TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024082940
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2022197169
出願日
2022-12-09
発明の名称
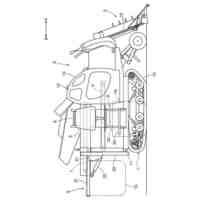
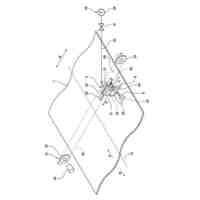
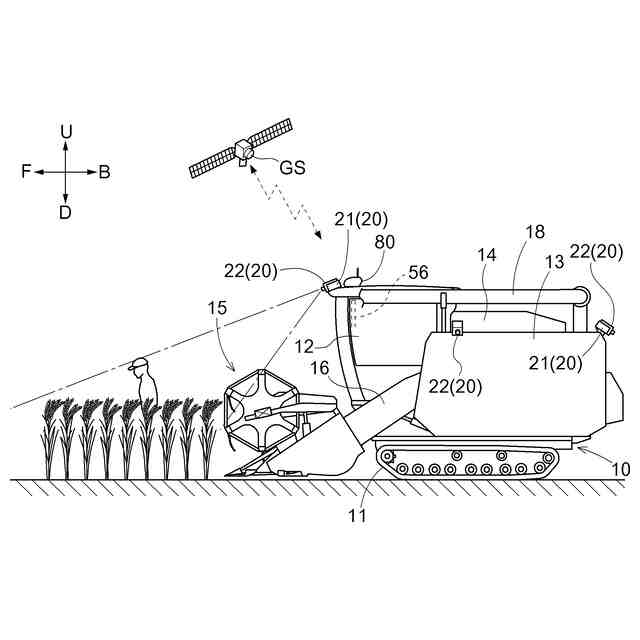
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20240613BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】遠隔操作にともなって作業車に生じる予期しない問題に関する情報が、遠隔操縦者などの監視者のために表示できる作業車を提供する。
【解決手段】
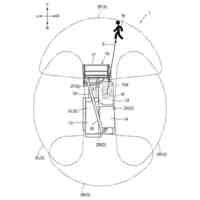
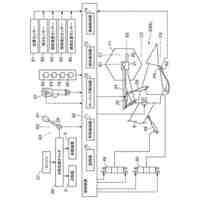
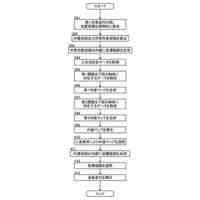
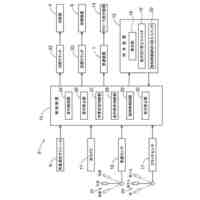
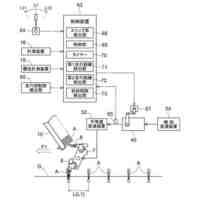
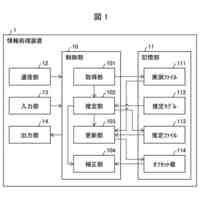
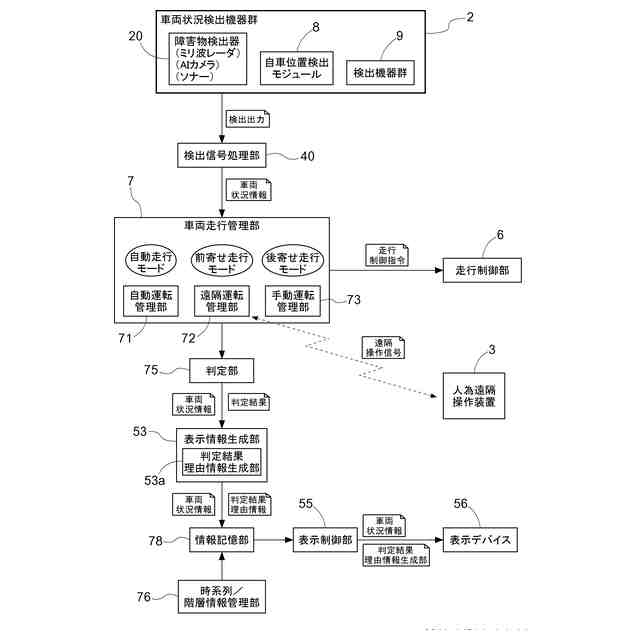
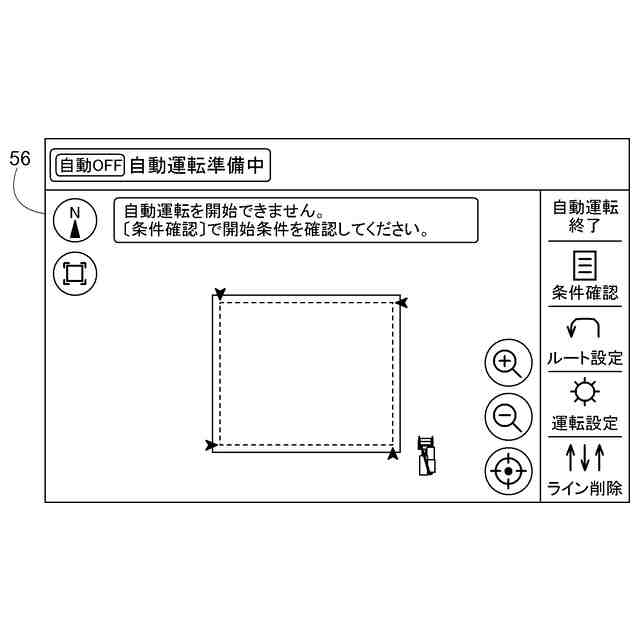
作業車は、人為遠隔操作装置3からの操作信号に基づいて走行制御指令を生成する車両走行管理部7と、走行制御指令による走行実行可能性を判定する判定部75と、判定部75による判定結果に基づいて走行制御指令による走行を実行する走行制御部6と、判定部75による判定結果が走行実行不可の場合、判定結果理由情報を生成する判定結果理由情報生成部53aと、判定結果理由情報を表示する表示デバイス56とを備える。
【選択図】図6
特許請求の範囲
【請求項1】
人為遠隔操作装置によって遠隔走行が可能な作業車であって、
前記人為遠隔操作装置からの操作信号に基づいて走行制御指令を生成する車両走行管理部と、
前記走行制御指令による走行実行可能性を判定する判定部と、
前記判定部による判定結果に基づいて前記走行制御指令による走行を実行する走行制御部と、
前記判定部による前記判定結果が走行実行不可の場合、判定結果理由情報を生成する判定結果理由情報生成部と、
前記判定結果理由情報を表示する表示デバイスと、
を備える作業車。
続きを表示(約 870 文字)
【請求項2】
人為操作に応じて、前記判定結果理由情報が前記表示デバイスに表示される請求項1に記載の作業車。
【請求項3】
自動で、前記判定結果理由情報が前記表示デバイスに表示される請求項1に記載の作業車。
【請求項4】
車両状況を検出する車両状況検出機器群が備えられ、前記判定部は、前記車両状況検出機器群からの検出信号に基づいて前記走行実行可能性を判定する請求項1に記載の作業車。
【請求項5】
前記判定結果理由情報は、前記車両状況検出機器群のうちで前記判定結果が走行実行不能となる要因となった車両状況検出機器を特定する情報と当該車両状況検出機器の検出結果とを含む請求項4に記載の作業車。
【請求項6】
前記車両走行管理部は、自動走行モードと前寄せ走行モードと後寄せ走行モードとを備え、走行モード毎に異なった前記検出信号が前記走行実行可能性を判定するために用いられる請求項4に記載の作業車。
【請求項7】
前記自動走行モードにおいて、前記判定部によって走行実行可能が判定されるためには、前記車両状況検出機器群のうちの自動走行に関する全ての検出結果がポジティブであることが要求される請求項6に記載の作業車。
【請求項8】
前記前寄せ走行モードにおいて、前記判定部によって走行実行可能が判定されるためには、前記車両状況検出機器群のうち前進走行に関連する検出機器の検出結果がポジティブであることが要求される請求項6に記載の作業車。
【請求項9】
前記後寄せ走行モードにおいて、前記判定部によって走行実行可能が判定されるためには、前記車両状況検出機器群のうち後進走行に関連する検出機器の検出結果がポジティブであることが要求される請求項6に記載の作業車。
【請求項10】
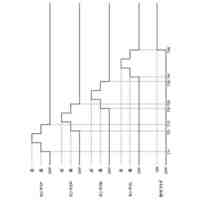
前記判定結果理由情報は、時系列表示で、または階層表示で、あるいはその両方の表示で前記表示デバイスに表示可能である請求項1に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、人為遠隔操作装置によって遠隔走行が可能な作業車に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、有人で自動走行が可能な作業車両が開示されている。この作業車両では、障害物検出部によりトラクタの周囲に障害物が検出された場合に、自動走行中断部は自動走行を中断し、報知部は、自動走行が中断されたことを周囲に報知する。これにより、トラクタの周囲に位置する人物も、トラクタが自動走行を停止した理由を知ることができる。
【0003】
特許文献2には、車両から離れた位置からの無線通信操作により自動走行が可能な作業車両が開示されている。この作業車両では、障害物検出部により作業車両の周囲に障害物が検出された場合に自動走行が中断され、作業車両が自動走行を停止した理由がブザーや警告灯を通じて、報知される。
【0004】
特許文献3には、リモコン走行と自動走行とが可能であり、自動走行が困難となる特殊領域では、作業者によるリモコンを用いた遠隔操作で作業走行が行われる田植機が開示されている。自動走行中の田植機が特殊領域に進入する直前には、機体が強制停止され、リモコンを用いた手動走行への移行が報知される。さらに、障害物検知、越境検知、傾斜検知、などが発生すると、田植機は急停車する。また、資材詰まり検知、スリップ検知、衛星信号受信異常、位置ずれ異常などが発生すると、田植機は徐々に停車する。
【先行技術文献】
【特許文献】
【0005】
特開2016-168883号公報(段落番号0037他)
特開2016-170523号公報(段落番号0035他)
特開2022-085684号公報(段落番号0206、0317他)
【発明の概要】
【発明が解決しようとする課題】
【0006】
リモコンを用いた作業車の遠隔操作において、所望通りに作業車が走行しない場合や、作業車が突然停車するような場合、遠隔操縦者などの監視者は、遠隔操作と作業車の予期しない動きとの関係を、把握する必要がある。しかしながら、上記特許文献では、そのような遠隔操作にともなう作業車の予期しない動きに関する情報を、遠隔操縦者や監視者のために表示する技術は開示されていない。
【0007】
上記実情に鑑み、本発明は、遠隔操作にともなって作業車に生じる予期しない問題に関する情報が、遠隔操縦者などの監視者のために表示できる作業車を提供することである。
【課題を解決するための手段】
【0008】
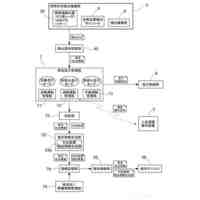
本発明による作業車は、人為遠隔操作装置によって遠隔走行が可能であり、前記人為遠隔操作装置からの操作信号に基づいて走行制御指令を生成する車両走行管理部と、前記走行制御指令による走行実行可能性を判定する判定部と、前記判定部による判定結果に基づいて前記走行制御指令による走行を実行する走行制御部と、前記判定部による前記判定結果が走行実行不可の場合、判定結果理由情報を生成する判定結果理由情報生成部と、前記判定結果理由情報を表示する表示デバイスとを備える。
【0009】
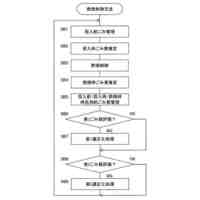
この構成では、人為遠隔操作装置からの操作信号に基づいて生成される走行制御指令によって車両が走行する遠隔走行において、当該走行制御指令による走行が実行可能であるかどうかが判定される。走行制御指令による走行が実行可能であれば、走行制御部によって当該走行が実行される。走行制御指令による走行が実行不可であれば、走行制御部によって当該走行が実行されないが、同時に、この走行不可の理由を示す判定結果理由情報が生成され、表示デバイスに表示される。人為遠隔操作装置を使用している遠隔走行操縦者や監視員は、表示された判定結果理由情報から、実行されなかった走行制御指令(遠隔操縦者による指令)の特定やその理由を把握することが可能となる。
【0010】
判定結果理由情報の表示タイミングに関して、本発明の1つの実施形態では、人為操作に応じて、前記判定結果理由情報が前記表示デバイスに表示される。この構成では、表示デバイスに判定結果理由情報が表示されるタイミングは、判定結果理由情報を見ようとする者によって任意に決定されるので、当該者は、所望に時点で判定結果理由情報を見ることができる。つまり、この構成では、人為操作があるまで、判定結果理由情報が保持され、人為操作があった時点で判定結果理由情報が表示されることになる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
3日前
株式会社クボタ
収穫機
8日前
株式会社クボタ
作業車
8日前
株式会社クボタ
収穫機
10日前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
8日前
株式会社クボタ
システム
1日前
株式会社クボタ
野菜収穫機
18日前
株式会社クボタ
圃場作業車
3日前
株式会社クボタ
葉菜類収穫機
10日前
株式会社クボタ
電解水生成装置
9日前
株式会社クボタ
電解水生成装置
9日前
株式会社クボタ
電解水生成装置
9日前
株式会社クボタ
電解水生成装置
9日前
株式会社クボタ
浮遊物観測装置
1日前
株式会社クボタ
システム及び作業車
2日前
株式会社クボタ
廃棄物の圧縮成形装置
2日前
株式会社クボタ
制御システム及び作業車
1日前
株式会社クボタ
車両制御システム及び作業車
8日前
株式会社クボタ
走行制御システム及び収穫機
8日前
株式会社クボタ
圧力保持ユニット及び反転装置
18日前
株式会社クボタ
作業車及び作業車を制御するシステム
1日前
株式会社クボタ
セグメント連結具及びセグメント連結方法
9日前
株式会社クボタ
作業車、及び、作業車の自動走行制御システム
2日前
株式会社クボタ
ごみピットの管理方法及びごみピットの管理装置
15日前
株式会社クボタケミックス
排水集合管における外層部材の止水性の検査方法
2日前
株式会社クボタ
作業機
今日
株式会社クボタ
固液分離装置および固液分離装置の無端ベルトの洗浄方法
11日前
株式会社クボタ
ごみ焼却炉の燃焼制御方法及びごみ焼却炉の燃焼制御装置
15日前
株式会社クボタ
トラクタ
今日
株式会社クボタ
作業車両
今日
株式会社クボタ
基準画像生成方法
7日前
株式会社クボタ
油圧クラッチとこの油圧クラッチを備えた作業車用走行動力伝達装置
1日前
株式会社クボタ
ハイブリッドシステム及びハイブリッドシステムを備えている作業機
18日前
株式会社クボタ
情報処理装置、脱水機、含水率推定方法、および含水率推定プログラム
8日前
株式会社クボタ
情報処理装置、脱水機、含水率推定方法、および含水率推定プログラム
8日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ