TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024140855
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023052201
出願日
2023-03-28
発明の名称
農業用ロボットおよびプログラム
出願人
株式会社クボタ
,
株式会社レグミン
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20241003BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】施設内において対象領域に応じた動作を好適に行うことができる農業用ロボットを提供する。
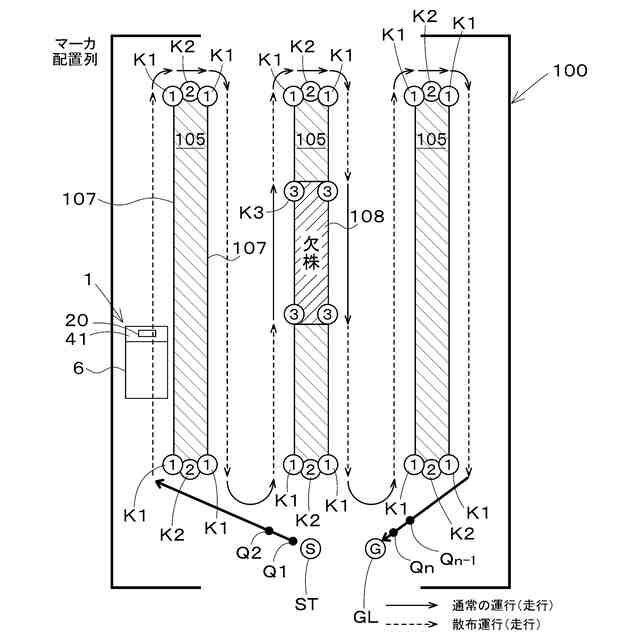
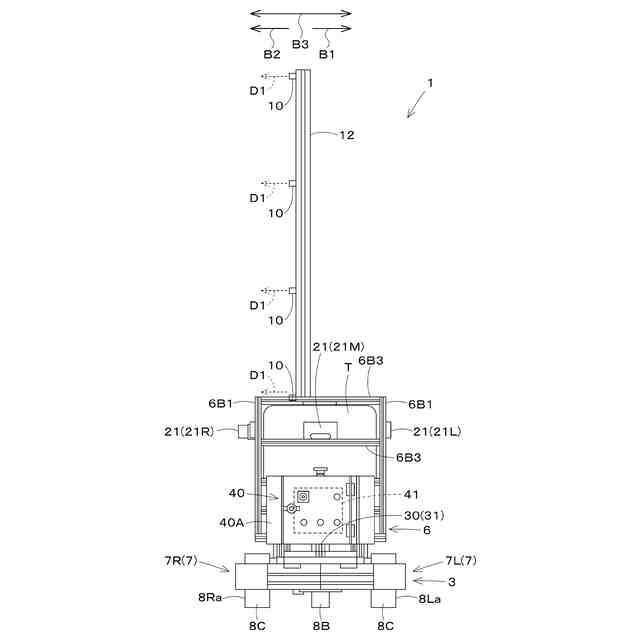
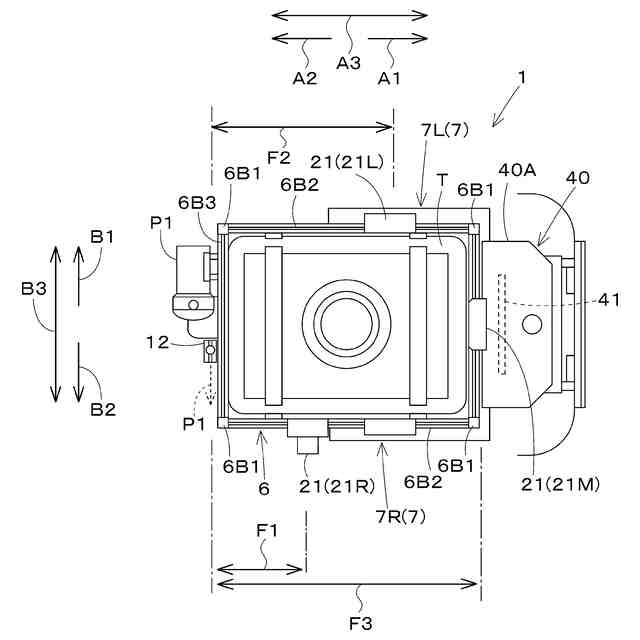
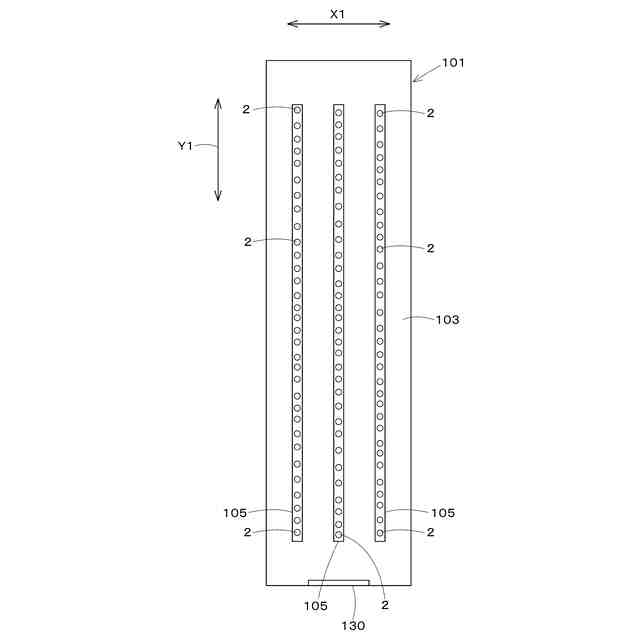
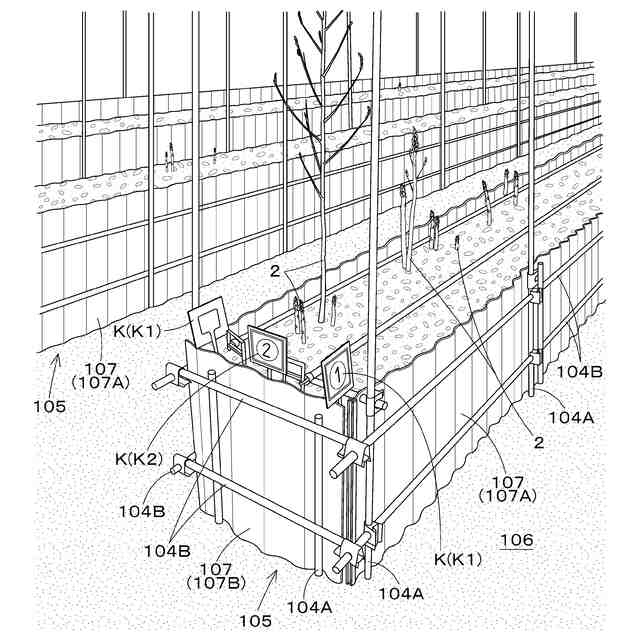
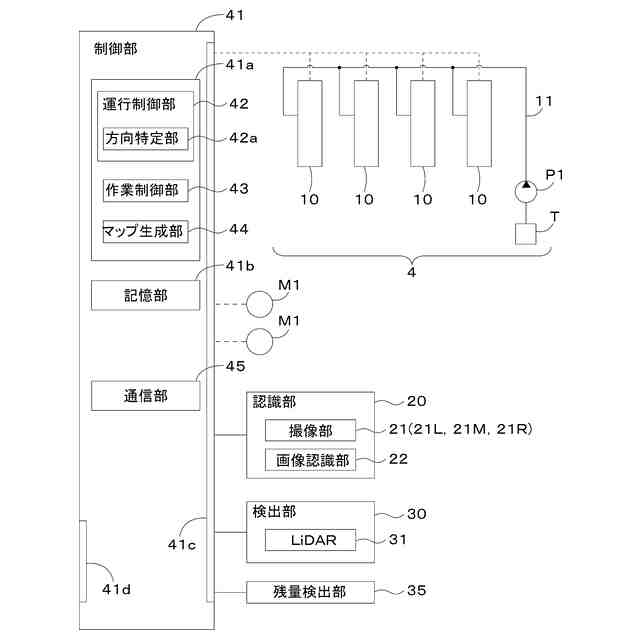
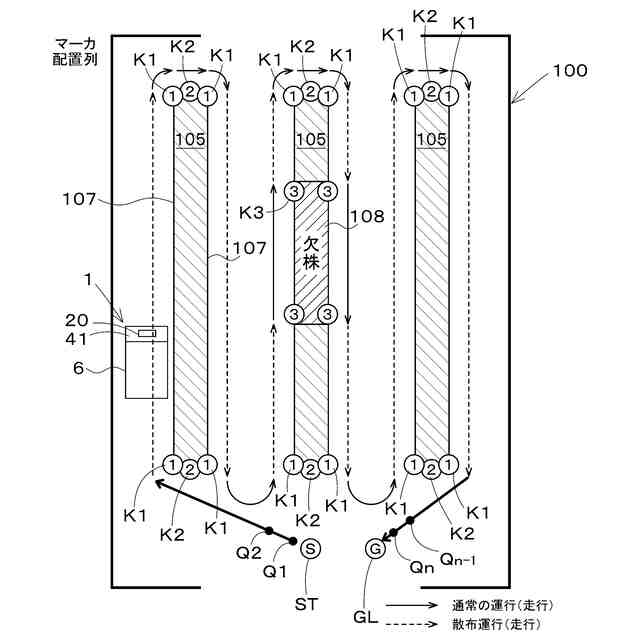
【解決手段】農業用ロボット1は、移動可能な機体6と、機体6に設けられ、対象領域105に配置された識別部材(マーカK)を認識する認識部20と、機体6に設けられ、認識部20にて識別部材Kを認識した回数又はパターンに基づいて、機体6を対象領域105に対して動作させる制御部41と、を備える。
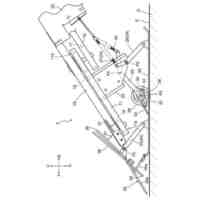
【選択図】図5A
特許請求の範囲
【請求項1】
移動可能な機体と、
前記機体に設けられ、対象領域に配置された識別部材を認識する認識部と、
前記機体に設けられ、前記認識部にて前記識別部材を認識した回数又はパターンに基づいて、当該機体を前記対象領域に対して動作させる制御部と、
を備える農業用ロボット。
続きを表示(約 1,700 文字)
【請求項2】
前記制御部は、前記認識部にて前記識別部材を認識した回数又はパターンに基づいて、前記機体の移動及び作業の少なくとも一方を含む動作内容を決定し、決定結果が示す前記動作内容で当該機体を動作させる請求項1に記載の農業用ロボット。
【請求項3】
前記識別部材は、旋回動作を示す場合には、前記対象領域の少なくとも一部又は全部のコーナ部に配置され、
前記制御部は、前記認識部にて前記識別部材が認識された場合に、前記対象領域における前記識別部材の認識回数が所定範囲内であるか否かを判別し、判別結果に基づき、前記対象領域の前記コーナ部に対する前記機体の旋回移動の制御を行う請求項2に記載の農業用ロボット。
【請求項4】
前記制御部は、前記認識部にて前記識別部材が認識された場合に、前記認識回数が、前記所定範囲外の規定回数に到達しているか否かを判別し、当該判別結果に基づき、前記機体を目的の対象領域に向かわせる方向転換移動の制御を行う請求項3に記載の農業用ロボット。
【請求項5】
前記方向転換移動は、当該対象領域に対して間隔を空けて並設され、且つ、前記規定回数の前記識別部材に最も近い次の対象領域に、前記機体を向かわせるUターン、前記機体を切り返して前記最も近い次の対象領域に向かわせる切り返しターン、及び、前記最も近い次の対象領域を飛ばして当該対象領域から2番目に近い対象領域に前記機体を向かわせる1つ飛ばしターンを含み、
前記制御部は、前記認識部にて前記識別部材が認識された場合に、前記認識回数が、前記規定回数としての第1規定回数、第2規定回数及び第3規定回数の何れかに到達しているか否かを判別し、当該判別結果に基づき、前記機体を前記Uターン、前記切り返しターン、及び、前記1つ飛ばしターンの何れかの制御を行う請求項4に記載の農業用ロボット。
【請求項6】
前記認識部は、撮像部と、前記撮像部にて撮像された撮像画像を画像解析することにより当該撮像画像に含まれる前記識別部材を認識する画像認識部と、を備え、
前記制御部は、前記撮像画像に基づいて前記機体と前記識別部材との位置を判定し、前記認識回数と当該位置の判定との両方に基づいて、前記対象領域の前記コーナ部に対する前記機体の旋回移動の制御を行う請求項3に記載の農業用ロボット。
【請求項7】
前記制御部は、前記位置の判定が、前記撮像画像に基づいて前記識別部材が前記機体の後方に位置するとの判定である場合に、前記対象領域の前記コーナ部に対する前記機体の旋回移動の制御を行う請求項6に記載の農業用ロボット。
【請求項8】
前記識別部材は第1識別部材であり、
前記対象領域は平面視で矩形状であり、一対の長手辺と一対の短手辺とを有し、当該一対の短手辺には、前記第1識別部材とは異なる第2識別部材が配置され、
前記制御部は、前記対象領域の前記コーナ部に対する前記機体の旋回移動の制御を行い、前記位置の判定が、前記撮像画像に基づいて前記短手辺の前記第2識別部材が前記機体の前方に位置するとの判定である場合に、前記機体の前記短手辺に沿う直進移動の制御を行う請求項7に記載の農業用ロボット。
【請求項9】
前記識別部材は、旋回動作を示す場合には、前記対象領域の少なくとも一部又は全部のコーナ部に配置され、
前記制御部は、前記対象領域において前記認識部にて前記識別部材を認識したパターンが特定パターンであるか否かを判別し、当該判別結果に基づき、前記対象領域の前記コーナ部に対する前記機体の旋回移動の制御を行う請求項2に記載の農業用ロボット。
【請求項10】
前記制御部は、前記対象領域において前記認識部にて前記識別部材を認識したパターンが規定パターンであるか否かを判別し、当該判別結果に基づき、前記機体を目的の対象領域に向かわせる方向転換移動の制御を行う請求項9に記載の農業用ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、農業用ロボットおよびプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、GNSS(全世界測位システム)を用いて自律走行を行う農用作業車が記載されている。特許文献2には、鳥瞰画像を作成し、鳥瞰画像から作物列を認識して自律走行を行う作業車両が記載されている。非特許文献1には、予めマーカに動作を割り当てておき、認識したマーカが示す動作を行うことで自律走行を行うロボットが記載されている。特許文献3には、予めマーカに位置情報を割り当てておき、認識したマーカから位置情報を取得して自律走行を行う自走型の画像形成装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2008-92818号公報
特許第6735303号公報
特開2006-321583号公報
【非特許文献】
【0004】
和田 有紗 他2名、「ARマーカを用いた経路選択を行うための自律走行制御の検討」、[ON LINE]、情報処理学会第81回全国大会、[令和5年2月28日検索]、インターネット<URL: https://ipsj.ixsq.nii.ac.jp/ej/?action=repository#uri&item#id=196167&file#id=1&file#no=1>
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、ハウスなどの施設内においてGNSSによる衛星測位信号を好適に受信できないことがあり、施設内の畝などの対象領域に沿わせるなどの自律走行ができない場合がある。特許文献2では、鳥瞰画像の作成、鳥瞰画像からの作物列の認識などの処理が必要であるため、これらの処理が煩雑である。非特許文献1では、作業内容又は走行ルートを変更する場合に、複数のマーカの設置位置をその都度変更する必要があり、手間がかかる。特許文献3では、十分な精度で自律走行させるためには膨大な数及び種類のマーカが必要であり、非常に手間がかかる。
【0006】
本発明は、施設内において対象領域に応じた動作を好適に行うことができる農業用ロボットおよびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
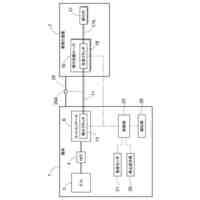
農業用ロボットは、移動可能な機体と、前記機体に設けられ、対象領域に配置された識別部材を認識する認識部と、前記機体に設けられ、前記認識部にて前記識別部材を認識した回数又はパターンに基づいて、当該機体を前記対象領域に対して動作させる制御部と、を備える。
【0008】
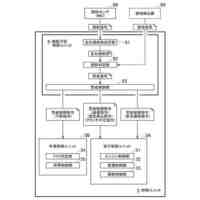
前記制御部は、前記認識部にて前記識別部材を認識した回数又はパターンに基づいて、前記機体の移動及び作業の少なくとも一方を含む動作内容を決定し、決定結果が示す前記動作内容で当該機体を動作させてもよい。
【0009】
前記識別部材は、旋回動作を示す場合には、前記対象領域の少なくとも一部又は全部のコーナ部に配置され、前記制御部は、前記認識部にて前記識別部材が認識された場合に、前記対象領域における前記識別部材の認識回数が所定範囲内であるか否かを判別し、判別結果に基づき、前記対象領域の前記コーナ部に対する前記機体の旋回移動の制御を行ってもよい。
【0010】
前記制御部は、前記認識部にて前記識別部材が認識された場合に、前記認識回数が、前記所定範囲外の規定回数に到達しているか否かを判別し、当該判別結果に基づき、前記機体を目的の対象領域に向かわせる方向転換移動の制御を行ってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
桝蓋
22日前
株式会社クボタケミックス
多層管
8日前
株式会社クボタ
収穫機
22日前
株式会社クボタ
収穫機
22日前
株式会社クボタ
収穫機
22日前
株式会社クボタ
収穫機
22日前
株式会社クボタ
作業車
8日前
株式会社クボタケミックス
取付部材
16日前
株式会社クボタ
圃場作業機
22日前
株式会社クボタ
膜分離装置
9日前
株式会社クボタ
水田作業車
15日前
株式会社クボタ
水田作業車
15日前
株式会社クボタ
水分量測定装置
28日前
株式会社クボタ
水分量測定装置
28日前
株式会社クボタケミックス
更生管案内装置
1か月前
株式会社クボタ
弁箱用の消失模型
17日前
株式会社クボタ
独立型水利用システム
22日前
株式会社クボタケミックス
止水方法及び止水構造
1か月前
株式会社クボタ
排気ガス再循環装置およびエンジン
17日前
株式会社クボタ
排気ガス再循環装置およびエンジン
17日前
株式会社クボタ
エンジン制御装置およびエンジン装置
1か月前
株式会社クボタ
作業車両、および作業車両の制御方法
23日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
10日前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
9日前
株式会社クボタ
位置調整治具及び対象機器の位置調整方法
15日前
株式会社クボタ
トラクタ
8日前
株式会社クボタ
注入率算出システム、水処理システム、および注入率算出方法
28日前
株式会社クボタケミックス
排水配管継手
29日前
株式会社クボタ
電力変換装置
29日前
株式会社クボタケミックス
脚部ベンド用のアダプタ、脚部ベンド、および、排水配管構造
22日前
株式会社クボタ
自動走行制御システム
21日前
株式会社クボタ
フロントガード及び作業車両
1か月前
株式会社クボタ
学習モデル生成装置およびシステム
1か月前
株式会社クボタケミックス
排水集合管および排水集合管の製造方法
10日前
有限会社シーム
誘引紐支持具
28日前
個人
草抜き機
22日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ