TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024112203
公報種別
公開特許公報(A)
公開日
2024-08-20
出願番号
2023017120
出願日
2023-02-07
発明の名称
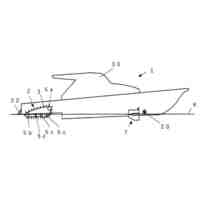
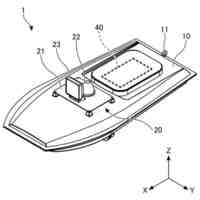
船舶推進機および船舶
出願人
ヤマハ発動機株式会社
代理人
個人
主分類
B63H
1/28 20060101AFI20240813BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
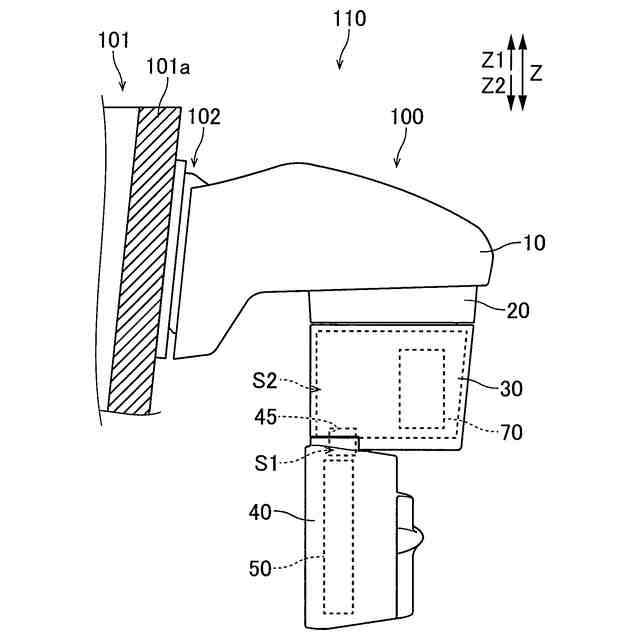
【課題】ステータを含むダクトと、ステータと対向するように配置されたロータを有するリムを含むプロペラと、を備える構成において、ステータとロータとにより構成されるモータの出力を向上させることが可能な船舶推進機を提供する。
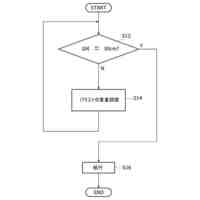
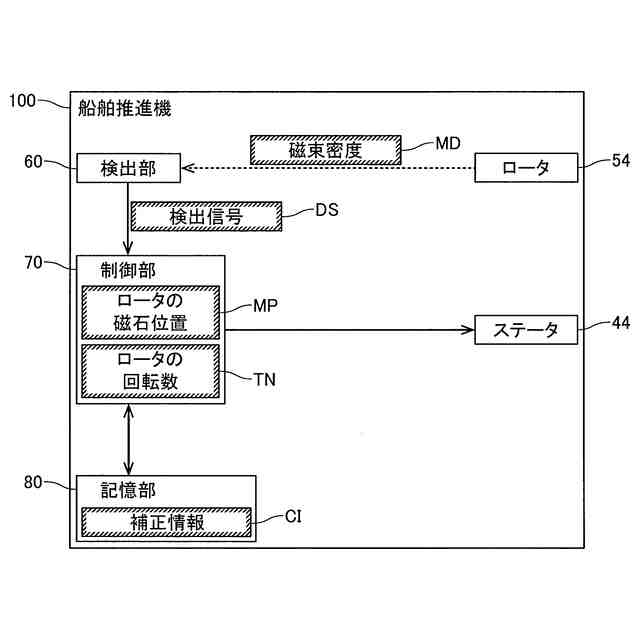
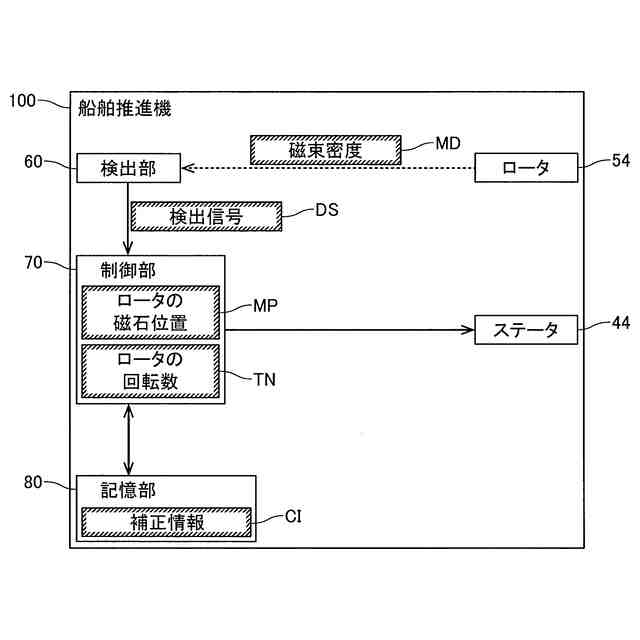
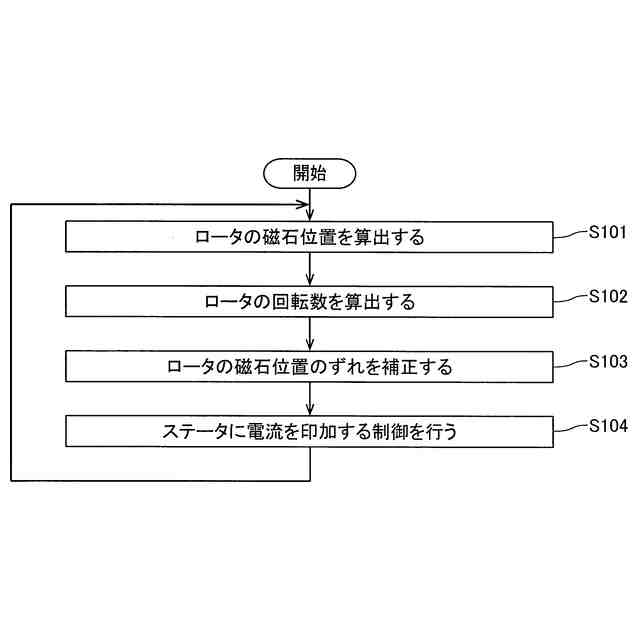
【解決手段】この船舶推進機100では、制御部70は、検出部60により検出された磁束密度MDに基づいて、ロータ54の回転数TNを算出する。そして、制御部70は、算出したロータ54の回転数TNに基づいて、金属製の部材MMに生じる渦電流に起因するロータ54の磁石位置MPのずれを補正する。
【選択図】図6
特許請求の範囲
【請求項1】
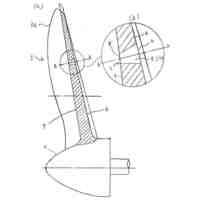
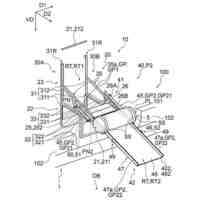
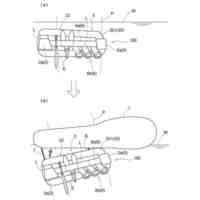
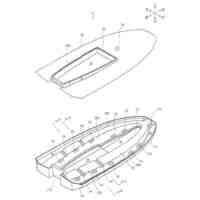
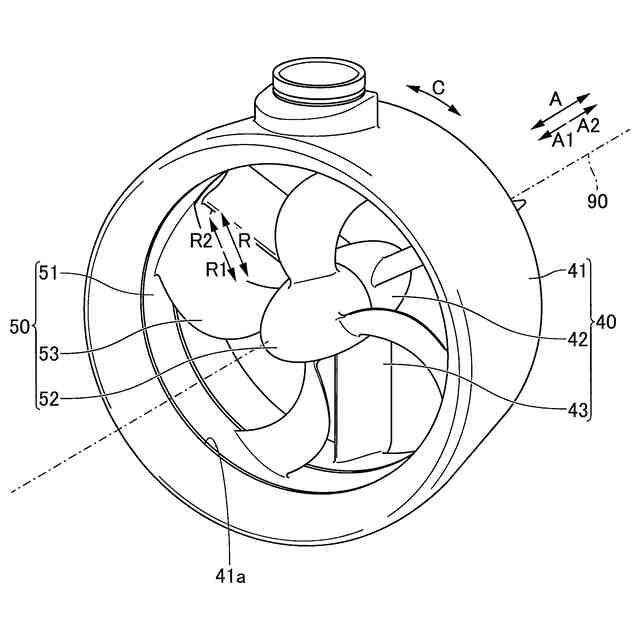
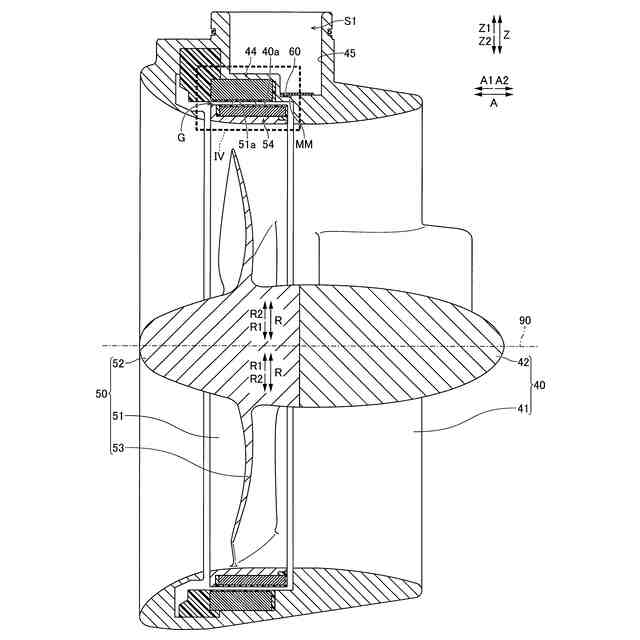
ステータを含むダクトと、
前記ステータと対向するように前記ステータの径方向内側に配置されたロータを有するリムと、前記リムの径方向内側に形成された羽根と、を含むプロペラと、
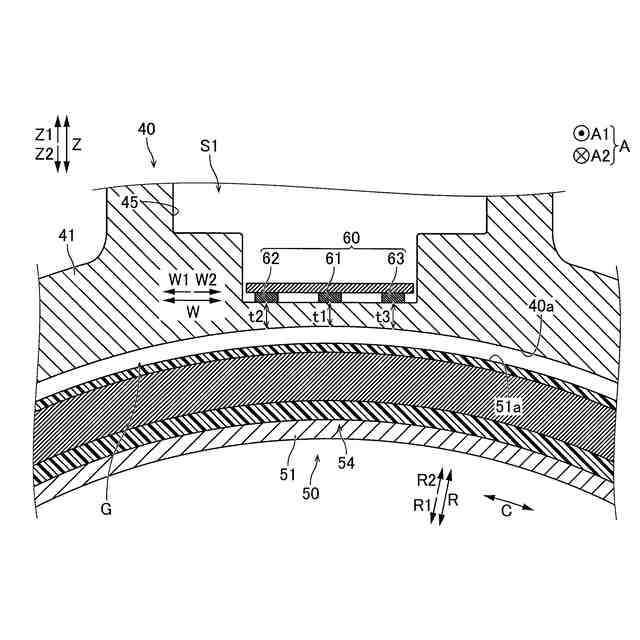
金属製の部材を介して前記ロータに対向するように配置され、前記ロータの磁石によって生じる磁束密度を検出可能な検出部と、
前記検出部により検出された前記磁束密度に基づいて、前記ロータの磁石位置を算出するとともに、算出した前記ロータの磁石位置に基づいて、前記ロータが最大トルクを得ることが可能なタイミングで前記ステータに電流を印加する制御を行う制御部と、を備え、
前記制御部は、前記検出部により検出された前記磁束密度に基づいて、前記ロータの回転数を算出するとともに、算出した前記ロータの回転数に基づいて、前記金属製の部材に生じる渦電流に起因する前記ロータの磁石位置のずれを補正する、船舶推進機。
続きを表示(約 1,200 文字)
【請求項2】
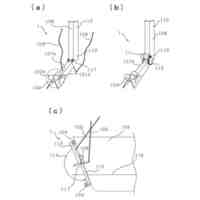
前記検出部は、前記ロータの軸方向において前記ステータと隣り合うように、かつ、前記ロータに対向するように配置されている、請求項1に記載の船舶推進機。
【請求項3】
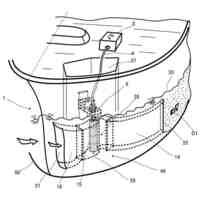
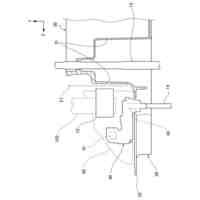
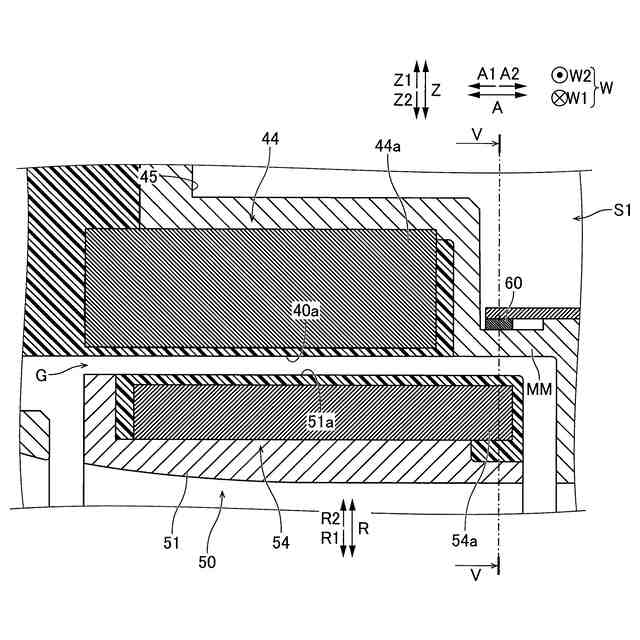
前記検出部は、前記金属製の部材から構成されるとともに前記ダクトのうちの上部に位置する収容部に収容されている、請求項2に記載の船舶推進機。
【請求項4】
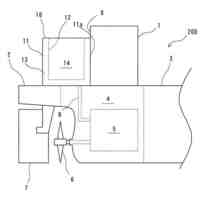
前記ダクトの上方に配置されたハウジングをさらに備え、
前記制御部は、前記ハウジングの内部の空間に収容されており、
前記検出部が収容された前記収容部の空間は、前記制御部が収容された前記ハウジングの内部の空間と繋がっている、請求項3に記載の船舶推進機。
【請求項5】
前記ステータには、3相交流電力が供給されるように構成されており、
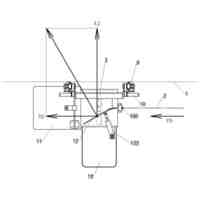
前記検出部は、前記ロータの磁石によって生じる3相の前記磁束密度の各々を検出するように3つ設けられており、
前記制御部は、前記3つの検出部の各々により検出された前記3相の磁束密度のうちのいずれかに基づいて、前記ロータの回転数を算出するとともに、算出した前記ロータの回転数に基づいて、前記3相の磁束密度の各々に基づいて算出したロータの磁石位置の各々のずれを補正する、請求項1に記載の船舶推進機。
【請求項6】
前記3つの検出部の各々は、水平面内において前記ロータの軸方向と直交する整列方向に沿って並ぶように配置されており、
前記ロータと前記3つの検出部のうちの前記整列方向における中央に配置された前記検出部との間の前記金属製の部材の厚みと、前記ロータと前記3つの検出部のうちの前記整列方向における一方側および他方側に配置された前記検出部との間の前記金属製の部材の厚みとは、互いに異なっている、請求項5に記載の船舶推進機。
【請求項7】
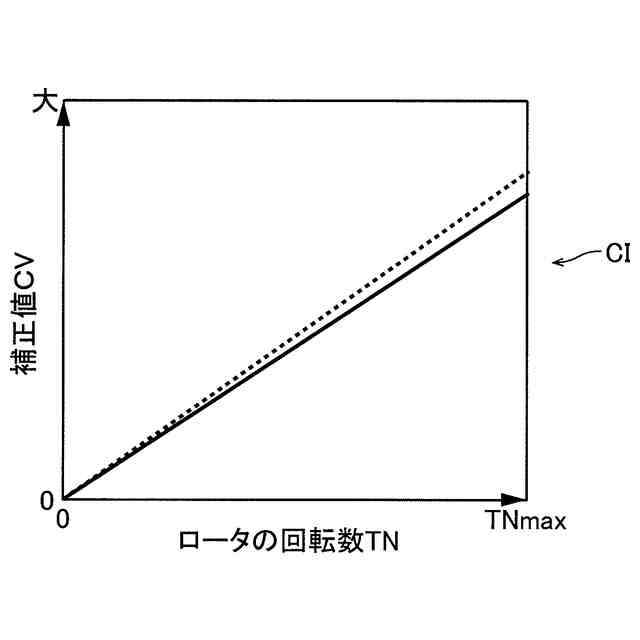
前記ロータの回転数と、前記ロータの磁石位置のずれを補正するための補正値との関係を示す補正情報が記憶された記憶部をさらに備え、
前記制御部は、算出した前記ロータの回転数と、前記補正情報とに基づいて、前記ロータの磁石位置のずれを補正する、請求項1に記載の船舶推進機。
【請求項8】
前記記憶部には、前記ロータの回転数の全域における前記補正情報が記憶されている、請求項7に記載の船舶推進機。
【請求項9】
前記記憶部には、数式、マップおよびテーブルのいずれかによって表される前記補正情報が記憶されている、請求項7に記載の船舶推進機。
【請求項10】
前記記憶部には、前記数式によって表される補正情報が記憶されており、
前記制御部は、算出した前記ロータの回転数と、前記数式によって表される補正情報とに基づいて、前記補正値を算出するとともに、前記算出された補正値に基づいて、前記ロータの磁石位置のずれを補正する、請求項9に記載の船舶推進機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この発明は、船舶推進機および船舶に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、ステータを含むダクトと、ステータと対向するように配置されたロータを有するリムを含むプロペラと、を備える船舶推進機が知られている(たとえば、特許文献1参照)。
【0003】
上記特許文献1には、ステータを含むダクトと、ステータと対向するようにステータの径方向内側に配置されたロータを有するリム、および、リムの径方向内側に形成された羽根を含むプロペラと、を備える船外機(船舶推進機)が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-18646号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、上記特許文献1には記載されていないが、上記特許文献1のような従来の船外機(船舶推進機)は、ロータの磁石によって生じる磁束密度を検出する検出部を備える。また、検出部により検出された磁束密度に基づいて、ロータの磁石位置を算出するとともに、算出したロータの磁石位置に基づいて、ロータが最大トルクを得ることが可能なタイミングでステータに電流を印加する制御を行う制御部を備える。また、検出部が、ロータに対向する位置に配置される。
【0006】
しかしながら、上記特許文献1のような従来の船外機(船舶推進機)では、水中で駆動する船外機の特性上、検出部を防水する必要があるため、検出部が密閉された部材に収容される。一般的に、船外機の筐体は、金属製である。すなわち、検出部が、金属製の部材を介してロータに対向するように配置される。この場合、金属製の部材に生じる渦電流に起因して、ロータの磁石位置にずれが生じる。したがって、上記特許文献1のような従来の船外機(船舶推進機)では、制御部が、算出したロータの磁石位置に基づいて、ロータが最大トルクを得ることが可能なタイミングでステータに電流を印加する制御を行ったとしても、ロータが最大トルクを得ることができない。すなわち、ステータとロータとにより構成されるモータの出力が低下する。このため、ステータを含むダクトと、ステータと対向するように配置されたロータを有するリムを含むプロペラと、を備える構成において、ステータとロータとにより構成されるモータの出力を向上させることが可能な船外機(船舶推進機)および船舶が望まれている。
【0007】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、ステータを含むダクトと、ステータと対向するように配置されたロータを有するリムを含むプロペラと、を備える構成において、ステータとロータとにより構成されるモータの出力を向上させることが可能な船舶推進機および船舶を提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するために、この発明の第1の局面による船舶推進機は、ステータを含むダクトと、ステータと対向するようにステータの径方向内側に配置されたロータを有するリムと、リムの径方向内側に形成された羽根と、を含むプロペラと、金属製の部材を介してロータに対向するように配置され、ロータの磁石によって生じる磁束密度を検出可能な検出部と、検出部により検出された磁束密度に基づいて、ロータの磁石位置を算出するとともに、算出したロータの磁石位置に基づいて、ロータが最大トルクを得ることが可能なタイミングでステータに電流を印加する制御を行う制御部と、を備え、制御部は、検出部により検出された磁束密度に基づいて、ロータの回転数を算出するとともに、算出したロータの回転数に基づいて、金属製の部材に生じる渦電流に起因するロータの磁石位置のずれを補正する。
【0009】
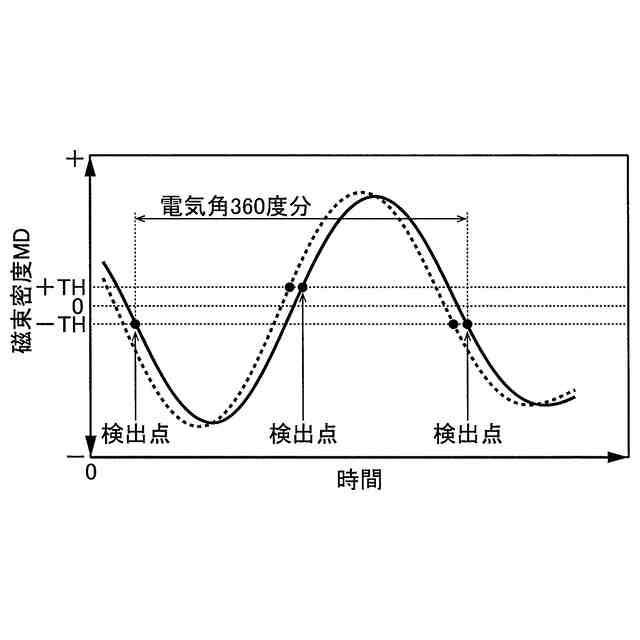
この発明の第1の局面による船舶推進機では、上記のように、制御部は、検出部により検出された磁束密度に基づいて、ロータの回転数を算出するとともに、算出したロータの回転数に基づいて、金属製の部材に生じる渦電流に起因するロータの磁石位置のずれを補正する。これにより、金属製の部材に生じる渦電流に起因してロータの磁石位置にずれが生じたとしても、ロータの回転数に基づいて、金属製の部材に生じる渦電流に起因するロータの磁石位置のずれを補正することができる。なお、ロータの回転数は、磁束密度の電気角360度分に基づいて算出可能なため、ロータの磁石位置にずれが生じている場合でも、正確に検出することができる。したがって、ずれを補正した状態のロータの磁石位置に基づいて、ロータが最大トルクを得ることが可能なタイミングでステータに電流を印加することができる。すなわち、ロータが最大トルクを得ることができる。その結果、ステータを含むダクトと、ステータと対向するように配置されたロータを有するリムを含むプロペラと、を備える構成において、ステータとロータとにより構成されるモータの出力を向上させることができる。
【0010】
上記第1の局面による船舶推進機において、好ましくは、検出部は、ロータの軸方向においてステータと隣り合うように、かつ、ロータに対向するように配置されている。このように構成すれば、ステータと対向するようにロータが配置されている場合でも、検出部を、ロータに対向するように配置することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
1か月前
個人
シーアンカー
4か月前
個人
発電船
3か月前
個人
船舶用プロペラ
11か月前
個人
流体抵抗低減省エネ船
9か月前
小柳建設株式会社
台船
4か月前
個人
簡易型ライフジャケット
11か月前
ウラカミ合同会社
曳航ロボット
5か月前
炎重工株式会社
浮標
14日前
炎重工株式会社
浮標
14日前
炎重工株式会社
移動体
3か月前
個人
水陸両用移動装置
5か月前
個人
船舶
14日前
ダイハツ工業株式会社
ジャケット
6か月前
個人
海洋「いかだ」上の風力発電システム
10か月前
誠加興業股分有限公司
呼吸用マスク
5か月前
常石造船株式会社
メタノール燃料船
1か月前
個人
浮体式足場のブイ組立体
12か月前
株式会社テラサン
位置保持システム
3か月前
トヨタ自動車株式会社
ガンネル治具
8か月前
ヤマハ発動機株式会社
船外機
14日前
個人
キャタピラ推進式高速船
8か月前
株式会社神戸タフ興産
船舶の甲板構造
1か月前
藤倉コンポジット株式会社
架台
1か月前
川崎汽船株式会社
ドライアイス輸送船
7か月前
炎重工株式会社
自律航行浮遊体
14日前
株式会社 ASC
航海用低燃費航行方法
11か月前
個人
搬送器材
10か月前
株式会社大林組
水中潜行システム
6日前
株式会社小野田産業
シェルタ
7か月前
高階救命器具株式会社
救命具
7か月前
ASTI株式会社
操作機構取付構造
2か月前
サームトロン株式会社
外付けスラスタ装置
10か月前
ヤマハ発動機株式会社
船舶推進機および船舶
5か月前
ヤマト発動機株式会社
レース艇
2か月前
株式会社新来島どっく
船舶の居住区支持構造
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ