TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024089460
公報種別
公開特許公報(A)
公開日
2024-07-03
出願番号
2022204840
出願日
2022-12-21
発明の名称
旋回作業機
出願人
株式会社クボタ
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
E02F
9/26 20060101AFI20240626BHJP(水工;基礎;土砂の移送)
要約
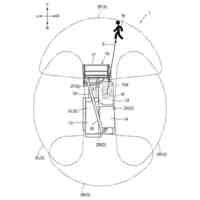
【課題】旋回部の運動にて外乱加速度が生じても、旋回部の姿勢角を精度よく検出する。
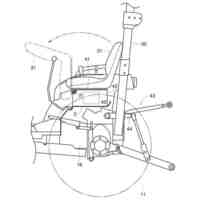
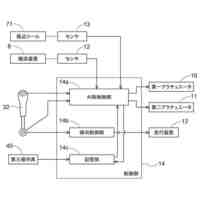
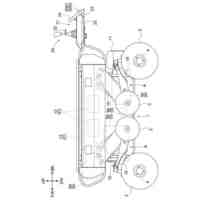
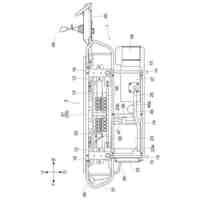
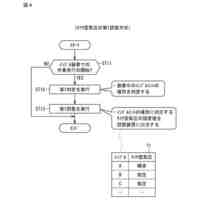
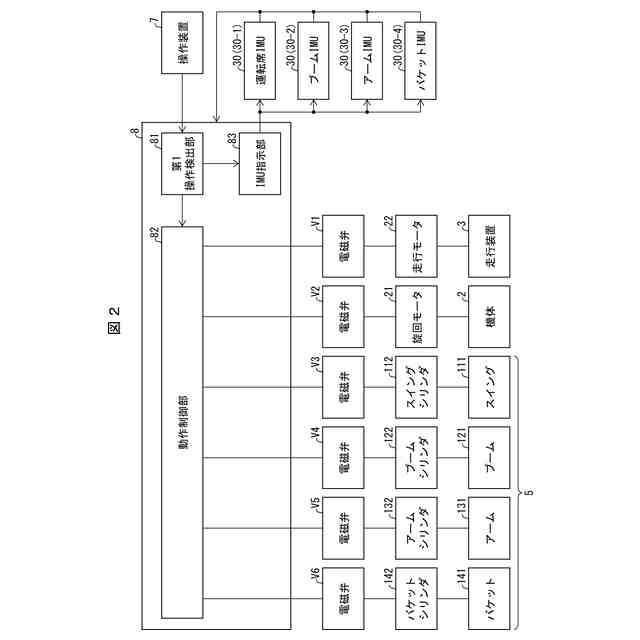
【解決手段】旋回作業機(1)は、旋回部(2)と、旋回部(2)に配置され、角速度および加速度に基づいて姿勢角を算出する慣性センサ(30)と、旋回部(2)を運動させる操作を検出する検出部としての第1操作検出部(81)と、運動させる操作が検出された場合に、操作に応じた信号を前記慣性センサ(30)に出力する出力部としてのIMU指示部(83)と、を備える。
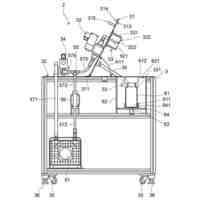
【選択図】図2
特許請求の範囲
【請求項1】
旋回部と、
前記旋回部に配置され、角速度および加速度に基づいて姿勢角を算出する慣性センサと、
前記旋回部を運動させる操作を検出する検出部と、
前記運動させる操作が検出された場合に、前記操作に応じた信号を前記慣性センサに出力する出力部と、を備える、旋回作業機。
続きを表示(約 910 文字)
【請求項2】
前記操作に応じた信号は、姿勢角の算出に使用する角速度成分の割合を、前記操作が検出されていない場合に用いる所定の割合よりも多くするように指示する信号である請求項1に記載の旋回作業機。
【請求項3】
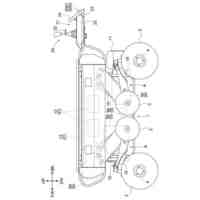
走行装置を備え、
前記旋回部は前記走行装置上に旋回可能に設置され、
前記検出部は、前記走行装置を走行させる操作についても、前記旋回部を運動させる操作として検出する、請求項1又は2に記載の旋回作業機。
【請求項4】
前記旋回部を運動させる操作を受け付ける操作装置を備え、
前記検出部は、前記操作装置に対する操作に基づいて、前記旋回部を運動させる操作を検出する、請求項1又は2に記載の旋回作業機。
【請求項5】
前記操作に応じた信号は、姿勢角の算出に使用する角速度成分の割合を、前記操作が検出されていない場合に用いる所定の割合よりも多くし、かつ、前記角速度成分を多くする割合を、前記操作装置の操作量に応じて連続的又は段階的に増やすように指示する信号である請求項4に記載の旋回作業機。
【請求項6】
前記旋回部は、油圧アクチュエータの駆動にて運動し、
前記検出部は、前記油圧アクチュエータに供給する油圧を制御する信号より、前記旋回部を運動させる操作を検出する、請求項1又は2に記載の旋回作業機。
【請求項7】
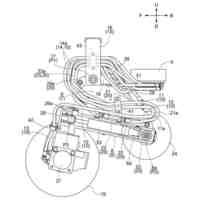
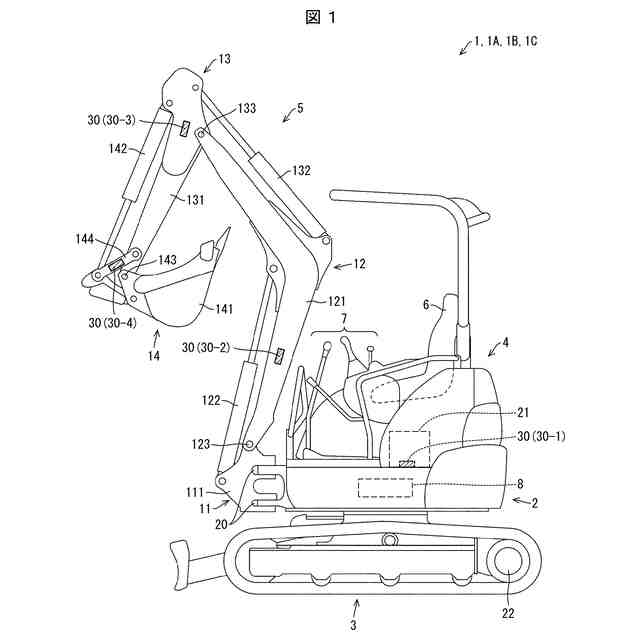
前記旋回部は、旋回する機体と、前記機体に取り付けられ、複数の可動部を有する作業装置と、を備え、
前記機体および前記作業装置の複数の可動部のそれぞれに前記慣性センサが配置され、
前記出力部は、
前記機体を運動させる操作を検出した場合、前記機体および前記複数の可動部に配置された前記各慣性センサに、前記操作に応じた信号を出力し、
前記複数の可動部の何れかの可動部を運動させる操作を検出した場合、運動させる可動部および該可動部よりも前記作業装置の先端側に位置する可動部に配置された前記各慣性センサに、前記操作に応じた信号を出力する、請求項1又は2に記載の旋回作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、バックホー等の旋回部を備えた旋回作業機に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
従来、特許文献1に開示された、機体の傾斜角度を検出する傾斜角度検出手段を備えた作業機が知られている。傾斜角度検出手段は、重力加速度に対する出力が機体の傾斜角度に応じて変化するように機体に装備された加速度センサと、加速度センサの出力を機体の傾斜角度に換算する換算手段を備えている。
【0003】
また、従来、車両系の姿勢検出手段として慣性センサ(IMU:Inertial Measurement Unit)が広く使用されている。慣性センサは、加速度センサおよび角速度センサを備え、機体の角速度および加速度を計測し、自機の姿勢角、方位角等を算出する。
【先行技術文献】
【特許文献】
【0004】
特許第5297280号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
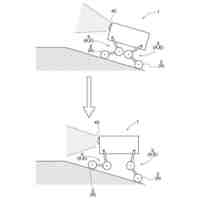
しかしながら、一般的な車両と異なり、旋回作業機では旋回部が旋回運動する。そのため、旋回部の運動による加速度が発生し、該加速度が外乱加速度となって、姿勢角の算出に用いる加速度に影響を及ぼす。その結果、慣性センサで算出される姿勢角に誤差が発生する。
【0006】
本発明の一態様は、旋回部の運動にて外乱加速度が生じても、旋回部の姿勢角を精度よく検出することが可能な旋回作業機を実現することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明の一態様に係る旋回作業機は、旋回部と、前記旋回部に配置され、角速度および加速度に基づいて姿勢角を算出する慣性センサと、前記旋回部を運動させる操作を検出する検出部と、前記運動させる操作が検出された場合に、前記操作に応じた信号を前記慣性センサに出力する出力部と、を備える。
【0008】
上記構成によれば、慣性センサに、慣性センサが配置された旋回部が運動する、つまり慣性部が動くことを通知することができる。これにより、慣性センサに、旋回の運動の状態に応じて適切に姿勢角の算出を行わせることができる。
【0009】
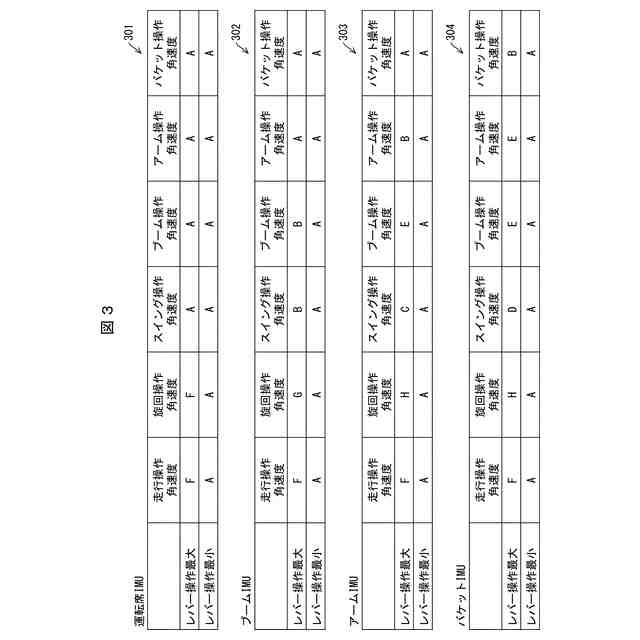
本発明の一態様に係る旋回作業機において、前記操作に応じた信号は、姿勢角の算出に使用する角速度成分の割合を、前記操作が検出されていない場合に用いる所定の割合よりも多くするように指示する信号であってもよい。
【0010】
上記構成によれば、旋回部が運動する場合、運動による誤差が小さい角速度成分を主として使用することで、慣性センサに、精度良く姿勢角の算出を行わせることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
17日前
株式会社クボタ
収穫機
4日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
12日前
株式会社クボタ
作業車
27日前
株式会社クボタ
収穫機
1か月前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
3日前
株式会社クボタ
収穫機
19日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
17日前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
27日前
株式会社クボタ
作業車
3日前
株式会社クボタ
作業車
17日前
株式会社クボタ
収穫機
17日前
株式会社クボタ
作業車両
3日前
株式会社クボタ
システム
10日前
株式会社クボタ
採水装置
3日前
株式会社クボタ
エンジン
1か月前
株式会社クボタ
豆類選別機
5日前
株式会社クボタ
作物選別機
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ