TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024085050
公報種別
公開特許公報(A)
公開日
2024-06-26
出願番号
2022199372
出願日
2022-12-14
発明の名称
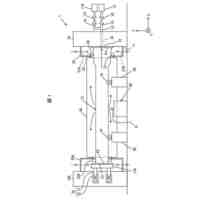
システム及び作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20240619BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】作業車の走行を支援するためのシステムにおいて、作業車の走行の自由度を高める。
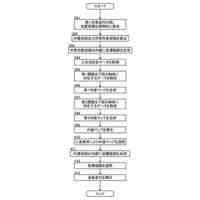
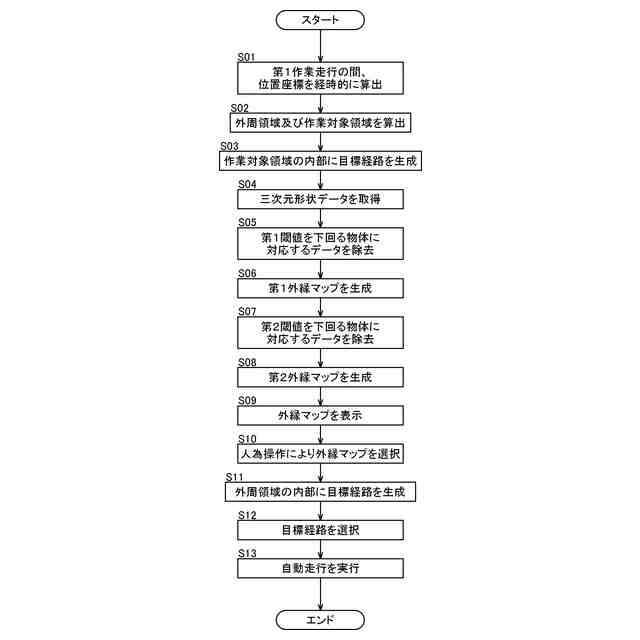
【解決手段】作業車の走行を支援するためのシステムであって、作業車が圃場を走行している時に作業車に設けられたセンサから圃場の外縁領域の形状を示す三次元形状データを経時的に取得するデータ取得部と、三次元形状データに基づいて、圃場走行中の作業車が越境不能な境界を示す複数の外縁マップを生成する生成部と、が備えられ、生成部は、第1閾値を下回る大きさの物体が除去処理された第1外縁マップと、第1閾値よりも大きい第2閾値を下回る大きさの物体が除去処理された第2外縁マップと、が含まれるように外縁マップを生成するように構成されている。
【選択図】図11
特許請求の範囲
【請求項1】
作業車の走行を支援するためのシステムであって、
前記作業車が圃場を走行している時に前記作業車に設けられたセンサから前記圃場の外縁領域の形状を示す三次元形状データを経時的に取得するデータ取得部と、
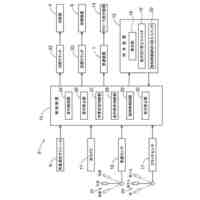
前記三次元形状データに基づいて、圃場走行中の前記作業車が越境不能な境界を示す複数の外縁マップを生成する生成部と、が備えられ、
前記生成部は、第1閾値を下回る大きさの物体が除去処理された第1外縁マップと、前記第1閾値よりも大きい第2閾値を下回る大きさの物体が除去処理された第2外縁マップと、が含まれるように前記外縁マップを生成するように構成されているシステム。
続きを表示(約 400 文字)
【請求項2】
人為操作により複数の前記外縁マップのうちの一つが選択されると、選択された前記外縁マップを基に前記作業車の走行を支援する請求項1に記載のシステム。
【請求項3】
複数の前記外縁マップを表示する表示部が備えられている請求項1に記載のシステム。
【請求項4】
前記表示部は、複数の前記外縁マップを切り替えて表示可能に構成されている請求項3に記載のシステム。
【請求項5】
前記作業車が前記外縁マップにより示される境界の外側へ出ることがないように前記作業車の走行を制御する走行制御部が備えられている請求項1に記載のシステム。
【請求項6】
前記生成部は、物体の除去処理がされていない第3外縁マップを生成する請求項1から5のいずれか一項に記載のシステム。
【請求項7】
請求項1に記載のシステムが備えられた作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車の走行を支援するためのシステム及び当該システムが備えられた作業車に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、コンバインが開示されている。このコンバインは、圃場の境界線の地図位置を示す境界線データを利用して、その走行が制御される。
【先行技術文献】
【特許文献】
【0003】
特開2019-106983号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されたコンバインでは、境界線データは、圃場における当該作業車の走行軌跡に基づいて生成される。すなわち、境界線データが示す圃場の境界線は平面的なものである。
【0005】
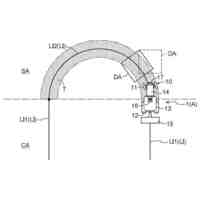
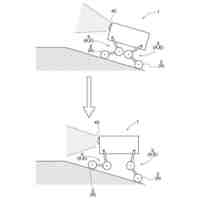
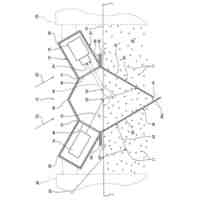
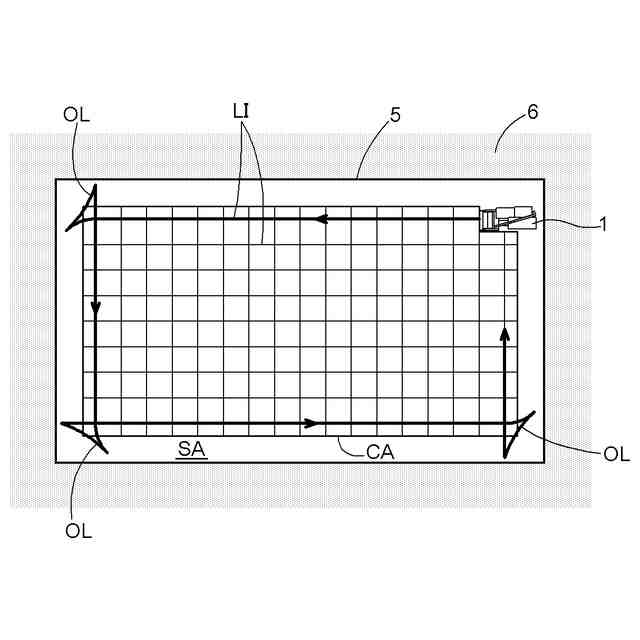
発明者らは、圃場の外縁領域の三次元的な形状を取得して外縁マップを生成し、その外縁マップを用いて作業車の走行を制御することを検討した。圃場の外縁領域には、圃場を囲む盛り土である畦畔や、水門の開閉機構などの、立体的な障害物が存在する。障害物の高さが小さい場合には、作業車の一部が圃場の境界線を超えるような位置まで、コンバインが走行可能となる可能性がある。
【0006】
ここで圃場の外縁領域には、ススキやヒガンバナ、セイタカアワダチソウなどの草木や、柔軟なロープなど、作業車が接触しても走行の妨げとならない物体が存在する場合がある。また、大きな物体であっても、草木の種類等によっては、オペレータの判断により、作業車が接触しても走行の妨げとならないものと判断されるものがある。つまり、同じ大きさの物体であっても、圃場の外縁領域に存在する草木等の種類よっては、作業車の走行の妨げとならない物体であるか否かの判断が異なる場合がある。実際には作業車の走行の妨げとならないと判断される物体であるにも関わらず、そのような物体までもが外縁マップに反映されてしまうと、それらの物体を避けるように作業車の走行が制御されることになる。この場合、作業車が走行可能な領域が狭められるため、好ましくない。
【0007】
本発明の目的は、作業車の走行を支援するためのシステムにおいて、作業車の走行の自由度を高めることにある。
【課題を解決するための手段】
【0008】
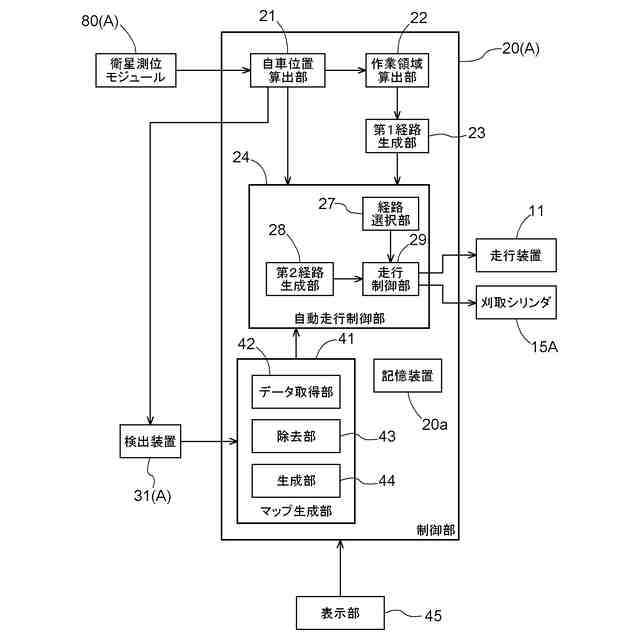
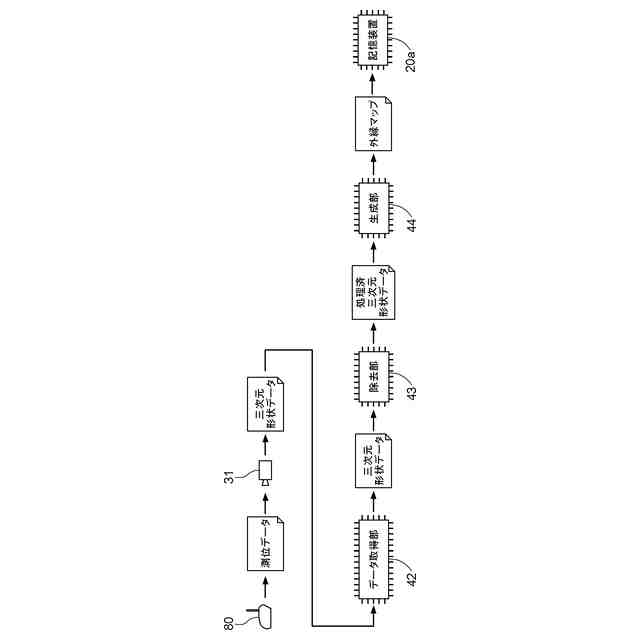
上述した課題を解決する手段として、本発明のシステムは、作業車の走行を支援するためのシステムであって、前記作業車が圃場を走行している時に前記作業車に設けられたセンサから前記圃場の外縁領域の形状を示す三次元形状データを経時的に取得するデータ取得部と、前記三次元形状データに基づいて、圃場走行中の前記作業車が越境不能な境界を示す複数の外縁マップを生成する生成部と、が備えられ、前記生成部は、第1閾値を下回る大きさの物体が除去処理された第1外縁マップと、前記第1閾値よりも大きい第2閾値を下回る大きさの物体が除去処理された第2外縁マップと、が含まれるように前記外縁マップを生成するように構成されていることを特徴とする。
【0009】
上記の特徴構成によれば、取得された三次元形状データから、第1閾値を基に除去処理された第1外縁マップと、第2閾値を基に除去処理された第2外縁マップとが生成される。従って、作業車の走行を支援する際、第1外縁マップ又は第2外縁マップのいずれかを利用することが可能となり、作業車の走行の自由度を高めることができる。
【0010】
本発明において、人為操作により複数の前記外縁マップのうちの一つが選択されると、選択された前記外縁マップを基に前記作業車の走行を支援すると好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
23日前
株式会社クボタ
作業車
19日前
株式会社クボタ
収穫機
11日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
19日前
株式会社クボタ
収穫機
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
19日前
株式会社クボタ
システム
2日前
株式会社クボタ
圃場作業車
4日前
株式会社クボタ
野菜収穫機
19日前
株式会社クボタ
葉菜類収穫機
11日前
株式会社クボタ
気密試験装置
22日前
株式会社クボタ
気密試験装置
22日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
浮遊物観測装置
2日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
システム及び作業車
3日前
株式会社クボタ
廃棄物の圧縮成形装置
3日前
株式会社クボタ
制御システム及び作業車
2日前
株式会社クボタ
走行制御システム及び収穫機
9日前
株式会社クボタ
車両制御システム及び作業車
9日前
株式会社クボタ
圧力保持ユニット及び反転装置
19日前
株式会社クボタ
作業車及び作業車を制御するシステム
2日前
株式会社クボタ
セグメント連結具及びセグメント連結方法
10日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ