TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024085615
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022200221
出願日
2022-12-15
発明の名称
制御システム及び作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20240620BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】圃場内を作業車が手動走行中に周囲に障害物があった場合に、適切に対応することが可能な制御システムが要望されている。また、圃場内を手動走行中に周囲に障害物があった場合に、適切に対応することが可能な作業車が要望されている。
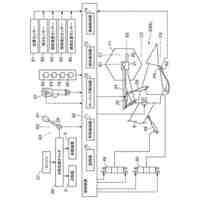
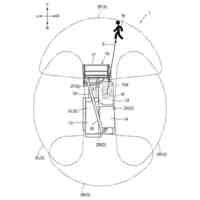
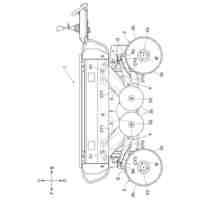
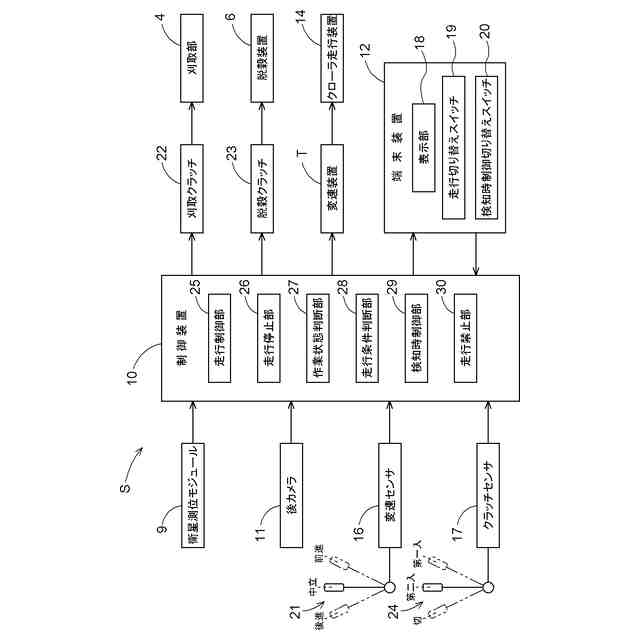
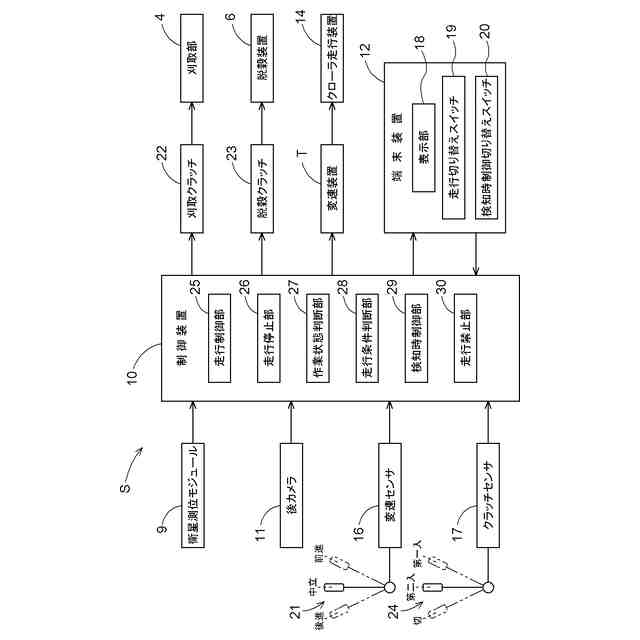
【解決手段】制御システムSは、圃場における作業を行う作業装置4、6と、周囲の障害物を検知する障害物センサ11と、を有する作業車を制御する。制御システムSは、作業車を手動走行又は自動走行に切り替える走行制御部25と、圃場内を作業車が自動走行中に、障害物センサ11が障害物を検知すると、作業車の走行を停止する走行停止部26と、圃場内を作業車が手動走行中に、障害物センサ11が障害物を検知すると、障害物センサ11による障害物の検知に対応する制御である検知時制御を実行する検知時制御部29と、を備えている。
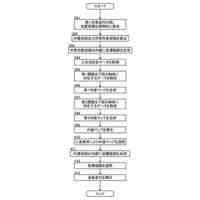
【選択図】図3
特許請求の範囲
【請求項1】
圃場における作業を行う作業装置と、周囲の障害物を検知する障害物センサと、を有する作業車を制御するための制御システムであって、
前記作業車を手動走行又は自動走行に切り替える走行制御部と、
圃場内を前記作業車が自動走行中に、前記障害物センサが障害物を検知すると、前記作業車の走行を停止する走行停止部と、
圃場内を前記作業車が手動走行中に、前記障害物センサが障害物を検知すると、前記障害物センサによる障害物の検知に対応する制御である検知時制御を実行する検知時制御部と、を備えている制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記検知時制御部は、前記検知時制御を実行可能な有効状態と、前記検知時制御を実行しない無効状態とに、人為的に切り替え操作可能に構成されている請求項1に記載の制御システム。
【請求項3】
前記作業装置が駆動していない場合、前記検知時制御部は、前記検知時制御を実行しない請求項1又は2に記載の制御システム。
【請求項4】
前記作業装置が駆動している場合、前記検知時制御部が前記検知時制御を実行しても、前記作業装置が駆動を停止しない請求項1又は2に記載の制御システム。
【請求項5】
前記検知時制御部は、前記検知時制御として、前記作業車の走行を停止する請求項1又は2に記載の制御システム。
【請求項6】
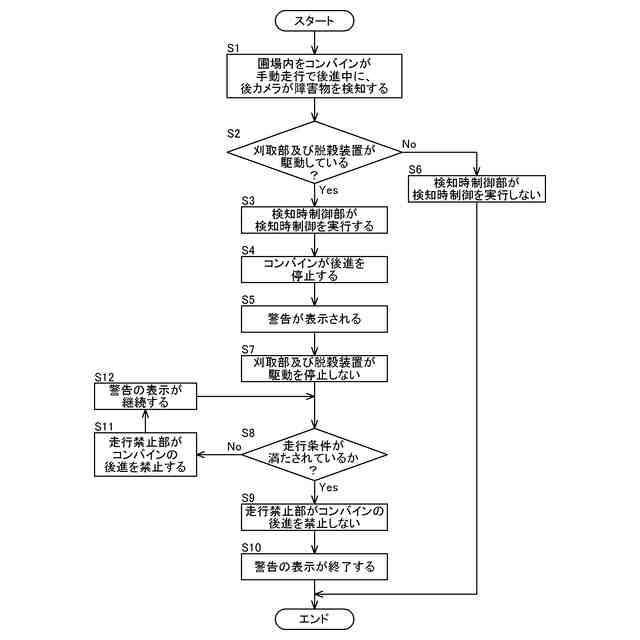
前記作業車が前後一方に走行中に、前記検知時制御部が前記検知時制御を実行した場合、所定の走行条件が満たされるまで、前記作業車の前記前後一方への走行を禁止する走行禁止部を備えている請求項5に記載の制御システム。
【請求項7】
前記作業車は、前記作業車の走行速度を変速する変速装置と、前記変速装置を人為的に変速操作するための変速操作具と、を有し、
前記走行条件は、前記変速操作具が中立位置に位置し、かつ、前記障害物センサが前記作業車の前記前後一方における障害物を検知していないことである請求項6に記載の制御システム。
【請求項8】
前記走行禁止部は、前記走行条件が満たされていない場合でも、前記作業車の前後他方への走行を禁止しない請求項6に記載の制御システム。
【請求項9】
前記作業車は、報知装置を有し、
前記検知時制御部は、前記検知時制御として、前記報知装置による報知を行う請求項1又は2に記載の制御システム。
【請求項10】
圃場における作業を行う作業装置と、
周囲の障害物を検知する障害物センサと、
手動走行又は自動走行に切り替える走行制御部と、
圃場内を自動走行中に、前記障害物センサが障害物を検知すると、走行を停止する走行停止部と、
圃場内を手動走行中に、前記障害物センサが障害物を検知すると、前記障害物センサによる障害物の検知に対応する制御である検知時制御を実行する検知時制御部と、を備えている作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御システム及び作業車に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、制御システムとして、例えば、特許文献1に記載の制御システムが知られている。特許文献1に記載の制御システムは、圃場における作業を行う作業装置と、周囲の障害物を検知する障害物センサと、を有する作業車を制御するための制御システムである。特許文献1に記載の制御システムは、作業車を手動走行又は自動走行に切り替える走行制御部と、圃場内を前記作業車が自動走行中に、障害物センサが障害物を検知すると、作業車の走行を停止する走行停止部と、を備えている。特許文献1に記載の制御システムによれば、圃場内を作業車が自動走行中に障害物センサが障害物を検知した場合、作業車が走行を停止する。
【先行技術文献】
【特許文献】
【0003】
特開2019-192024号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の制御システムでは、圃場内を作業車が手動走行中に周囲に障害物があった場合に、適切に対応する点で改善の余地がある。
【0005】
上記状況に鑑み、圃場内を作業車が手動走行中に周囲に障害物があった場合に、適切に対応することが可能な制御システムが要望されている。また、圃場内を手動走行中に周囲に障害物があった場合に、適切に対応することが可能な作業車が要望されている。
【課題を解決するための手段】
【0006】
本発明の特徴は、圃場における作業を行う作業装置と、周囲の障害物を検知する障害物センサと、を有する作業車を制御するための制御システムであって、前記作業車を手動走行又は自動走行に切り替える走行制御部と、圃場内を前記作業車が自動走行中に、前記障害物センサが障害物を検知すると、前記作業車の走行を停止する走行停止部と、圃場内を前記作業車が手動走行中に、前記障害物センサが障害物を検知すると、前記障害物センサによる障害物の検知に対応する制御である検知時制御を実行する検知時制御部と、を備えていることにある。
【0007】
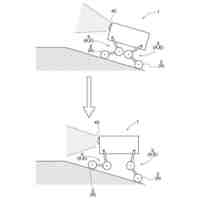
本特徴構成によれば、圃場内を作業車が手動走行中に、障害物センサが障害物を検知すると、検知時制御部が検知時制御を実行する。ここで、検知時制御部によって検知時制御が実行されることにより、例えば、作業車が走行を停止したり、報知装置が報知を行なったりすることが考えられる。これにより、圃場内を作業車が手動走行中に周囲に障害物があった場合に、適切に対応することができる。
【0008】
さらに、本発明において、前記検知時制御部は、前記検知時制御を実行可能な有効状態と、前記検知時制御を実行しない無効状態とに、人為的に切り替え操作可能に構成されていると好適である。
【0009】
本特徴構成によれば、作業者が検知時制御部を有効状態と無効状態とに人為的に切り替え操作することができる。これにより、検知時制御部が検知時制御を実行するか否かを、作業者が作業状況に応じて適宜選択することができる。
【0010】
さらに、本発明において、前記作業装置が駆動していない場合、前記検知時制御部は、前記検知時制御を実行しないと好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
24日前
株式会社クボタ
作業車
20日前
株式会社クボタ
収穫機
12日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
20日前
株式会社クボタ
収穫機
10日前
株式会社クボタ
作業車
10日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
10日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
10日前
株式会社クボタ
作業車
5日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
20日前
株式会社クボタ
作業車
20日前
株式会社クボタ
システム
3日前
株式会社クボタ
圃場作業車
5日前
株式会社クボタ
野菜収穫機
20日前
株式会社クボタ
葉菜類収穫機
12日前
株式会社クボタ
気密試験装置
23日前
株式会社クボタ
気密試験装置
23日前
株式会社クボタ
電解水生成装置
11日前
株式会社クボタ
浮遊物観測装置
3日前
株式会社クボタ
電解水生成装置
11日前
株式会社クボタ
電解水生成装置
11日前
株式会社クボタ
電解水生成装置
11日前
株式会社クボタ
システム及び作業車
4日前
株式会社クボタ
廃棄物の圧縮成形装置
4日前
株式会社クボタ
制御システム及び作業車
3日前
株式会社クボタ
走行制御システム及び収穫機
10日前
株式会社クボタ
車両制御システム及び作業車
10日前
株式会社クボタ
圧力保持ユニット及び反転装置
20日前
株式会社クボタ
作業車及び作業車を制御するシステム
3日前
株式会社クボタ
セグメント連結具及びセグメント連結方法
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ