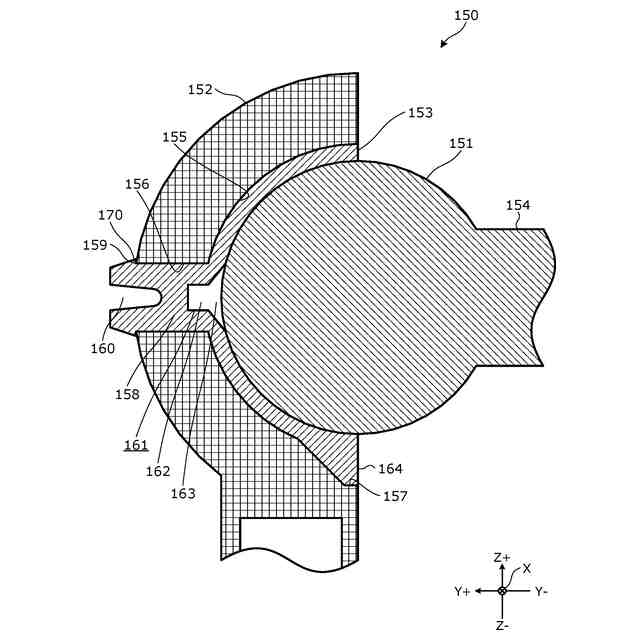
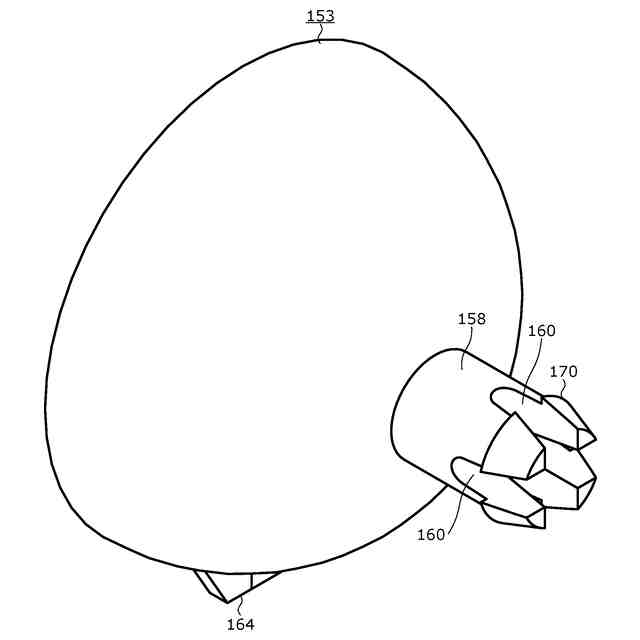
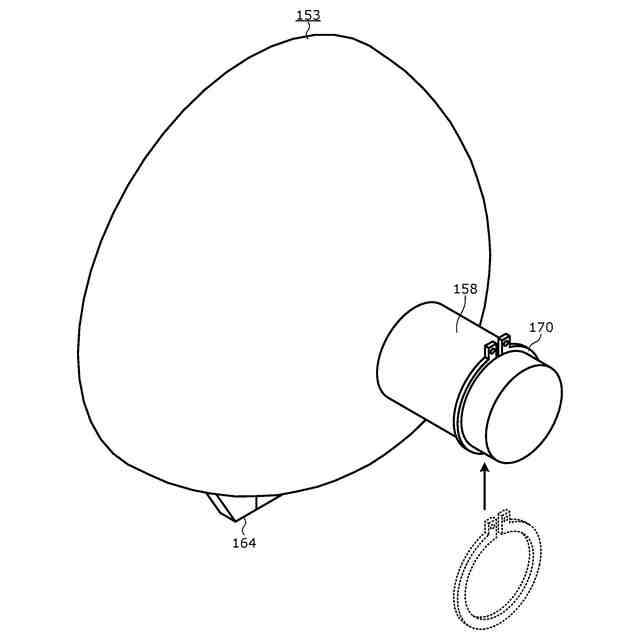
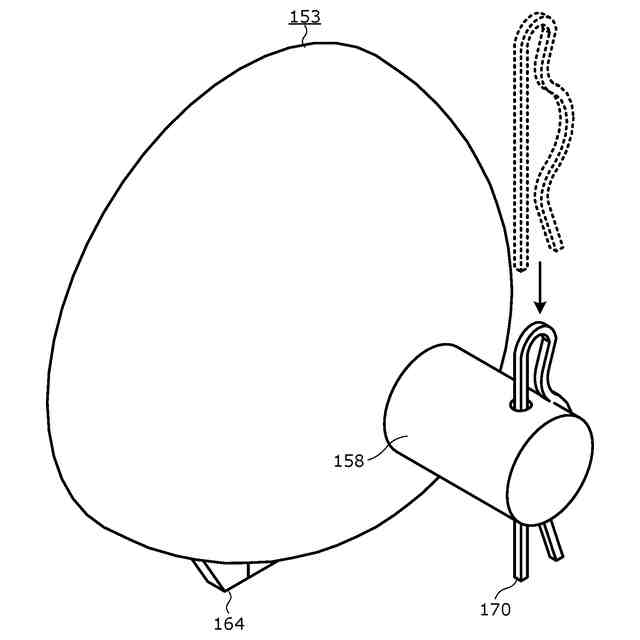
【解決手段】ボール継手150は、球状の摺動部材151と、摺動部材151を収容する受け部材152と、受け部材152の装着座155と摺動部材151との間に配置されるソケット153と、を備え、受け部材152は、内側から外側まで貫通する貫通孔156を備え、ソケット153は、貫通孔156に刺し通され、装着座155の反対側に位置する外側開口159から突出する軸部158を備え、ボール継手150は、軸部158の突出部分に設けられ、受け部材152の外側開口159の周縁部に係合して受け部材152からソケット153の脱落を防止する係合部材170を備えるパラレルリンクロボット。
【選択図】図2
特許請求の範囲
【請求項1】
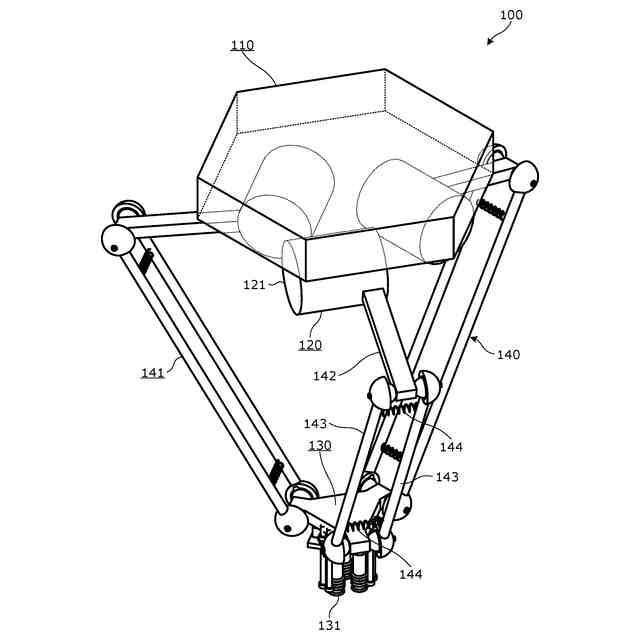
ベースとヘッドとの間が複数のボール継手、および複数のリンク介して接続されるパラレルリンクロボットであって、
前記ボール継手は、
球状の部分を有する摺動部材と、
前記摺動部材の球状部分の一部を収容するドーム状の窪みである装着座を有する受け部材と、
前記受け部材の前記装着座と前記摺動部材との間に配置されるソケットと、を備え、
前記受け部材は、
内側から外側まで貫通する貫通孔を備え、
前記ソケットは、
前記貫通孔に刺し通され、前記装着座の反対側に位置する外側開口から突出する突出部分を有する軸部を備え、
前記ボール継手は、
前記突出部分に設けられ、前記受け部材の外側開口の周縁部に係合する係合部材を備える
パラレルリンクロボット。
続きを表示(約 630 文字)
【請求項2】
前記係合部材は、前記突出部分に一体に形成される
請求項1に記載のパラレルリンクロボット。
【請求項3】
前記係合部材は、前記受け部材の外側開口から突出した前記突出部分に着脱可能に取り付けられる
請求項1に記載のパラレルリンクロボット。
【請求項4】
前記ソケットは、
前記軸部を径方向に分断する切込み部を備える
請求項1または2に記載のパラレルリンクロボット。
【請求項5】
前記ソケットは、
前記摺動部材と接する内側の面に開口し、前記軸部の内にまで到達する凹状のグリース溜を備える
請求項1に記載のパラレルリンクロボット。
【請求項6】
前記グリース溜は、
前記軸部の反対側に向かって開口する筒状部と拡径部とを備える
請求項5に記載のパラレルリンクロボット。
【請求項7】
前記摺動部材と前記ソケットとの間が、フッ素系合成油、およびフッ素系樹脂で構成されたグリースで潤滑してある
請求項1記載のパラレルリンクロボット。
【請求項8】
前記ソケットは、
ドーム形状部分の開口端から径方向外側に向かって突出する係合突起を備え、
前記受け部材は、
前記係合突起が嵌め込まれる係合凹部を備える
請求項1に記載のパラレルリンクロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、パラレルリンクメカニズムを備えるパラレルリンクロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に記載のパラレルリンクメカニズムが備えるボール継手は、ばねの付勢力により樹脂製のソケットと球状の摺動部材とが常に押し付けられた状態となっている。このようなパラレルリンクメカニズムを備えたパラレルリンクロボットにおいては、押しつけられたソケットと摺動部材とが高速で擦れ合うため、摺動面には摩耗を抑制するためのグリースが塗布されている。
【先行技術文献】
【特許文献】
【0003】
特許第4803841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、ボール継手をメンテナンスする際に、ソケットを保持する受け部材からボール軸を外すが、球状の摺動部材とドーム状のソケットとがグリースなどによって密着し、ソケットが受け部材から抜けるという現象が発生する場合がある。
【0005】
本発明は、上記課題に鑑みなされたものであり、ボール継手のメンテナンス時において、樹脂製のソケットと球状の摺動部材とを容易に分離することができるパラレルリンクロボットの提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の1つであるパラレルリンクロボットは、ベースとヘッドとの間が複数のボール継手、および複数のリンク介して接続されるパラレルリンクロボットであって、前記ボール継手は、球状の部分を有する摺動部材と、前記摺動部材の球状部分の一部を収容するドーム状の窪みである装着座を有する受け部材と、前記受け部材の前記装着座と前記摺動部材との間に配置されるソケットと、を備え、前記受け部材は、内側から外側まで貫通する貫通孔を備え、前記ソケットは、前記貫通孔に刺し通され、前記装着座の反対側に位置する外側開口から突出する突出部分を有する軸部を備え、前記ボール継手は、前記突出部分に設けられ、前記受け部材の外側開口の周縁部に係合する係合部材を備える。
【発明の効果】
【0007】
本発明によれば、樹脂製のソケットが受け部材に対し係合部材を介して係合するため、ソケットと摺動部材とを分離する際に、受け部材からソケットが脱落することを防止できる。
【図面の簡単な説明】
【0008】
パラレルリンクロボットの例を模式的に示す斜視図である。
ボール継手を分解した状態で示す斜視図である。
ボール継手を示す断面図である。
ソケットの別例1を示す斜視図である。
ソケットの別例2と係合部材の別例1を示す斜視図である。
ソケットの別例3と係合部材の別例2を示す斜視図である。
【発明を実施するための形態】
【0009】
以下、本発明に係るパラレルリンクロボットの実施の形態について、図面を参照しつつ説明する。なお、以下の実施の形態は、本発明を説明するために一例を挙示するものであり、本発明を限定する主旨ではない。例えば、以下の実施の形態において示される形状、構造、材料、構成要素、相対的位置関係、接続状態、数値、数式、方法における各段階の内容、各段階の順序などは、一例であり、以下に記載されていない内容を含む場合がある。また、平行、直交などの幾何学的な表現を用いる場合があるが、これらの表現は、数学的な厳密さを示すものではなく、実質的に許容される誤差、ずれなどが含まれる。また、同時、同一などの表現も、実質的に許容される範囲を含んでいる。
【0010】
また、図面は、本発明を説明するために適宜強調、省略、または比率の調整を行った模式的な図となっており、実際の形状、位置関係、および比率とは異なる。また、図中に示す場合があるX軸、Y軸、Z軸は、図の説明のために任意に設定した直交座標を示している。つまりZ軸は、鉛直方向に沿う軸とは限らず、X軸、Y軸は、水平面内に存在するとは限らない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
29日前
個人
関節モジュール
16日前
個人
寸切りボルト回し
12日前
個人
スロットルトリガー
26日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
7か月前
株式会社ツノダ
挟持工具
5か月前
コクヨ株式会社
補助器具
6日前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
動力工具
1か月前
日東工器株式会社
衝撃工具
2か月前
日東工器株式会社
動力工具
1か月前
株式会社右川ゴム製造所
把持装置
5か月前
川崎重工業株式会社
ハンド
7か月前
日東工器株式会社
動力工具
1か月前
個人
メンテナンス用スタンド
2か月前
CKD株式会社
把持装置
26日前
オムロン株式会社
電動把持工具
5日前
トヨタ自動車株式会社
ロボット
1か月前
東京計器株式会社
接触検知装置
1か月前
川崎重工業株式会社
罫書用治具
3か月前
学校法人立命館
グリッパ
6か月前
学校法人立命館
ロボットハンド
6か月前
学校法人立命館
グリッパ
19日前
株式会社マキタ
動力工具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ハーモ
開閉チャック装置
1か月前
白山工業株式会社
ロボットアーム
23日前
個人
容器引っ掛け棒およびその使用方法
2か月前
個人
回転工具およびバリ取り部品
1か月前
トヨタ自動車株式会社
ハンド構造
3か月前
個人
プーリーキー抜き治具
6か月前
株式会社不二越
予測システム
7か月前
宮川工機株式会社
板状部品移動装置
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































