TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024076610
公報種別
公開特許公報(A)
公開日
2024-06-06
出願番号
2022188242
出願日
2022-11-25
発明の名称
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20240530BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】障害物を検知する検知装置の検知能力を適切なものとする手段を提供する。
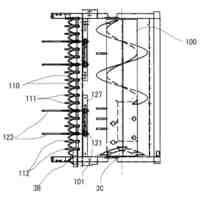
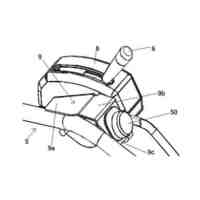
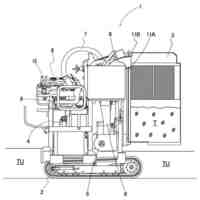
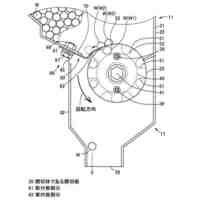
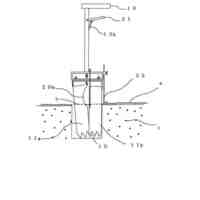
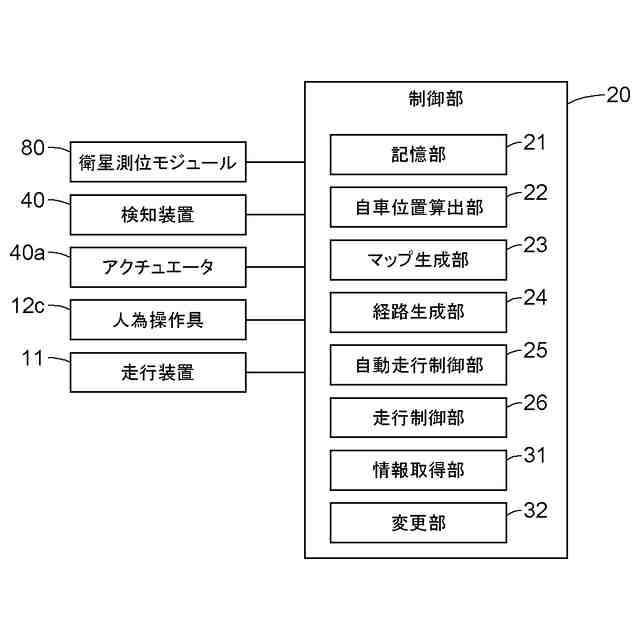
【解決手段】コンバイン1は、電磁波又は音波である検査波を放射して反射波を測定することにより機体の周囲の障害物を検知する検知装置40と、圃場情報及び作業情報のうち少なくとも1つを取得する情報取得部と、情報取得部が取得した情報に基づいて、検知装置40の機体に対する高さ、及び検査波の上下放射方向RDのうち少なくとも1つの自動的な変更を実行する変更部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
電磁波又は音波である検査波を放射して反射波を測定することにより機体の周囲の障害物を検知する検知装置と、
圃場情報及び作業情報のうち少なくとも1つを取得する情報取得部と、
前記情報取得部が取得した情報に基づいて、前記検知装置の前記機体に対する高さ、及び前記検査波の上下放射方向のうち少なくとも1つの自動的な変更を実行する変更部と、を備える作業車。
続きを表示(約 680 文字)
【請求項2】
前記情報取得部は、前記検知装置が測定した反射波に基づいて前記圃場情報を取得する請求項1に記載の作業車。
【請求項3】
前記情報取得部は、前記検知装置が測定した反射波のノイズレベルを前記圃場情報として取得し、
前記変更部は、前記ノイズレベルに基づいて前記変更を実行する請求項2に記載の作業車。
【請求項4】
前記変更部は、前記ノイズレベルが所定の閾値以下となる範囲内で前記上下放射方向ができるだけ下向きとなるように前記変更を実行する請求項3に記載の作業車。
【請求項5】
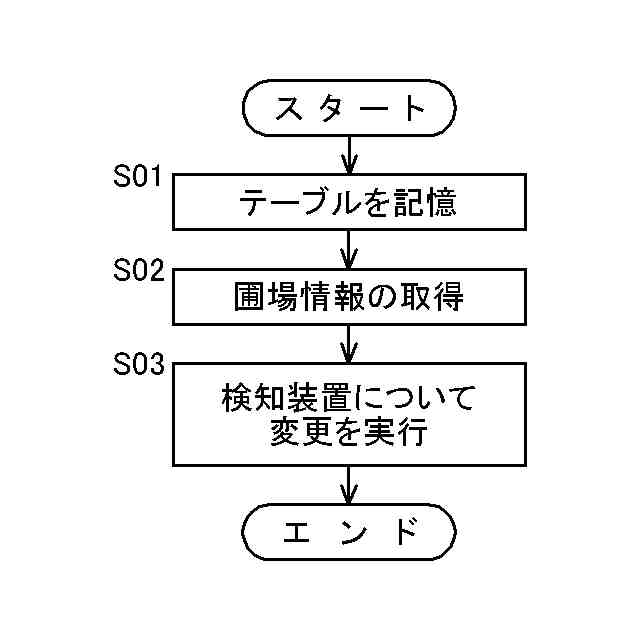
前記ノイズレベルに対応して予め定められた前記検知装置の前記機体に対する高さ又は前記上下放射方向を示すテーブルを記憶する記憶部を更に備え、
前記変更部は、前記ノイズレベル及び前記テーブルに基づいて前記変更を実行する請求項3に記載の作業車。
【請求項6】
作業種別ごとに予め定められた前記検知装置の前記機体に対する高さ又は前記上下放射方向を示すテーブルを記憶する記憶部を更に備え、
前記情報取得部は、作業種別を前記作業情報として取得し、
前記変更部は、前記作業種別及び前記テーブルに基づいて前記変更を実行する請求項1に記載の作業車。
【請求項7】
前記検知装置からの検知結果に基づいて自動走行を制御する自動走行制御部を更に備え、
前記情報取得部は、前記自動走行の前に実行される圃場外周の走行の際に情報の取得を実行する請求項1から6のいずれか1項に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
圃場で作業を行う作業車として、例えば、特許文献1に記載のものが既に知られている。この作業車(特許文献1では「コンバイン」)は、走査ビーム式の障害物センサ(LiDar)を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2021-006011号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
走査ビーム式の障害物センサでは、反射波のマルチパスによるノイズが問題になる場合がある。マルチパスによるノイズは、圃場の状態、例えば作物の種類や生育状況等により変化する可能性がある。マルチパスによるノイズが大きくなると、障害物の検知が妨げられるおそれがある。
【0005】
本発明の目的は、障害物を検知する検知装置の検知能力を適切なものとする手段を提供することにある。
【課題を解決するための手段】
【0006】
上述した課題を解決する手段として、本発明の作業車は、電磁波又は音波である検査波を放射して反射波を測定することにより機体の周囲の障害物を検知する検知装置と、圃場情報及び作業情報のうち少なくとも1つを取得する情報取得部と、前記情報取得部が取得した情報に基づいて、前記検知装置の前記機体に対する高さ、及び前記検査波の上下放射方向のうち少なくとも1つの自動的な変更を実行する変更部と、を備えることを特徴とする。
【0007】
発明者らは、検知装置の出力に重畳するマルチパスによるノイズは、検知装置の地上高さや検査波の上下照射方向に応じて変動することを見いだし、本願発明に想到するに至った。上記の特徴によれば、情報取得部が取得した情報に基づいて、検知装置の機体に対する高さ、及び検査波の上下放射方向のうち少なくとも1つの自動的な変更が実行されるので、検知装置の検知能力を適切なものとすることが可能となる。
【0008】
例えば、取得された圃場情報が、測定された反射波がノイズを多く含むことを示す場合(またはノイズの多くなり易い圃場である(または作物である)ことを示す場合)に、変更部が検知装置の高さを大きくする(または上下放射方向を上へ変更する)ことにより、反射波に含まれるノイズが低減される。
【0009】
例えば、実行される作業が草刈り(雑草除去)である場合、雑草の存在により反射波のノイズが大きくなることが予想される。取得された作業情報が、実行予定の作業が雑草除去であることを示す場合に、変更部が検知装置の高さを大きくする(または上下放射方向を上へ変更する)ことにより、反射波に含まれるノイズが低減される。
【0010】
本発明において、前記情報取得部は、前記検知装置が測定した反射波に基づいて前記圃場情報を取得すると好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
植木鉢
1か月前
個人
防護柵
10日前
個人
イカ釣り用ヤエン
20日前
個人
動物用ケージ
18日前
井関農機株式会社
作業車両
1か月前
個人
産卵床及び卵保護方法
27日前
個人
害虫の防止方法
24日前
井関農機株式会社
作業車両
10日前
井関農機株式会社
コンバイン
1か月前
個人
アスパラガスの栽培方法
4日前
株式会社徳工
集材装置
1か月前
井関農機株式会社
歩行型管理機
17日前
井関農機株式会社
歩行型管理機
4日前
井関農機株式会社
歩行型管理機
4日前
個人
ウナギ目仔魚形質測定装置
5日前
株式会社マツバラ
消毒剤
1か月前
井関農機株式会社
収穫作業車両
13日前
井関農機株式会社
歩行型管理機
20日前
株式会社環緑
育苗用ポット
1か月前
井関農機株式会社
作業車両
25日前
株式会社シマノ
釣竿
26日前
個人
除草方法
6日前
井関農機株式会社
作業車両
3日前
井関農機株式会社
脱穀装置
1か月前
株式会社オーツボ
海苔箱船
3日前
株式会社寺田製作所
茶生葉摘採機
1か月前
井関農機株式会社
作業車両
20日前
松山株式会社
農作業機
6日前
井関農機株式会社
水田作業機
1か月前
松山株式会社
農作業機
10日前
松山株式会社
農作業機
1か月前
松山株式会社
農作業機
1か月前
株式会社石垣
海洋生物の餌料生成装置
24日前
株式会社アテックス
歩行型斜面草刈機
1か月前
株式会社アテックス
歩行型斜面草刈機
1か月前
個人
穴堀具
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ