TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024113270
公報種別
公開特許公報(A)
公開日
2024-08-22
出願番号
2023018127
出願日
2023-02-09
発明の名称
産業機器用制御システム及びノイズフィルタ
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
19/00 20060101AFI20240815BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ノイズ耐性の向上を図りつつ通信量の増加に対応可能な産業機器用制御システムを実現すること。
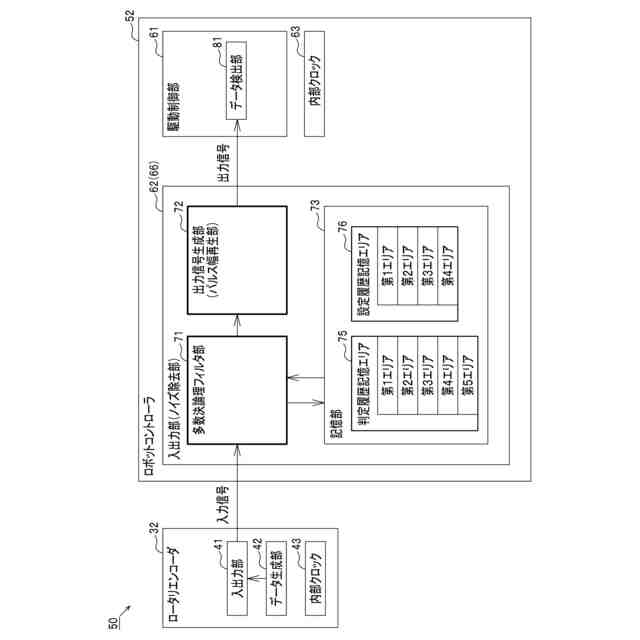
【解決手段】ロボット15は、サーボモータ31及びロータリエンコーダ32が搭載されたロボット本体21と、ロボット本体21を制御するロボットコントローラ52とを備えている。ロータリエンコーダ32は信号線93を介してロボットコントローラ52の入出力部62に接続されており、入出力部62にはロータリエンコーダ32から入力信号が入力される。入出力部62では、ノイズ除去部66におけるフィルタ処理を経てノイズが除去された出力信号が生成され、当該出力信号は駆動制御部61へ出力されることとなる。ノイズ除去部66には、多数決によって多数派となる論理値を特定する多数決論理フィルタ部と、多数決論理フィルタ部による多数決結果を踏まえて出力信号を生成する出力信号生成部とが設けられている。
【選択図】 図3
特許請求の範囲
【請求項1】
産業機器を対象として制御を行う産業機器用制御システムであって、
入力された入力信号をフィルタ処理し当該フィルタ処理を経ることでノイズを除去した信号を出力信号として出力する入出力部を備え、
前記入力信号は、予め設定されている単位期間に亘って値が一定となるようにして生成される信号であり、
前記入出力部は、前記フィルタ処理を実行する手段として、
前記単位期間よりも短くなるように設定された判定周期毎に前記入力信号の値を判定し、当該判定を前記単位期間内で複数回繰り返すように構成された判定手段と、
前記判定手段による所定回数分の判定結果について最も多く判定された値を特定する特定手段と、
前記特定手段による特定結果に応じた信号となるようにして前記出力信号を生成可能な生成手段と
を有している産業機器用制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記所定回数は、前記単位期間を前記判定周期で除した数以下の整数となるように設定されており、
前記特定手段による前記特定は周期的に実行される構成となっており、
前記特定手段により前記特定が行われる周期の長さは、前記判定周期の長さ以上且つ前記単位期間の長さ以下となるように設定されている請求項1に記載の産業機器用制御システム。
【請求項3】
前記所定回数は、前記単位期間を前記判定周期で除した数と一致するように規定されており、
直近となる前記所定回数分の前記判定結果を記憶する記憶手段を備え、
前記特定手段は、前記判定手段による前記判定の都度、前記記憶手段に記憶されている前記判定結果に基づいて前記特定を行う請求項1又は請求項2に記載の産業機器用制御システム。
【請求項4】
前記入力信号は、第1所定値及び第2所定値の何れかとなる二値信号であり、
前記特定手段は、前記所定回数分の判定結果について前記第1所定値となった回数と前記第2所定値となった回数とを比較することにより前記第1所定値及び前記第2所定値のうち判定された回数が多数となる一方を特定し、
前記生成手段は、
前記特定手段による特定結果が前記第1所定値となった回数が多数であるとする第1結果となった場合に前記出力信号として第1信号を生成する手段と、前記特定手段による特定結果が前記第2所定値となっている回数が多数であるとする第2結果となった場合に前記出力信号として第2信号を生成する手段とを有し、
前記第1信号及び前記第2信号の一方の出力が開始されてから前記判定周期よりも長く且つ前記単位期間よりも短い期間である所定期間が経過するまでは、前記特定手段による前記特定及び前記特定手段による特定結果の何れかを無効とし、前記一方の出力が継続されるようにして前記出力信号を生成する請求項1に記載の産業機器用制御システム。
【請求項5】
産業機器を対象として制御を行う産業機器用制御システムに適用され、入力された入力信号をフィルタ処理し当該フィルタ処理を経ることでノイズを除去した信号を出力信号として出力するノイズフィルタであって、
前記入力信号は、予め設定されている単位期間に亘って値が一定となるようにして生成される信号であり、
前記単位期間よりも短くなるように設定された判定周期毎に前記入力信号の値を判定し、当該判定を前記単位期間内で複数回繰り返すように構成された判定手段と、
前記判定手段による所定回数分の判定結果について最も多く判定された値を特定する特定手段と、
前記特定手段による特定結果に応じた信号となるようにして前記出力信号を生成可能な生成手段と
を有しているノイズフィルタ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業機器用制御システム及び産業機器用制御システムに適用されるノイズフィルタに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
工場等で用いられる産業用ロボット等の産業機器には、ソレノイドやサーボモータ等の電動式アクチュエータが搭載されているものがある。この種の産業機器においては、電動式アクチュエータへ駆動電力を供給するための電源線をノイズ源としたノイズ(高電圧サージノイズ)が信号線に印加される可能性がある。特に強電線である電源線と弱電線である信号線とが近接配置される場合にはそのような懸念が一層強くなる。また、工場においては産業機器が多数設置されることが多く、他の産業機器の電源線等がノイズ源になる可能性もある。信号線に印加されたノイズによって信号の送受信が適切に行われなくなることは、産業機器の動作安定性等を損なう要因になる。そこで、産業機器用の制御システムにおいては、ノイズの影響を抑えるべく、ノイズ除去用のフィルタ回路(ノイズフィルタ)を搭載するといった対策が講じられている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-63406号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年では、産業機器の多機能化や高機能化等の様々な理由から制御システムにおける通信量は増加傾向にある。例えば、産業用ロボットにおいては、多関節化や安全機能の実装要求によって通信量が増加している。ここで、上述したフィルタ回路を用いてノイズの影響を抑えることには技術的意義があるものの、通信量の増加によって以下の懸念が顕在化する。すなわち、産業機器用の制御システムではPID制御等の各種制御にて通信データ等を参照するサイクルタイムが予め規定されているが、このサイクルタイムの間延びを抑えつつ通信量の増加に対応しようとすれば、送受信の効率化(通信の高速化)を実現する必要が生じる。ここで、ノイズ耐性の向上を図る上でノイズを除去するための所要期間が嵩むことは、その妨げになる。このように、産業機器用の制御システムにおいては、ノイズ耐性の向上を図りつつ通信量の増加に対応する上でノイズの除去に係る構成に未だ改善の余地がある。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、ノイズ耐性の向上を図りつつ通信量の増加に対応可能な産業機器用制御システムを実現することにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段について記載する。
【0007】
第1の手段.産業機器を対象として制御を行う産業機器用制御システムであって、
入力された入力信号をフィルタ処理し当該フィルタ処理を経ることでノイズを除去した信号を出力信号として出力する入出力部を備え、
前記入力信号は、予め設定されている単位期間に亘って値が一定となるようにして生成される信号であり、
前記入出力部は、前記フィルタ処理を実行する手段として、
前記単位期間よりも短くなるように設定された判定周期毎に前記入力信号の値を判定し、当該判定を前記単位期間内で複数回繰り返すように構成された判定手段と、
前記判定手段による所定回数分の判定結果について最も多く判定された値を特定する特定手段と、
前記特定手段による特定結果に応じた信号となるようにして前記出力信号を生成可能な生成手段と
を有している。
【0008】
上記構成によれば、判定手段による所定回数分の判定結果について最も多く判定された入力信号の値を特定し、その特定結果に応じた信号となるようにして出力信号が生成される。入力信号にノイズが印加されることで、入力信号の値が部分的(瞬間的)に変化したとしても、当該変化した部分については特定手段による特定→生成手段によって除去し得る。これにより、ノイズの印加(混入)による信号の改変を抑制できる。
【0009】
ここで、上述の如く最も多く判定された値に基づいて出力信号が生成される構成は、以下の理由から、通信量の増加に伴った通信速度の低下を抑制する上で有利である。すなわち、入力信号の幅(上記単位期間)を規定する上では、産業機器自身やその周辺で発生し得るノイズの印加の幅(印加期間)よりも長くすることが好ましい、具体的には印加されるノイズによって本来の信号(値)を適切に検出できなくなることを回避可能な長さとすることが好ましい。一方で、単位期間を過度に長くしてしまうとノイズ耐性の向上が期待できる反面、入力信号が間延びして多量の情報を短期間で送受信することは難しくなる。従来のフィルタのように、入力信号において予め設定された長さよりも短い部分をノイズとして除去する構成では、入力信号がノイズによって前後に分かれる等した場合に各部分が除去され得る。つまり、本来の信号が消失し得る。このような事情を考慮すると、想定されるノイズの印加期間の3倍+αとなるようにして単位期間を設定する必要が生じる。これに対して、第1の手段に示す構成(特定手段等)では、本来の信号の消失を抑制する上で、最も短いパターンでは単位期間を想定されるノイズの印加期間の2倍+αとなるように設定することが可能となる。つまり、単位時間の短縮に寄与できる。これにより、産業機器用制御システムにおける通信量の増加に伴った通信速度の低下を抑制できる。
【0010】
第2の手段.産業機器を対象として制御を行う産業機器用制御システムに適用され、入力された入力信号をフィルタ処理し当該フィルタ処理を経ることでノイズを除去した信号を出力信号として出力するノイズフィルタであって、
前記入力信号は、予め設定されている単位期間に亘って値が一定となるようにして生成される信号であり、
前記単位期間よりも短くなるように設定された判定周期毎に前記入力信号の値を判定し、当該判定を前記単位期間内で複数回繰り返すように構成された判定手段と、
前記判定手段による所定回数分の判定結果について最も多く判定された値を特定する特定手段と、
前記特定手段による特定結果に応じた信号となるようにして前記出力信号を生成可能な生成手段と
を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
24日前
個人
関節モジュール
11日前
個人
寸切りボルト回し
7日前
個人
スロットルトリガー
21日前
日東精工株式会社
搬送装置
5か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
6か月前
株式会社ツノダ
挟持工具
5か月前
コクヨ株式会社
補助器具
1日前
日東工器株式会社
衝撃工具
2か月前
川崎重工業株式会社
ハンド
7か月前
日東工器株式会社
動力工具
28日前
日東工器株式会社
動力工具
28日前
日東工器株式会社
動力工具
28日前
日東工器株式会社
動力工具
28日前
株式会社右川ゴム製造所
把持装置
5か月前
個人
メンテナンス用スタンド
1か月前
株式会社マキタ
動力工具
3か月前
学校法人立命館
グリッパ
6か月前
CKD株式会社
把持装置
21日前
学校法人立命館
グリッパ
14日前
学校法人立命館
ロボットハンド
6か月前
オムロン株式会社
電動把持工具
今日
川崎重工業株式会社
罫書用治具
3か月前
トヨタ自動車株式会社
ロボット
1か月前
東京計器株式会社
接触検知装置
1か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ハーモ
開閉チャック装置
1か月前
トヨタ自動車株式会社
ハンド構造
2か月前
個人
回転工具およびバリ取り部品
1か月前
個人
プーリーキー抜き治具
6か月前
白山工業株式会社
ロボットアーム
18日前
株式会社ダイヘン
搬送装置
3か月前
個人
容器引っ掛け棒およびその使用方法
1か月前
国立大学法人山形大学
二重関節機構
3か月前
株式会社不二越
予測システム
7か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ


































