TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024084486
公報種別
公開特許公報(A)
公開日
2024-06-25
出願番号
2022198782
出願日
2022-12-13
発明の名称
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20240618BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車の作業効率や利便性の低下を抑制する。
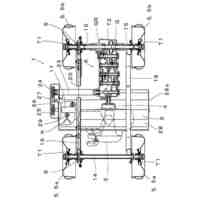
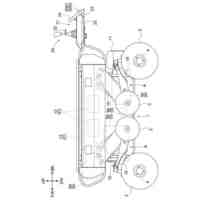
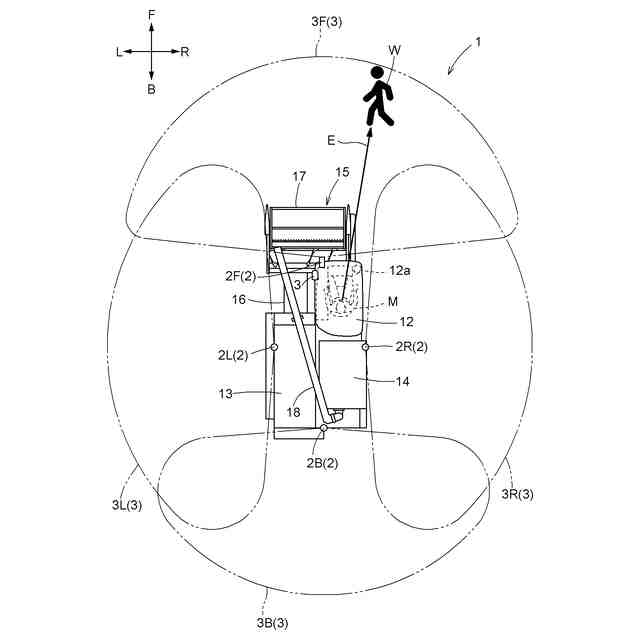
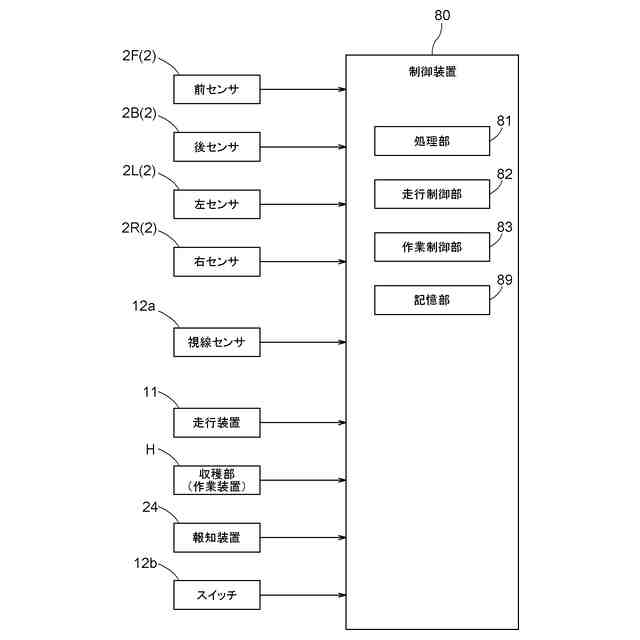
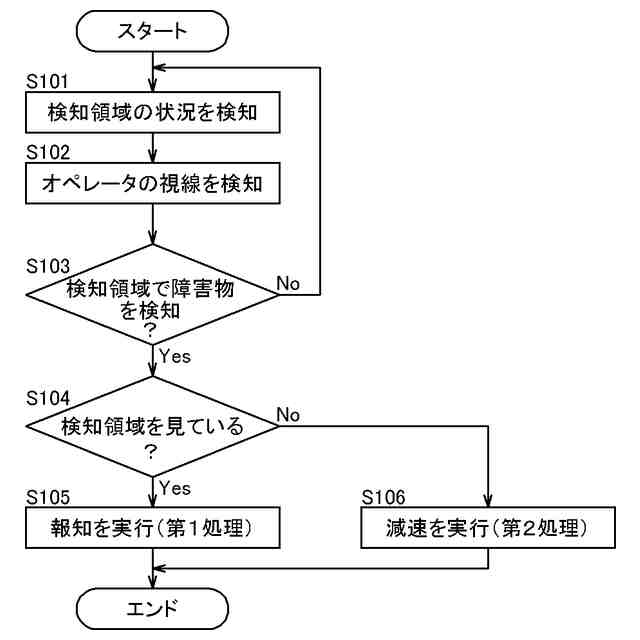
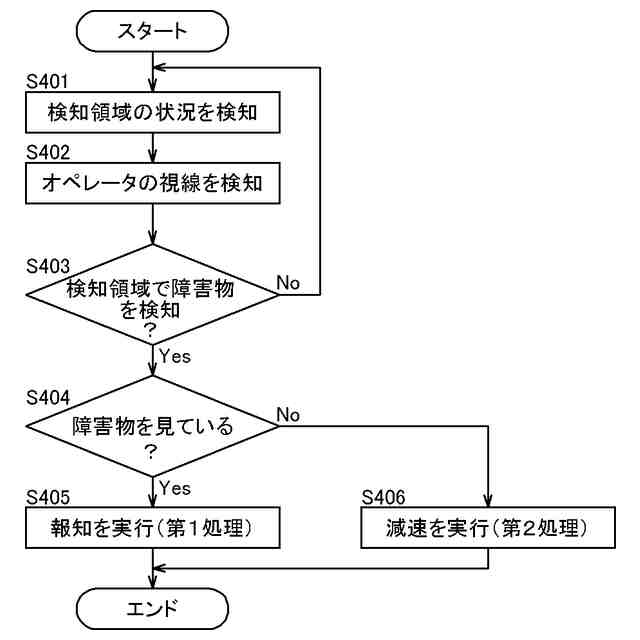
【解決手段】コンバイン1は、車外の検知領域Aの状況を検知する車外センサ2と、運転部12に搭乗したオペレータMの視線を検知する視線センサ12aと、車外センサ2の出力と視線センサ12aの出力とに基づいて処理を実行する処理部と、を備える。処理部は、オペレータMが検知領域Aを見ていると判断した場合に第1処理を実行し、オペレータが検知領域Aを見ていないと判断した場合に第1処理と異なる第2処理を実行する。
【選択図】図1
特許請求の範囲
【請求項1】
車外の検知領域の状況を検知する車外センサと、
運転部に搭乗したオペレータの視線を検知する視線センサと、
前記車外センサの出力と前記視線センサの出力とに基づいて処理を実行する処理部と、を備え、
前記処理部は、前記オペレータが前記検知領域を見ていると判断した場合に第1処理を実行し、前記オペレータが前記検知領域を見ていないと判断した場合に前記第1処理と異なる第2処理を実行する作業車。
続きを表示(約 900 文字)
【請求項2】
障害物を検知する車外センサと、
運転部に搭乗したオペレータの視線を検知する視線センサと、
前記車外センサの出力と前記視線センサの出力とに基づいて処理を実行する処理部と、を備え、
前記処理部は、前記オペレータが前記障害物を見ていると判断した場合に第1処理を実行し、前記オペレータが前記障害物を見ていないと判断した場合に前記第1処理と異なる第2処理を実行する作業車。
【請求項3】
前記視線センサは、前記運転部に設けられ前記オペレータの顔を撮影するカメラである請求項1または2に記載の作業車。
【請求項4】
複数の前記車外センサを備える請求項1または2に記載の作業車。
【請求項5】
前記車外センサが、カメラ、LiDAR、又はミリ波レーダーである請求項1または2に記載の作業車。
【請求項6】
前記第1処理が報知であり前記第2処理が減速である請求項1または2に記載の作業車。
【請求項7】
走行装置と、
前記視線センサの出力に基づいて前記走行装置を制御する走行制御部と、を備える請求項1または2に記載の作業車。
【請求項8】
人為操作を受け付けるスイッチを備え、
前記走行制御部は、前記スイッチがON状態の場合に前記視線センサの出力に基づく前記走行装置の制御を実行し、前記スイッチがOFF状態の場合に前記視線センサの出力に基づく前記走行装置の制御を実行しない請求項7に記載の作業車。
【請求項9】
作業装置と、
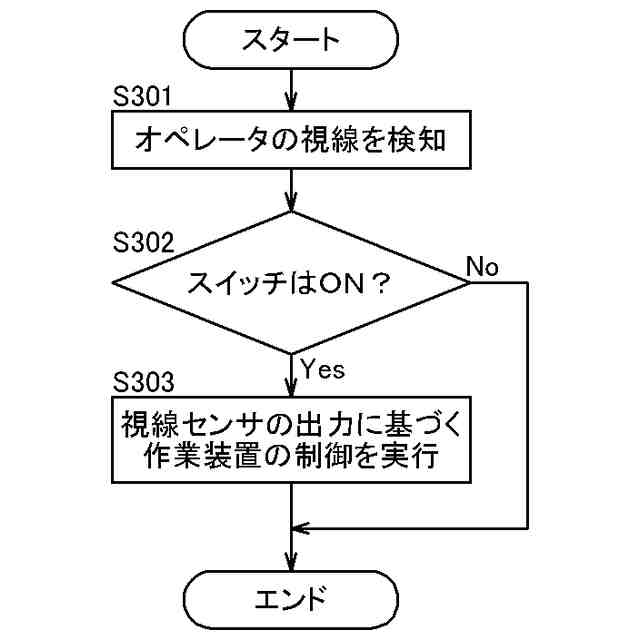
前記視線センサの出力に基づいて前記作業装置を制御する作業制御部と、を備える請求項1または2に記載の作業車。
【請求項10】
人為操作を受け付けるスイッチを備え、
前記作業制御部は、前記スイッチがON状態の場合に前記視線センサの出力に基づく前記作業装置の制御を実行し、前記スイッチがOFF状態の場合に前記視線センサの出力に基づく前記作業装置の制御を実行しない請求項9に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1に開示されたトラクタは、障害物衝突回避機能を有する。障害物センサが障害物を検知すると、車速の低下や停止等の処理が実行される。
【先行技術文献】
【特許文献】
【0003】
特開2019-192024号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
障害物センサの検知領域は、比較的広めに設定されがちである。そうすると、オペレータが障害物を視認して衝突の可能性は無いと判断している場合にも、障害物センサが障害物を検知して作業車が減速や停車を行う事態が起こり得る。この場合、作業車の作業効率や利便性が低下してしまう。
【0005】
本発明の目的は、作業車の作業効率や利便性の低下を抑制することにある。
【課題を解決するための手段】
【0006】
上述した課題を解決する手段として、本発明の作業車は、車外の検知領域の状況を検知する車外センサと、運転部に搭乗したオペレータの視線を検知する視線センサと、前記車外センサの出力と前記視線センサの出力とに基づいて処理を実行する処理部と、を備え、前記処理部は、前記オペレータが前記検知領域を見ていると判断した場合に第1処理を実行し、前記オペレータが前記検知領域を見ていないと判断した場合に前記第1処理と異なる第2処理を実行することを特徴とする。
【0007】
上記の特徴によれば、オペレータが検知領域を見ているか否かに応じて異なる処理が実行される。例えば、車外センサが障害物を検知したときに、オペレータが検知領域を見ている場合は障害物の報知処理(第1処理の例)が行われ、オペレータが検知領域を見ていない場合は減速の処理(第2処理の例)が行われる。このように上記の特徴によれば、作業車の作業効率や利便性の低下を抑制することができる。
【0008】
上述した課題を解決する手段として、本発明の作業車は、障害物を検知する車外センサと、運転部に搭乗したオペレータの視線を検知する視線センサと、前記車外センサの出力と前記視線センサの出力とに基づいて処理を実行する処理部と、を備え、前記処理部は、前記オペレータが前記障害物を見ていると判断した場合に第1処理を実行し、前記オペレータが前記障害物を見ていないと判断した場合に前記第1処理と異なる第2処理を実行することを特徴とする。
【0009】
上記の特徴によれば、オペレータが障害物を見ているか否かに応じて異なる処理が実行される。例えば、車外センサが障害物を検知したときに、オペレータが障害物を見ている場合は障害物の報知処理(第1処理の例)が行われ、オペレータが障害物を見ていない場合は減速の処理(第2処理の例)が行われる。このように上記の特徴によれば、作業車の作業効率や利便性の低下を抑制することができる。
【0010】
本発明において、前記視線センサは、前記運転部に設けられ前記オペレータの顔を撮影するカメラであると好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
蠅捕獲器
1日前
個人
遠投コマセ籠
2日前
個人
防護柵
16日前
個人
多機能の除草具
5日前
個人
イカ釣り用ヤエン
26日前
個人
釣り用ルアー
2日前
個人
動物用ケージ
24日前
井関農機株式会社
作業車両
16日前
個人
害虫の防止方法
1か月前
個人
アスパラガスの栽培方法
10日前
井関農機株式会社
歩行型管理機
23日前
井関農機株式会社
歩行型管理機
26日前
井関農機株式会社
歩行型管理機
10日前
井関農機株式会社
歩行型管理機
10日前
井関農機株式会社
収穫作業車両
19日前
個人
ウナギ目仔魚形質測定装置
11日前
株式会社オーツボ
海苔箱船
9日前
井関農機株式会社
作業車両
9日前
井関農機株式会社
作業車両
26日前
個人
除草方法
12日前
井関農機株式会社
作業車両
1か月前
松山株式会社
農作業機
16日前
松山株式会社
農作業機
12日前
井関農機株式会社
歩行型管理機
24日前
株式会社石垣
海洋生物の餌料生成装置
1か月前
個人
カラス捕獲具
2日前
株式会社アテックス
歩行型斜面草刈機
19日前
個人
穴堀具
16日前
株式会社下川精工
動物用歯ブラシ
2日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
23日前
株式会社シマノ
釣糸ガイド及び釣竿
9日前
株式会社クボタ
作業車
23日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ