TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024091704
公報種別
公開特許公報(A)
公開日
2024-07-05
出願番号
2024062715,2021190996
出願日
2024-04-09,2021-11-25
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
B62D
6/00 20060101AFI20240628BHJP(鉄道以外の路面車両)
要約
【課題】車体の操舵にともなうユーザーの負担の軽減が必ずしも十分に実現されていない。
【解決手段】 車体を自動走行させる制御を行う制御装置と、車体の車体位置情報を取得する車体位置情報取得装置と、を備え、制御装置は、車体を走行させるとき、ステアリング角度が目標ステアリング角度と一致するように制御し、ステアリングの手動操作が行われた場合において、自動走行はキャンセルされ、目標ステアリング角速度と実際のステアリング角速度との間の差であるステアリング角速度差が所定レベルを超える状態において、手動操作が行われたと判断されることを特徴とする。
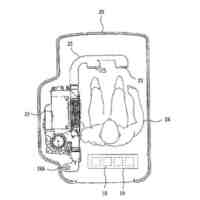
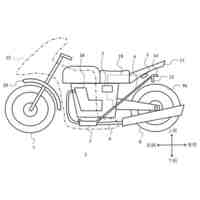
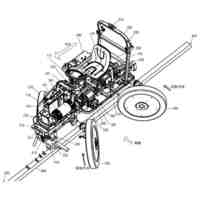
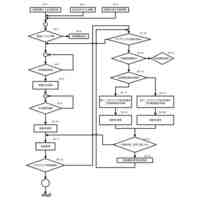
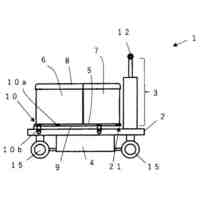
【選択図】図2
特許請求の範囲
【請求項1】
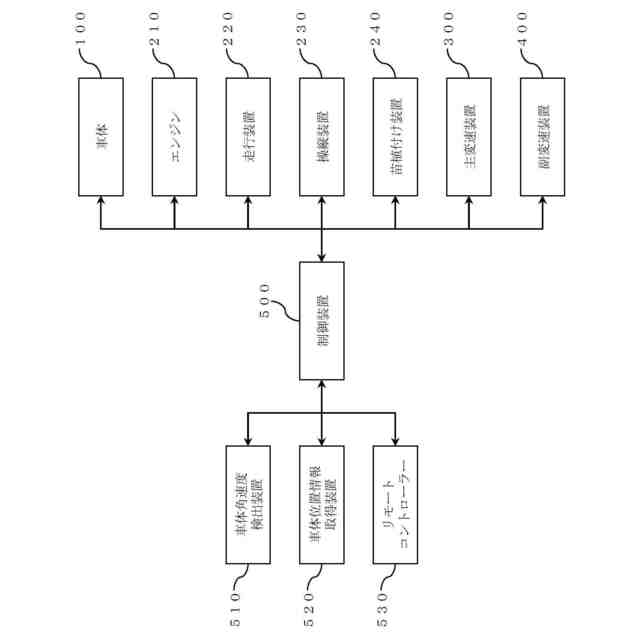
車体(100)を自動走行させる制御を行う制御装置(500)と、
前記車体(100)の車体位置情報を取得する車体位置情報取得装置(520)と、
を備え、
前記制御装置(500)は、前記車体(100)を走行させるとき、前記ステアリング角度が目標ステアリング角度と一致するように制御し、
ステアリングの手動操作が行われた場合において、前記自動走行はキャンセルされ、
目標ステアリング角速度と実際のステアリング角速度との間の差であるステアリング角速度差が所定レベルを超える状態において、前記手動操作が行われたと判断されることを特徴とする作業車両。
続きを表示(約 660 文字)
【請求項2】
前記目標ステアリング角速度は、目標ステアリング角度と実際のステアリング角度の差であるステアリング角度差から決定しており、
前記目標ステアリング角度にステアリング角度が近づいたときに、目標ステアリング角速度を減速させることを特徴とする請求項1に記載の作業車両。
【請求項3】
前記ステアリング角速度差が前記所定レベルを超える状態が所定時間にわたって継続した場合において、前記手動操作が行われたと判断されることを特徴とする請求項1または2に記載の作業車両。
【請求項4】
車体(100)の向きの変化に関する車体角速度を検出する車体角速度検出装置(510)と、
前記制御装置(500)は、前記車体(100)を走行させるとき、前記車体角速度検出装置(510)により前記検出された車体角速度に基づいてステアリング角度を制御し、
前記車体角速度検出装置(510)は、前記車体位置情報取得装置(520)により前記取得された車体位置情報に基づいて前記車体角速度を検出し、
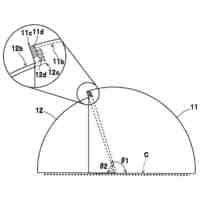
前記車体角速度が、減少することにより、旋回半径(r)が減少する内回り旋回が発生するとき、前記目標ステアリング角度は小さくなるように調節し、
前記内回り旋回が発生するとき、前記目標ステアリング角度が小さくなるように調節される代わりに、ステアリング切戻しタイミングが遅くなるように前記ステアリング角度は制御されることを特徴とする請求項1から3の何れか1項に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、田植え機などのような作業車両に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車体へ昇降可能に取付けられた苗植付け装置と、ステアリングハンドルを駆動するステアリングモーターと、ステアリングモーターにステアリングハンドルを駆動させることにより、車体の直進制御を行う制御装置と、を有する、田植え機などのような作業車両が、知られている(たとえば、特許文献1および2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2016-24541号公報
特開2002-335720号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、本発明者は、さまざまな観点からユーザーの負担を軽減することが重要であると考えている。
【0005】
しかしながら、上述された従来の田植え機などのような作業車両については、車体の操舵にともなうユーザーの負担の軽減が必ずしも十分に実現されていない。
【0006】
本発明は、上述された従来の課題を考慮し、車体の操舵にともなうユーザーの負担を軽減することができる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
第1の本発明は、車体(100)を自動走行させる制御を行う制御装置(500)と、
前記車体(100)の車体位置情報を取得する車体位置情報取得装置(520)と、
を備え、
前記制御装置(500)は、前記車体(100)を走行させるとき、前記ステアリング角度が目標ステアリング角度と一致するように制御し、
ステアリングの手動操作が行われた場合において、前記自動走行はキャンセルされ、
目標ステアリング角速度と実際のステアリング角速度との間の差であるステアリング角速度差が所定レベルを超える状態において、前記手動操作が行われたと判断されることを特徴とする作業車両である。
【0008】
第2の本発明は、前記目標ステアリング角速度は、目標ステアリング角度と実際のステアリング角度の差であるステアリング角度差から決定しており、
前記目標ステアリング角度にステアリング角度が近づいたときに、目標ステアリング角速度を減速させることを特徴とする第1の本発明の作業車両である。
【0009】
第3の本発明は、前記ステアリング角速度差が前記所定レベルを超える状態が所定時間にわたって継続した場合において、前記手動操作が行われたと判断されることを特徴とする第1または第2の本発明の作業車両である。
【0010】
第4の本発明は、車体(100)の向きの変化に関する車体角速度を検出する車体角速度検出装置(510)と、
前記制御装置(500)は、前記車体(100)を走行させるとき、前記車体角速度検出装置(510)により前記検出された車体角速度に基づいてステアリング角度を制御し、
前記車体角速度検出装置(510)は、前記車体位置情報取得装置(520)により前記取得された車体位置情報に基づいて前記車体角速度を検出し、
前記車体角速度が、減少することにより、旋回半径(r)が減少する内回り旋回が発生するとき、前記目標ステアリング角度は小さくなるように調節し、
前記内回り旋回が発生するとき、前記目標ステアリング角度が小さくなるように調節される代わりに、ステアリング切戻しタイミングが遅くなるように前記ステアリング角度は制御されることを特徴とする第1から第3の何れか1項の本発明の作業車両である。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
移植機
4日前
井関農機株式会社
作業車両
4日前
井関農機株式会社
コンバイン
4日前
井関農機株式会社
籾摺選別装置
4日前
井関農機株式会社
歩行型電動管理機
4日前
井関農機株式会社
汎用コンバインの脱穀装置
4日前
井関農機株式会社
汎用コンバインの脱穀装置
4日前
井関農機株式会社
作業車両
3日前
個人
自転車の傘
5か月前
個人
サドル揺動装置
7か月前
個人
重量物移動台車
2か月前
個人
自動二輪車
9か月前
個人
二輪バイク補助輪
8か月前
個人
多目的運搬トレー
11か月前
個人
車両用横転防止装置
3か月前
個人
カウル取り付け器具
9か月前
個人
物品収納構造
11か月前
井関農機株式会社
作業機
5か月前
個人
自転車
8か月前
井関農機株式会社
作業機
3か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
5か月前
井関農機株式会社
作業車両
9か月前
三甲株式会社
保護具
3か月前
個人
クリアレインシェード
3か月前
株式会社北誠商事
被覆構造体
5か月前
株式会社クラベ
面状ユニット
1か月前
個人
電動カート
9か月前
個人
自転車の駐輪装置
8か月前
個人
車両底面への噴流発生器
10か月前
個人
固定具及び自転車
11か月前
株式会社ホシプラ
台車
2か月前
個人
スライドレインプルーフ
1か月前
帝人株式会社
車両構造体
1か月前
三甲株式会社
台車
3か月前
個人
自動二輪車に装着する被服
10か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ