TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024077990
公報種別
公開特許公報(A)
公開日
2024-06-10
出願番号
2022190267
出願日
2022-11-29
発明の名称
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
B60G
17/015 20060101AFI20240603BHJP(車両一般)
要約
【課題】載置部の水平姿勢を適切に保持できる作業車を提供すること。
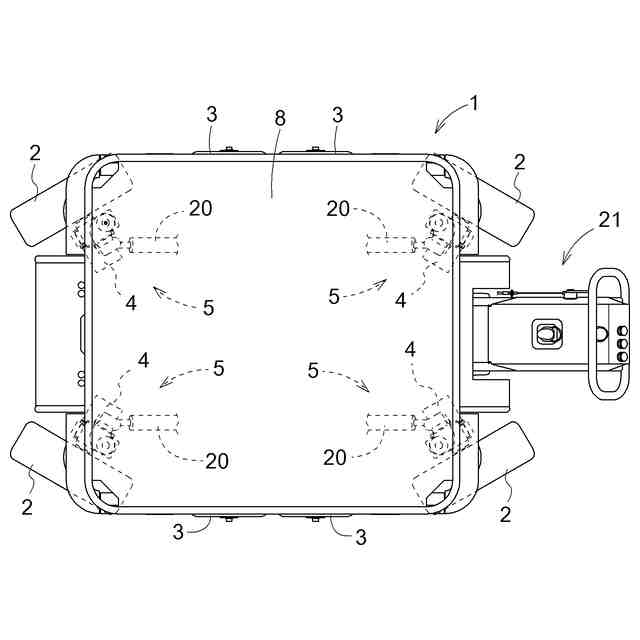
【解決手段】荷物を積載可能な積載部を有する車両本体と、車両本体の左右両側における前後夫々に位置する複数の走行車輪と、車両本体に支持されるとともに複数の走行車輪を車両本体に対して位置変更可能に支持する支持機構と、車両本体の傾斜状態を検出する傾斜検出部と、車両本体の傾斜状態に基づいて積載部が水平姿勢になるように支持機構の動作を制御可能な制御装置と、が備えられている。制御装置は、複数の走行車輪が接地する地面の傾斜角を算出可能に構成され、かつ、複数の走行車輪が停止した状態で地面が予め設定された設定傾斜角の範囲内で傾斜している場合に支持機構の動作を制御せず、複数の走行車輪が停止した状態で地面が設定傾斜角以上に傾斜している場合に支持機構の動作を制御し続けるように構成されている作業車。
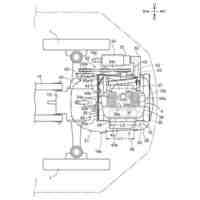
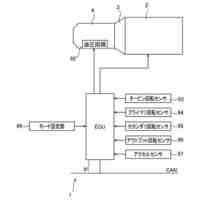
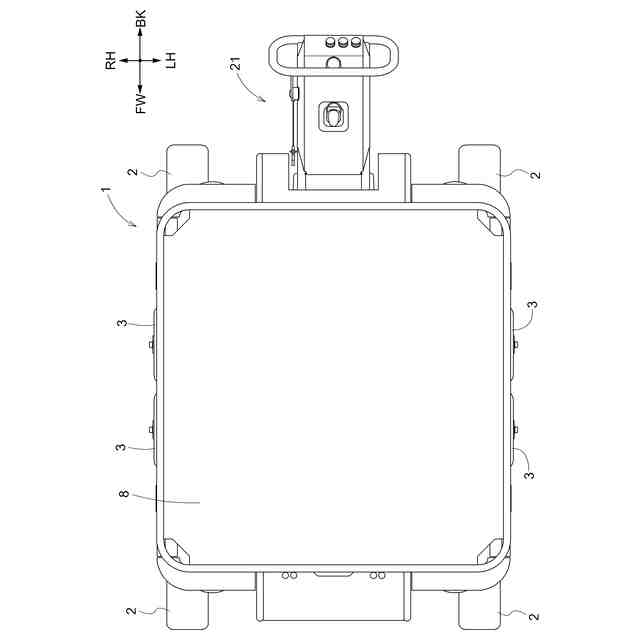
【選択図】図8
特許請求の範囲
【請求項1】
荷物を積載可能な積載部を有する車両本体と、
前記車両本体の左右両側における前後夫々に位置する複数の走行車輪と、
前記車両本体に支持されるとともに前記複数の走行車輪を前記車両本体に対して位置変更可能に支持する支持機構と、
前記車両本体の傾斜状態を検出する傾斜検出部と、
前記車両本体の傾斜状態に基づいて前記積載部が水平姿勢になるように前記支持機構の動作を制御可能な制御装置と、が備えられ、
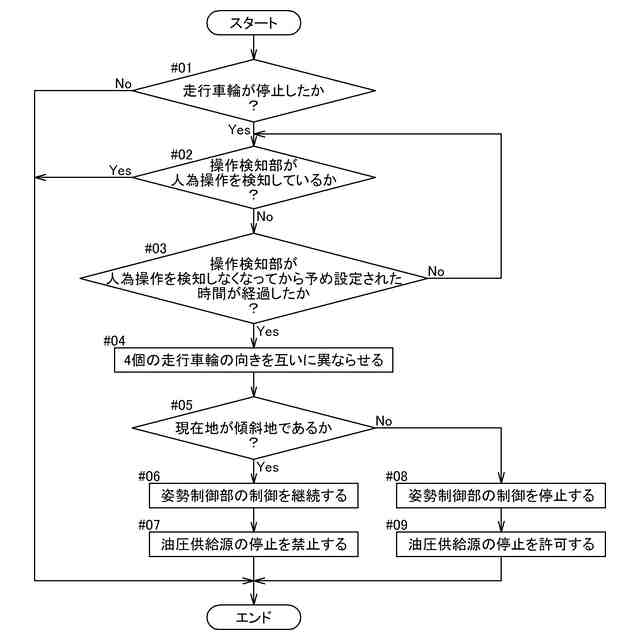
前記制御装置は、前記複数の走行車輪が接地する地面の傾斜角を算出可能に構成され、かつ、前記複数の走行車輪が停止した状態で前記地面が予め設定された設定傾斜角の範囲内で傾斜している場合に前記支持機構の動作を制御せず、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角以上に傾斜している場合に前記支持機構の動作を制御し続けるように構成されている作業車。
続きを表示(約 900 文字)
【請求項2】
前記支持機構を動作させるための駆動エネルギーを供給する駆動源が備えられ、
前記制御装置は、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角の範囲内で傾斜している場合に前記駆動源の駆動停止を許可し、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角以上に傾斜している場合に前記駆動源の駆動停止を禁止するように構成されている請求項1に記載の作業車。
【請求項3】
前記駆動源は、前記複数の走行車輪に前記駆動エネルギーを供給可能に構成され、
前記制御装置は、前記複数の走行車輪が停止した状態で前記複数の走行車輪に前記駆動エネルギーを供給しない請求項2に記載の作業車。
【請求項4】
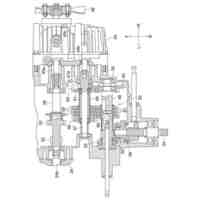
前記駆動エネルギーを受けた作動油の給排によって前記複数の走行車輪の夫々を駆動する油圧モータと、
前記油圧モータに対する前記作動油の給排量を変更可能な制御弁と、が備えられ、
前記制御装置は、前記制御弁を閉じて前記油圧モータに対する前記作動油の給排を遮断することによって前記複数の走行車輪を停止させるように構成されている請求項3に記載の作業車。
【請求項5】
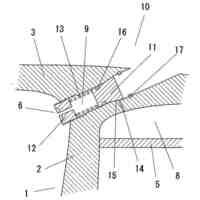
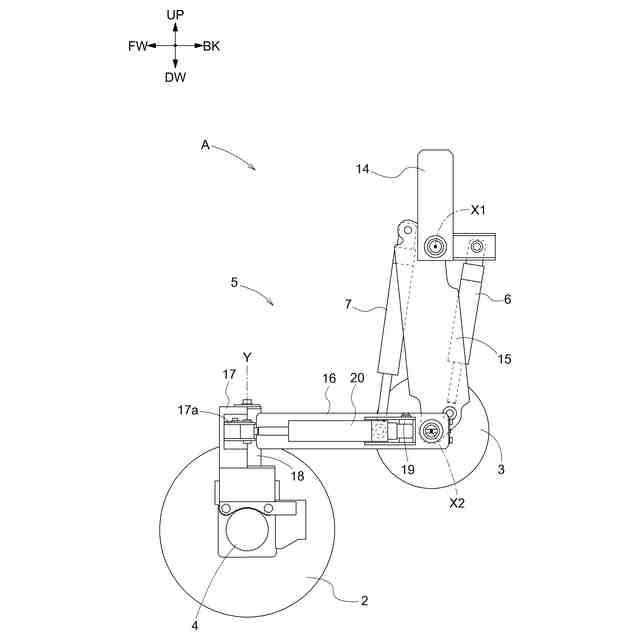
前記支持機構に、前記車両本体に対する前記走行車輪の位置変更用の複数の伸縮アクチュエータと、
前記複数の伸縮アクチュエータの夫々の伸縮量を検出する伸縮量検出部と、が備えられ、
前記制御装置は、前記車両本体の傾斜状態と、前記複数の伸縮アクチュエータの夫々の伸縮量と、に基づいて前記積載部が水平姿勢になるように前記複数の伸縮アクチュエータの夫々の動作を制御可能なように構成され、
前記制御装置は、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角の範囲内で傾斜している場合に前記複数の伸縮アクチュエータの夫々の動作を制御せず、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角以上に傾斜している場合に前記複数の伸縮アクチュエータの夫々の動作を制御し続けるように構成されている請求項1から4の何れか一項に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、各別に操舵が可能な複数の走行車輪を有する作業車に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
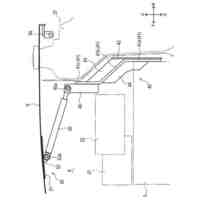
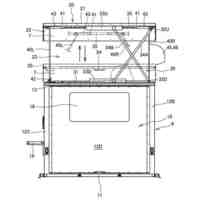
例えば特許文献1に開示された作業車に、荷物を積載可能な積載部を有する車両本体と、車両本体の左右両側における前後夫々に位置する複数の走行車輪と、複数の走行車輪を車両本体に対して位置変更可能に支持する支持機構(文献では「屈折リンク機構」)と、が備えられている。制御装置が支持機構を制御することによって、積載部が水平姿勢に保持される。
【先行技術文献】
【特許文献】
【0003】
特開2020-1443号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、作業車が停止すると、走行装置の動作が停止し、支持機構の動作も停止する。このとき、作業車の停止位置が傾斜地であると、支持機構の動作停止によって載置部の水平姿勢が適切に保持されない虞がある。このため、支持機構を常に動作させる構成が考えられるが、支持機構を常に動作させると、ランニングコストの面で不利である。
【0005】
本発明の目的は、載置部の水平姿勢を適切に保持できる作業車を提供することにある。
【課題を解決するための手段】
【0006】
本発明の作業車は、荷物を積載可能な積載部を有する車両本体と、前記車両本体の左右両側における前後夫々に位置する複数の走行車輪と、前記車両本体に支持されるとともに前記複数の走行車輪を前記車両本体に対して位置変更可能に支持する支持機構と、前記車両本体の傾斜状態を検出する傾斜検出部と、前記車両本体の傾斜状態に基づいて前記積載部が水平姿勢になるように前記支持機構の動作を制御可能な制御装置と、が備えられ、前記制御装置は、前記複数の走行車輪が接地する地面の傾斜角を算出可能に構成され、かつ、前記複数の走行車輪が停止した状態で前記地面が予め設定された設定傾斜角の範囲内で傾斜している場合に前記支持機構の動作を制御せず、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角以上に傾斜している場合に前記支持機構の動作を制御し続けるように構成されていることを特徴とする。
【0007】
本発明によると、地面が設定傾斜角以上に傾斜している場合、制御装置は支持機構の動作を制御し続ける。このため、支持機構が動作停止する構成と比較して、載置部の水平姿勢が適切に保持される。また、地面の傾斜が設定傾斜角の範囲内である場合、地面は概ね水平に沿っているため、地面が傾斜している場合と比較して、載置部が水平姿勢に容易に保持される。このため、地面が設定傾斜角の範囲内で傾斜している場合、制御装置は支持機構の動作を制御しない。これにより、平坦な土地で制御装置が支持機構の動作を制御し続ける構成と比較して、ランニングコストが節減される。このように、本発明であれば、載置部の水平姿勢を適切に保持できる作業車が実現される。なお、本発明においては、『設定傾斜角の範囲内』は、設定傾斜角を含める範囲内であっても良いし、設定傾斜角を含まない範囲内であっても良い。『設定傾斜角の範囲内』が設定傾斜角を含める範囲内である場合、本発明における『設定傾斜角以上』は、設定傾斜角を含まずに『設定傾斜角よりも上の傾斜角』を意味するものであっても良い。また、『設定傾斜角の範囲内』が設定傾斜角を含まない範囲内である場合、『設定傾斜角以上』は設定傾斜角を含めるものであって良い。
【0008】
本発明において、前記支持機構を動作させるための駆動エネルギーを供給する駆動源が備えられ、前記制御装置は、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角の範囲内で傾斜している場合に前記駆動源の駆動停止を許可し、前記複数の走行車輪が停止した状態で前記地面が前記設定傾斜角以上に傾斜している場合に前記駆動源の駆動停止を禁止するように構成されていると好適である。
【0009】
駆動源は、支持機構を動作させるための駆動エネルギーを供給する。このため、駆動源が停止すると、支持機構が動作不能となり、制御装置が支持機構の動作を制御し続けられなくなる。本構成であれば、地面が設定傾斜角以上に傾斜している場合、制御装置は駆動源の駆動停止を禁止する。このため、制御装置は支持機構の動作を確実に制御できる。
【0010】
本発明において、前記駆動源は、前記複数の走行車輪に前記駆動エネルギーを供給可能に構成され、前記制御装置は、前記複数の走行車輪が停止した状態で前記複数の走行車輪に前記駆動エネルギーを供給しないと好適である。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
15日前
株式会社クボタ
作業車
19日前
株式会社クボタ
作業車
15日前
株式会社クボタ
作業車
15日前
株式会社クボタ
作業車
15日前
株式会社クボタ
作業車
15日前
株式会社クボタ
圃場作業機
1日前
株式会社クボタ
多目的車両
1日前
株式会社クボタ
農業用ロボット
16日前
株式会社クボタ
油圧装置および作業車
15日前
株式会社クボタ
遠心脱水機の運転方法
8日前
株式会社クボタ
作業車のボンネット構造
1日前
株式会社クボタ
農業用ロボットおよびプログラム
16日前
株式会社クボタケミックス
排水管、および、その排水管を用いた排水配管構造
15日前
株式会社クボタ
作業機
1日前
株式会社クボタケミックス
排水集合管
19日前
株式会社クボタ
穀粒判別システム
15日前
株式会社クボタ
作業機の油圧システム
8日前
株式会社クボタ
作業機又は作業機の自動走行制御システム
19日前
株式会社クボタ
作業機及び作業機の自動走行制御システム
19日前
株式会社クボタ
写真管理台帳作成システム、写真管理台帳作成方法及び写真管理台帳作成システム制御用プログラム
3日前
株式会社クボタ
モデル生成装置、推定装置、モデル生成方法および推定方法
15日前
個人
空気圧調節式ホイール。
23日前
エムケー精工株式会社
洗車装置
8日前
日本精機株式会社
車外表示装置
15日前
ダイハツ工業株式会社
車両
22日前
ダイハツ工業株式会社
車両
23日前
株式会社SUBARU
車両
16日前
日本化薬株式会社
ガス発生器
15日前
エムケー精工株式会社
車両処理装置
26日前
株式会社コーワ
フィルター清掃装置
11日前
豊田合成株式会社
乗員保護装置
16日前
株式会社豊田自動織機
車両
22日前
株式会社小糸製作所
ヒーター装置
22日前
株式会社小糸製作所
画像照射装置
16日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ