TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024174038
公報種別
公開特許公報(A)
公開日
2024-12-13
出願番号
2024166592,2021205488
出願日
2024-09-25,2021-12-17
発明の名称
自動走行制御システム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
G05D
1/43 20240101AFI20241206BHJP(制御;調整)
要約
【課題】目標走行経路に沿った自動走行を精度良く行うことを目的とする。
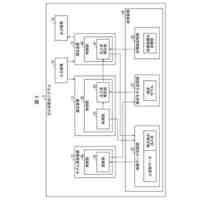
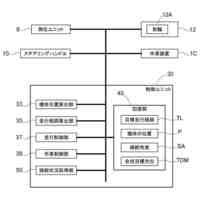
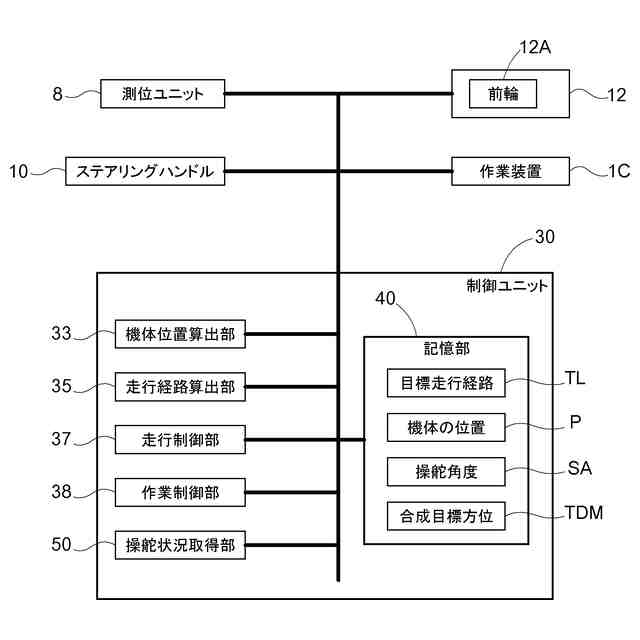
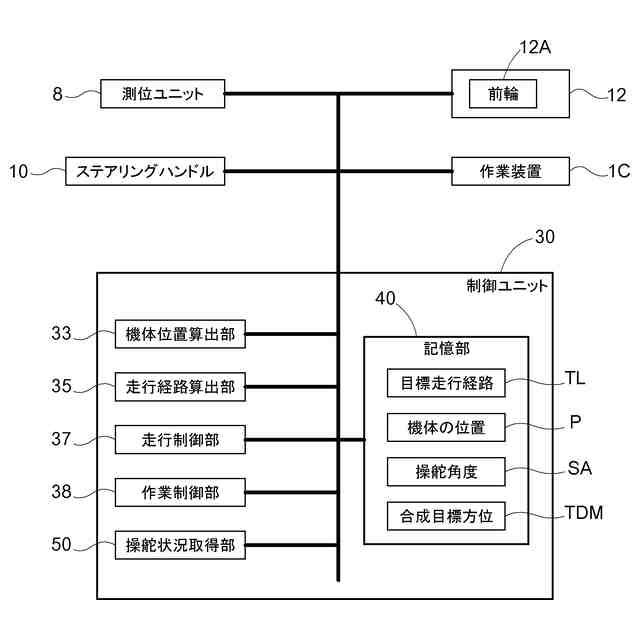
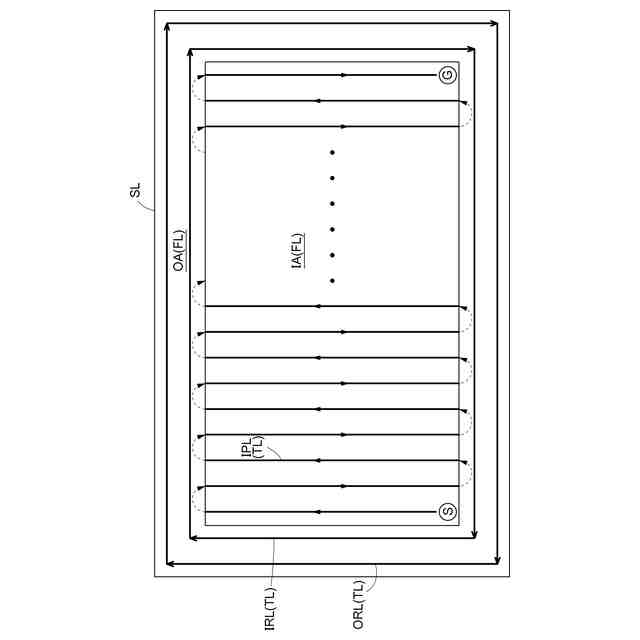
【解決手段】目標走行経路TLに沿って自動走行を行う作業車の自動走行制御システムであって、作業車が手動走行した際の手動走行状況を取得する状況取得部50と、少なくとも機体の位置Pおよび走行方位に基づいて目標走行経路TLに沿って作業車が走行するように自動走行制御を行う走行制御部37とを備え、走行経路算出部35が生成する目標走行経路TLは、作業車があらかじめ手動走行した走行軌跡に基づいて生成された既走走行経路を含み、走行制御部37は、既走走行経路に沿って走行する際には、機体の位置Pに加えて前記手動走行状況に基づいて走行を制御する操舵考慮モードを有する。
【選択図】図2
特許請求の範囲
【請求項1】
目標走行経路に沿って自動走行を行う作業車の自動走行制御システムであって、
前記作業車の機体の位置および走行方位を算出する機体位置算出部と、
前記作業車が手動走行した際の手動走行状況を取得する状況取得部と、
取得された前記手動走行状況を記憶する記憶部と、
前記目標走行経路を生成する走行経路算出部と、
少なくとも前記機体の位置および前記走行方位に基づいて前記目標走行経路に沿って前記作業車が走行するように自動走行制御を行う走行制御部とを備え、
前記走行経路算出部が生成する前記目標走行経路は、前記作業車があらかじめ前記手動走行した走行軌跡に基づいて生成された既走走行経路を含み、
前記走行制御部は、前記既走走行経路に沿って走行する際には、前記機体の位置に加えて前記手動走行状況に基づいて走行を制御する自動走行制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記手動走行状況は、前記手動走行した際の、操舵状況、車輪状況、および機体方位状況の少なくとも何れかを含み、
前記操舵状況は前記作業車に対する操向操作を受け付けるステアリングハンドルの操作角度であり、前記車輪状況は前記作業車が有する前輪の切れ角であり、前記機体方位状況は前記走行軌跡における前記機体の進行方向の変化である請求項1に記載の自動走行制御システム。
【請求項3】
前記走行制御部は、前記既走走行経路に沿って前記機体の進行方向を変更する際に、前記機体の位置に加えて前記手動走行状況に基づいて走行を制御する前記自動走行制御を行う請求項1または2に記載の自動走行制御システム。
【請求項4】
前記走行制御部は、前記進行方向の変更の開始位置の前後の前記経路要素のなす角度が所定の角度以上である場合に、前記機体の位置に加えて前記手動走行状況に基づいて走行を制御する前記自動走行制御を行う請求項3に記載の自動走行制御システム。
【請求項5】
前記走行制御部は、前記進行方向の変更の開始位置の前後の前記経路要素における前記目標方位のなす角度が所定の角度以上である場合に、前記機体の位置に加えて前記手動走行状況に基づいて走行を制御する前記自動走行制御を行う請求項3に記載の自動走行制御システム。
【請求項6】
前記走行制御部は、前記機体の位置に加えて前記手動走行状況に基づいて走行を制御する前記自動走行制御を行う際に、前記目標走行経路に沿った前記進行方向の変更の開始位置よりも手前から前記自動走行制御が開始されるように制御する請求項3から5のいずれか一項に記載の自動走行制御システム。
【請求項7】
前記手動走行状況は、前記手動走行した際の、操舵状況、車輪状況、および機体方位状況の少なくとも何れかを含み、
前記走行制御部は、前記機体の位置に加えて前記手動走行状況に基づいて走行を制御する前記自動走行制御を行う際に、前記操舵状況、前記車輪状況、および前記機体方位状況の少なくともいずれかに基づいて前記目標走行経路を補正する請求項3から5のいずれか一項に記載の自動走行制御システム。
【請求項8】
前記走行経路算出部は、前記走行軌跡のうちの、前記進行方向の変更の際の前進走行中の前進走行軌跡および後進走行中の進走行軌跡から、前記目標走行経路として方向変更経路を生成し、
前記走行制御部は、前記進行方向の変更の際には、前記方向変更経路に沿って前記作業車が走行するように前記自動走行制御を行う請求項3から7のいずれか一項に記載の自動走行制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目標走行経路に沿って自動走行を行う作業車の自動走行を制御する自動走行制御システムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
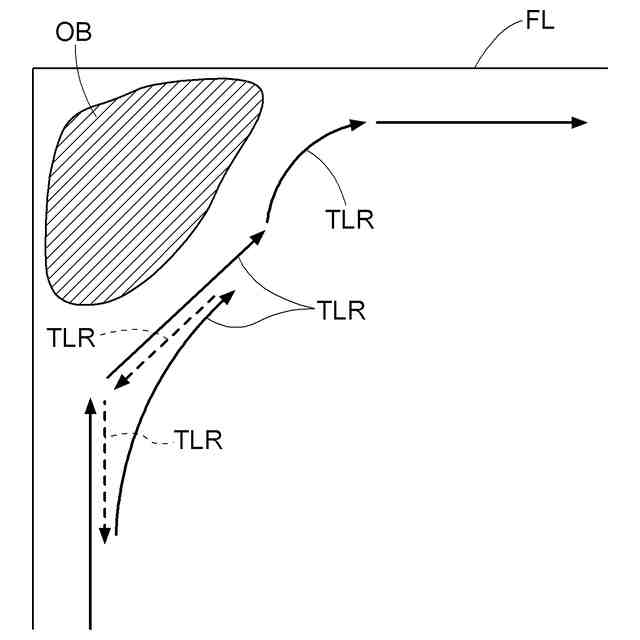
特許文献1に開示されるように、田植機等の作業車は圃場に生成された目標走行経路に沿って自動走行しながら作業を行う。ここで、目標走行経路は屈曲する箇所を含み、作業車は屈曲箇所で進行方向変更を行う。進行方向変更は、作業車が屈曲箇所(進行方向変更の開始位置)に到達すると目標走行経路に沿って走行するように、自動操舵制御が行われる。
【先行技術文献】
【特許文献】
【0003】
特開2021-108611号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、急激に屈曲する箇所では、自動操舵制御が困難な場合があり、作業車が目標走行経路から外れ、適切に自動走行できない場合があった。
【0005】
本発明は、目標走行経路に沿った自動走行を精度良く行うことを目的とする。
【課題を解決するための手段】
【0006】
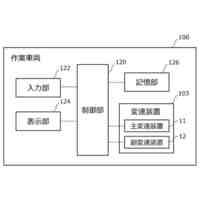
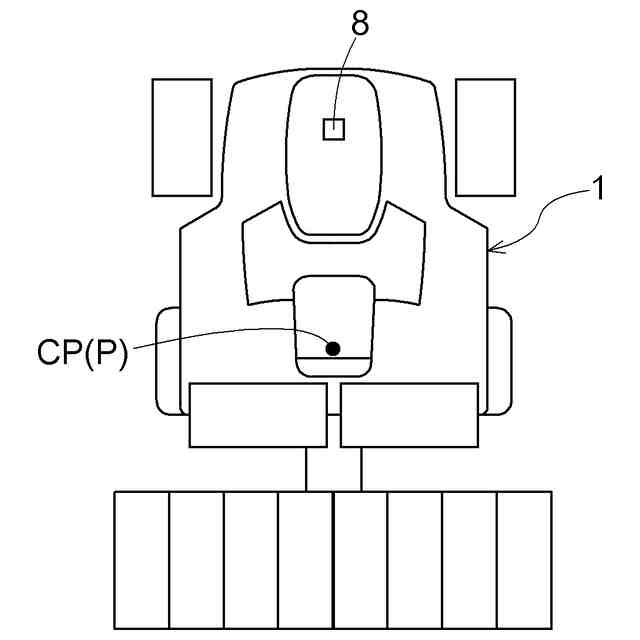
本発明の一実施形態に係る自動走行制御システムは、目標走行経路に沿って自動走行を行う作業車の自動走行制御システムであって、前記作業車の機体の位置および走行方位を算出する機体位置算出部と、前記作業車が手動走行した際の手動走行状況を取得する状況取得部と、取得された前記手動走行状況を記憶する記憶部と、前記目標走行経路を生成する走行経路算出部と、少なくとも前記機体の位置および前記走行方位に基づいて前記目標走行経路に沿って前記作業車が走行するように自動走行制御を行う走行制御部とを備え、前記走行経路算出部が生成する前記目標走行経路は、前記作業車があらかじめ前記手動走行した走行軌跡に基づいて生成された既走走行経路を含み、前記走行制御部は、前記既走走行経路に沿って走行する際には、前記機体の位置に加えて前記手動走行状況に基づいて走行を制御する。
また、上記目的を達成するために、本発明の一実施形態に係る自動走行制御システムは、目標走行経路に沿って自動走行を行う作業車の自動走行制御システムであって、前記作業車の機体の位置および走行方位を算出する機体位置算出部と、前記作業車が手動走行した際の、操舵状況、車輪状況、および機体方位状況の少なくともいずれかを取得する状況取得部と、取得された前記操舵状況、前記車輪状況、および前記機体方位状況の少なくともいずれかを記憶する記憶部と、複数の経路要素とそれぞれの前記経路要素における前記機体の進行方向を示す目標方位とを含む前記目標走行経路を生成する走行経路算出部と、少なくとも前記機体の位置および前記走行方位に基づいて前記目標走行経路に沿って前記作業車が走行するように自動走行制御を行う走行制御部とを備え、前記走行経路算出部が生成する前記目標走行経路は、前記作業車があらかじめ前記手動走行した走行軌跡に基づいて生成された既走走行経路を含み、前記走行制御部は、前記既走走行経路に沿って走行する際には、前記機体の位置に加えて前記操舵状況、前記車輪状況、および前記機体方位状況の少なくともいずれかを考慮して走行を制御する操舵考慮モードを有する。
【0007】
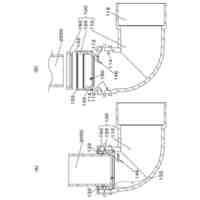
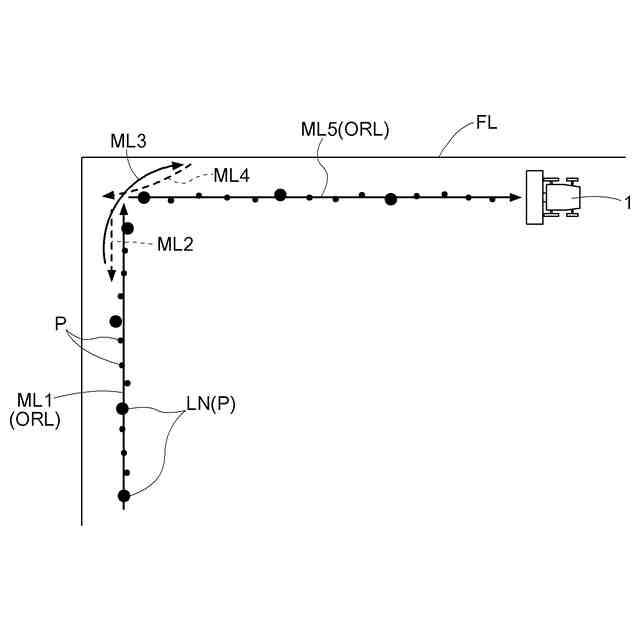
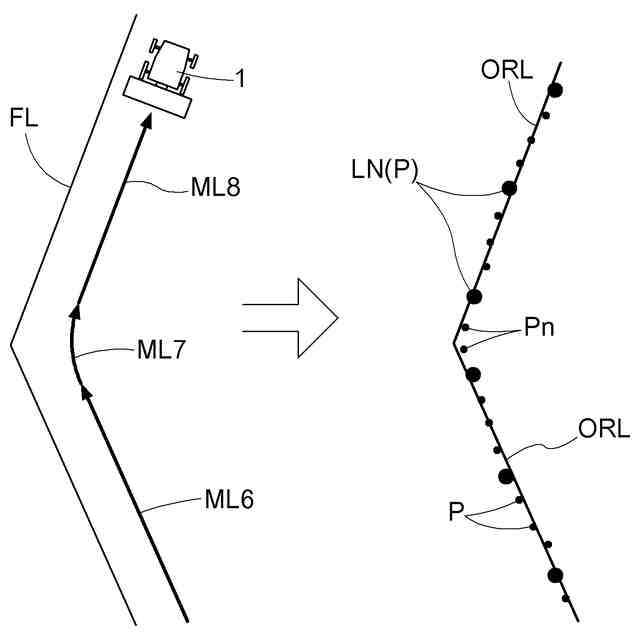
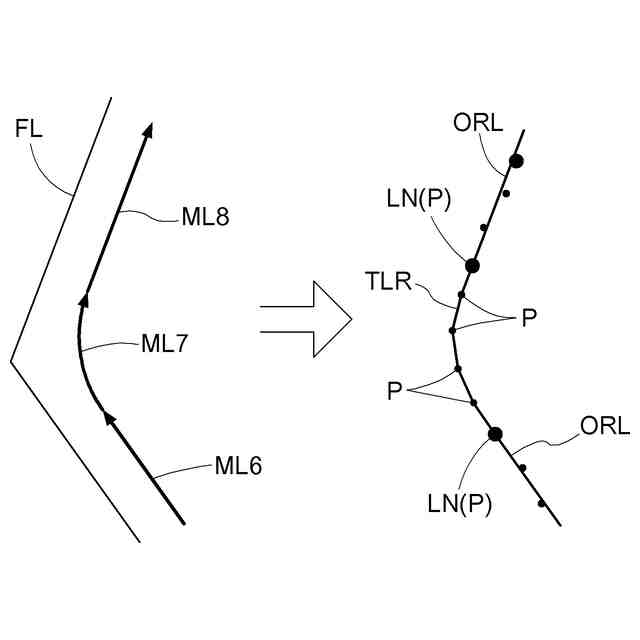
既走走行経路は、走行軌跡の近似直線として生成される。そのため、進行方向変更箇所は直線状の経路要素(既走走行経路)の交点となり、急激な進行方向変更が必要となる場合が生じ、経路要素に沿って進行方向変更を行うことが困難な場合がある。つまり、手動走行における進行方向変更の軌跡より経路要素が外側に位置し、経路要素に沿って走行すると、進行方向変更が遅れる場合がある。
【0008】
進行方向変更に際して手動走行の際の操舵状況、車輪状況、および機体方位状況の少なくともいずれかを考慮することにより、急激に進行方向変更される経路であっても、進行方向変更が遅れることが抑制され、精度良く目標走行経路に沿った自動走行を行うことが可能となる。
【0009】
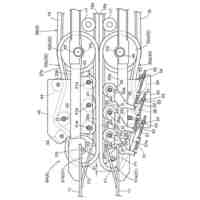
また、前記操舵状況は前記作業車に対する操向操作を受け付けるステアリングハンドルの操作角度であり、前記車輪状況は前記作業車が有する前輪の切れ角であり、前記機体方位状況は前記走行軌跡における前記機体の進行方向の変化であっても良い。
【0010】
手動走行の操向操作を行うステアリングハンドル10の操作角度、前輪の切れ角、および、走行軌跡における機体の進行方向の変化の少なくともいずれかを考慮することにより、手動走行に沿った位置で進行方向変更を開始することができ、進行方向変更が遅れることが抑制され、精度良く目標走行経路に沿った自動走行を行うことが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタケミックス
桝蓋
1日前
株式会社クボタ
収穫機
1日前
株式会社クボタ
収穫機
1日前
株式会社クボタ
収穫機
1日前
株式会社クボタ
収穫機
1日前
株式会社クボタ
圃場作業機
1日前
株式会社クボタ
水分量測定装置
7日前
株式会社クボタ
水分量測定装置
7日前
株式会社クボタ
独立型水利用システム
1日前
株式会社クボタ
作業車両、および作業車両の制御方法
2日前
株式会社クボタケミックス
排水配管継手
8日前
株式会社クボタケミックス
脚部ベンド用のアダプタ、脚部ベンド、および、排水配管構造
1日前
株式会社クボタ
注入率算出システム、水処理システム、および注入率算出方法
7日前
株式会社クボタ
電力変換装置
8日前
株式会社クボタ
自動走行制御システム
今日
株式会社クボタ
学習モデル生成装置およびシステム
10日前
有限会社シーム
誘引紐支持具
7日前
個人
方向検出器
22日前
積水樹脂株式会社
磁性シート
1か月前
ugo株式会社
移動体
22日前
個人
車両レバー操作装置
1か月前
神港テクノス株式会社
制御装置
8日前
株式会社ダイヘン
移動体
8日前
株式会社ダイヘン
移動体
8日前
トヨタ自動車株式会社
自律移動体
21日前
エイブリック株式会社
基準電圧回路装置
1か月前
トヨタ自動車株式会社
搬送ロボット
1か月前
トヨタ自動車株式会社
搬送システム
1か月前
トヨタ自動車株式会社
配送システム
1日前
株式会社フジキン
流体制御装置
2日前
株式会社ダイフク
搬送設備
14日前
トヨタ自動車株式会社
位置推定システム
21日前
トヨタ自動車株式会社
ロボットシステム
1か月前
トヨタ自動車株式会社
自律移動システム
21日前
株式会社FUJI
工作機械の操作システム
28日前
株式会社栗本鐵工所
操作装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ