TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024102524
公報種別
公開特許公報(A)
公開日
2024-07-31
出願番号
2023006464
出願日
2023-01-19
発明の名称
区画線認識装置
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20240724BHJP(信号)
要約
【課題】路面の区画線を精度よく認識すること。
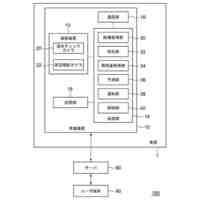
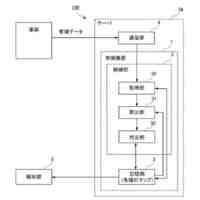
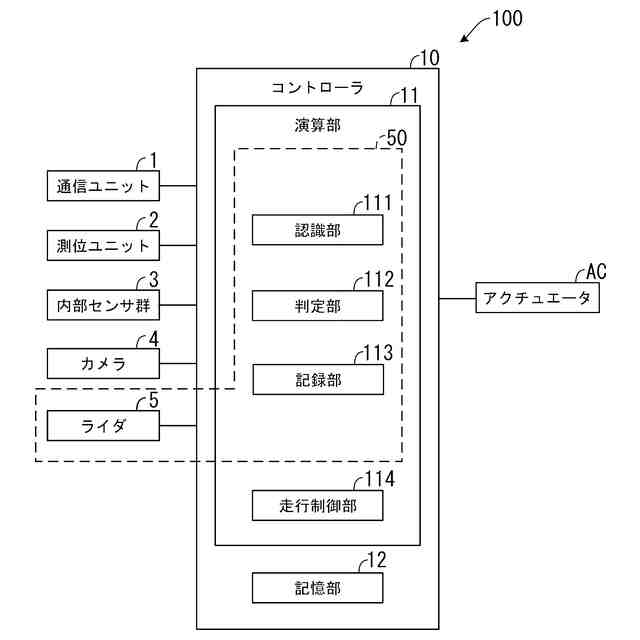
【解決手段】区画線認識装置50の車載検出器5は、走行する道路上の異なる位置からそれぞれ、1フレームの検出データとしてマトリクス状の複数の検出点毎の距離情報を含む3次元点群データを取得する。路面情報取得部11は、検出データに基づいて、フレーム毎の道路上の進行方向の区画線を路面情報として認識する認識部111と、道路上の同じ位置の区画線が連続する所定数のフレームで重複して認識されると、重複して認識された区画線を示すデータを有効と判定する判定部112と、を含む。
【選択図】図2
特許請求の範囲
【請求項1】
自車両の周囲に電磁波を照射して周囲の外界状況を時系列に検出する車載検出器と、前記車載検出器による複数フレームの検出データに基づいて、前記自車両が走行する道路の路面情報を取得する路面情報取得部と、を備える区画線認識装置であって、
前記車載検出器は、走行する前記道路上の異なる位置からそれぞれ、1フレームの検出データとしてマトリクス状の複数の検出点毎の距離情報を含む3次元点群データを取得し、
前記路面情報取得部は、
前記検出データに基づいて、フレーム毎の前記道路上の進行方向の区画線を前記路面情報として認識する認識部と、
前記道路上の同じ位置の区画線が連続する所定数のフレームで重複して認識されると、前記重複して認識された区画線を示すデータを有効と判定する判定部と、
を含むことを特徴とする区画線認識装置。
続きを表示(約 540 文字)
【請求項2】
請求項1に記載の区画線認識装置において、
前記車載検出器は、連続する第1所定数のフレームにそれぞれ前記道路上の同じ位置を含むように前記外界状況を検出し、
前記判定部は、前記第1所定数のフレームのうちの前記第1所定数よりも小さい第2所定数以上のフレームで前記道路上の同じ位置の区画線が重複して認識された場合に、前記重複して認識された区画線を示すデータを有効と判定することを特徴とする区画線認識装置。
【請求項3】
請求項2に記載の区画線認識装置において、
前記認識部は、各フレームにおいて前記自車両から所定距離以上離れた前記道路上の進行方向の区画線を認識することを特徴とする区画線認識装置。
【請求項4】
請求項1に記載の区画線認識装置において、
前記路面情報取得部はさらに、
前記判定部で有効と判定された前記道路上の同じ位置の区画線を示すデータを区画線情報として記憶部に記録する記録部を含むことを特徴とする区画線認識装置。
【請求項5】
請求項1から4のいずれか一項に記載の区画線認識装置において、
前記車載検出器は、ライダであることを特徴とする区画線認識装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両が走行する道路の区画線を認識する区画線認識装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
この種の装置として、ライダから出力されたスキャンデータのうち、通常の道路上と比較して反射率が高い白線上で得られた反射強度の高いデータを抽出する技術が知られている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-16685号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ライダから離れた遠方の路面では反射角度が浅くなるため、遠方の路面からのデータが得られにくくなる。また、白線部分の面積は小さいため、遠方の路面の白線のデータは1点または2点程度と少なく、ノイズとの識別が困難であった。
【課題を解決するための手段】
【0005】
本発明の一態様である区画線認識装置は、自車両の周囲に電磁波を照射して周囲の外界状況を時系列に検出する車載検出器と、車載検出器による複数フレームの検出データに基づいて、自車両が走行する道路の路面情報を取得する路面情報取得部と、を備える。車載検出器は、走行する道路上の異なる位置からそれぞれ、1フレームの検出データとしてマトリクス状の複数の検出点毎の距離情報を含む3次元点群データを取得し、路面情報取得部は、検出データに基づいて、フレーム毎の道路上の進行方向の区画線を路面情報として認識する認識部と、道路上の同じ位置の区画線が連続する所定数のフレームで重複して認識されると、重複して認識された区画線を示すデータを有効と判定する判定部と、を含む。
【発明の効果】
【0006】
本発明によれば、路面の区画線を精度よく認識することが可能になる。
【図面の簡単な説明】
【0007】
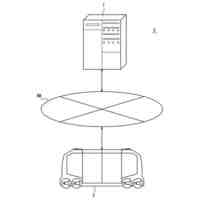
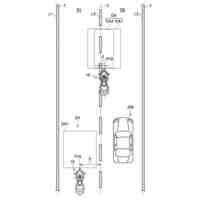
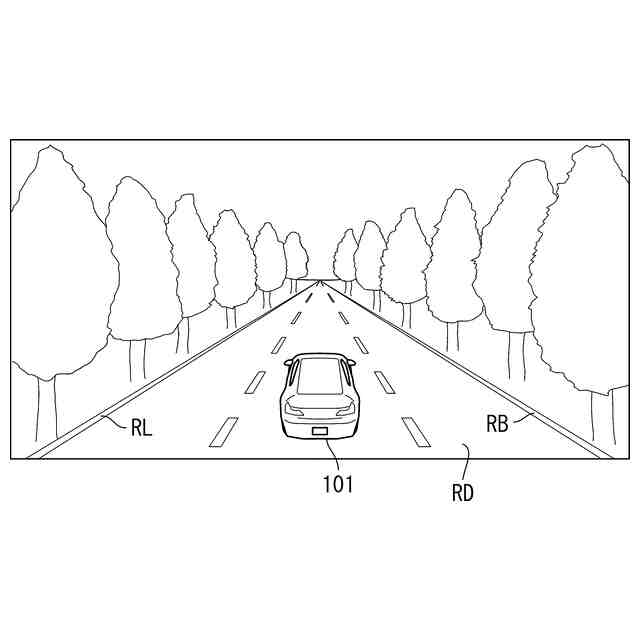
車両が道路を走行する様子を示す図。
ライダによる検出データの一例を示す模式図。
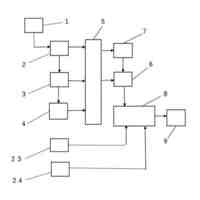
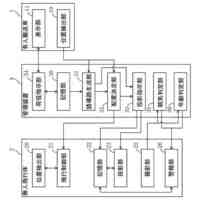
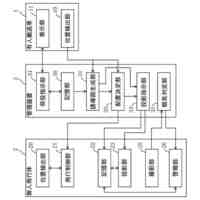
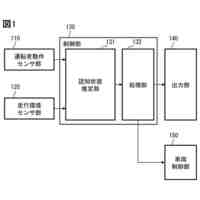
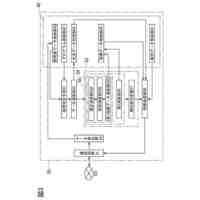
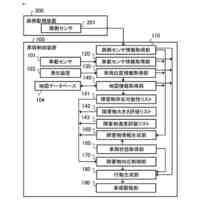
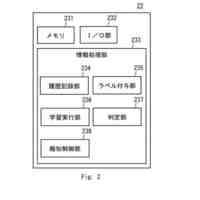
車両制御装置の要部構成を概略的に示すブロック図。
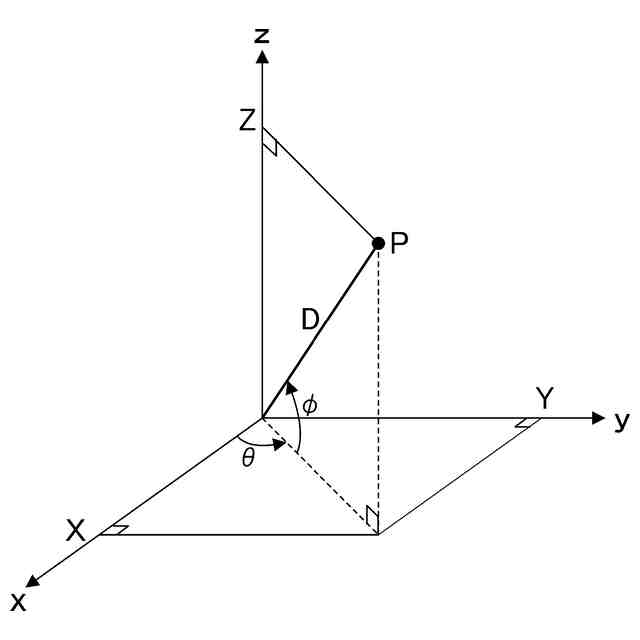
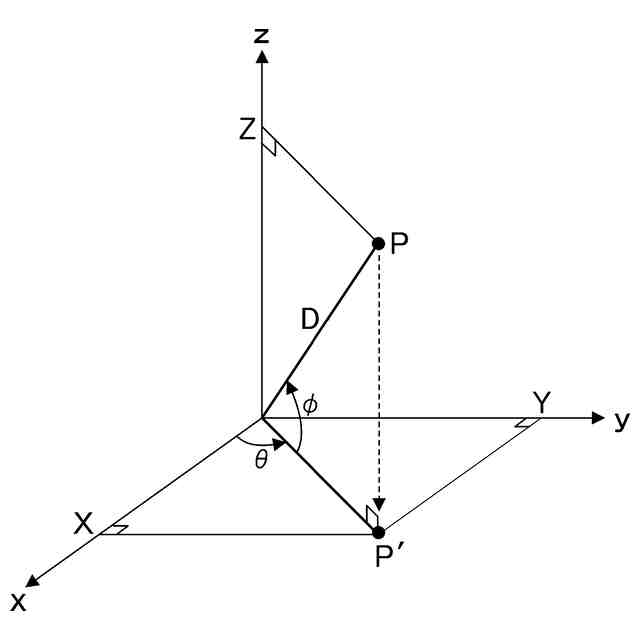
3次元座標系を用いて3次元空間の点群データの位置を表す図。
3次元空間から2次元のX-Y空間への点群データの写像を説明する図。
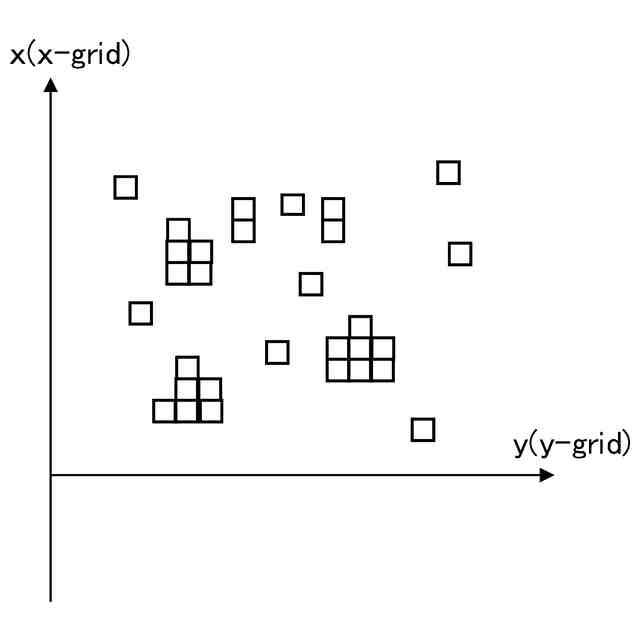
点群データを含むグリッドを示す模式図。
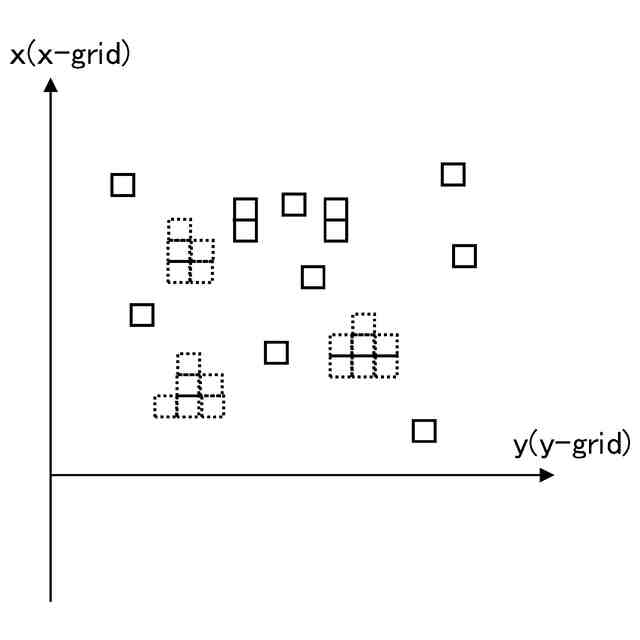
立体物に対応するグリッドを除去した後のグリッドを示す模式図。
時系列に得られた図4Bに対応するグリッドを示す模式図。
時系列に得られた図4Bに対応するグリッドを示す模式図。
時系列に得られた図4Bに対応するグリッドを示す模式図。
時系列に得られた図4Bに対応するグリッドを示す模式図。
時系列に得られた図4Bに対応するグリッドを示す模式図。
オフセット処理したグリッドを示す模式図。
オフセット処理したグリッドを示す模式図。
オフセット処理したグリッドを示す模式図。
オフセット処理したグリッドを示す模式図。
オフセット処理したグリッドを示す模式図。
ノイズカット処理を説明する模式図。
ノイズカット処理を説明する模式図。
ノイズカット処理を説明する模式図。
ノイズカット処理を説明する模式図。
ノイズカット処理を説明する模式図。
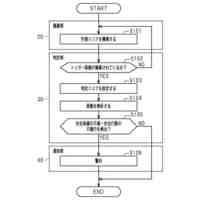
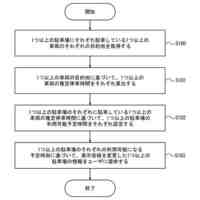
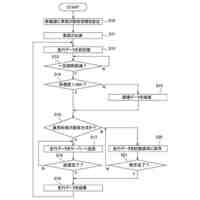
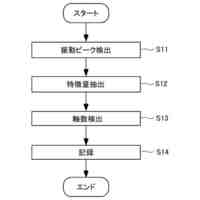
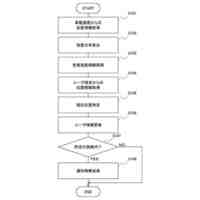
図2のコントローラの演算部で実行される処理の一例を示すフローチャート。
【発明を実施するための形態】
【0008】
以下に、図面を参照して発明の実施の形態について説明する。
発明の実施の形態に係る区画線認識装置は、自動運転機能を有する車両、すなわち自動運転車両に適用することができる。なお、本実施の形態に係る区画線認識装置が適用される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
【0009】
自動運転車両は、自動運転モードでの走行(以下、自動走行または自律走行と呼ぶ)時に、ライダ(LiDAR:Light Detection and Ranging)やカメラ等の車載検出器の検出データに基づき自車両の周囲の外界状況を認識する。自動運転車両は、その認識結果に基づいて、現時点から所定時間より先の走行軌道(目標軌道)を生成し、目標軌道に沿って自車両が走行するように走行用アクチュエータを制御する。
【0010】
図1Aは、自動運転車両である自車両101が道路RDを走行する様子を示す図である。図1Bは、自車両101に搭載され、自車両101の進行方向に向けられたライダにより得られた検出データの一例を示す模式図である。ライダによる計測点(検出点と呼んでもよい)は、照射したレーザが物体の表面のある1点で反射して戻ってくる点情報である。点情報は、レーザ源からその点までの距離と、反射して戻ってきたレーザの強度と、レーザ源とその点との相対速度とを含む。また、図1Bに示すような複数の検出点で構成されるデータを、点群データと呼ぶ。図1Bには、図1Aの物体のうち、ライダの視野(Field of view;以下FOVと呼ぶ)に含まれる物体の表面の検出点に基づく点群データが示されている。FOVは、例えば、自車両101の水平方向(道路幅方向と呼んでもよい)に120 deg、鉛直方向(上下方向と呼んでもよい)に40 degとしてもよい。FOVの値は、自車両101の仕様に基づいて適宜変更して構わない。自車両101は、図1Bに示すような点群データに基づいて車両周囲の外界状況、より具体的には車両周囲の道路構造および物体等を認識し、その認識結果に基づいて目標軌道を生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
18日前
個人
自動車ケアフル灯
15日前
個人
出会い頭事故防止装置
1か月前
能美防災株式会社
発信機
18日前
ホーチキ株式会社
監視システム
24日前
タック株式会社
安全監視システム
22日前
株式会社JVCケンウッド
通知システム
22日前
株式会社アジラ
注目行動呼びかけシステム
17日前
日本信号株式会社
路側装置及びセンサ装置
25日前
三菱ロジスネクスト株式会社
搬送システム
18日前
三菱ロジスネクスト株式会社
搬送システム
18日前
三菱ロジスネクスト株式会社
搬送システム
18日前
三菱ロジスネクスト株式会社
搬送システム
18日前
株式会社デンソー
運転支援装置
1か月前
トヨタ自動車株式会社
方法
29日前
東亜電子工業株式会社
警報コントローラ
10日前
能美防災株式会社
非常報知システム
2日前
トヨタ自動車株式会社
車両
17日前
矢崎総業株式会社
路面監視装置
16日前
愛知時計電機株式会社
生活データ集計装置
16日前
パナソニックIPマネジメント株式会社
火災警報器
16日前
エムケー精工株式会社
信号機および信号機の発光制御方法
1か月前
個人
除排雪判断支援システムおよびプログラム、道路管理方法
22日前
トヨタ自動車株式会社
情報処理装置
24日前
三菱電機株式会社
車両制御装置
1か月前
日本電気株式会社
監視装置、監視方法、及びプログラム
12日前
トヨタ自動車株式会社
情報処理装置
24日前
株式会社JVCケンウッド
情報処理装置及び情報処理方法
22日前
トヨタ自動車株式会社
配車システム
10日前
トヨタ自動車株式会社
情報処理装置
25日前
オンキヨー株式会社
車軸数検出システム、及び、車軸数検出方法
9日前
能美防災株式会社
火災受信機
29日前
本田技研工業株式会社
車両
16日前
トヨタ自動車株式会社
情報処理装置
22日前
株式会社JVCケンウッド
吸着デバイス及び吸着システム
2日前
いすゞ自動車株式会社
システム
22日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ