TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024140856
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023052202
出願日
2023-03-28
発明の名称
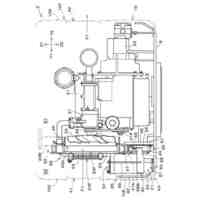
農業用ロボット
出願人
株式会社クボタ
,
株式会社レグミン
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20241003BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】施設内において対象領域外で好適に自律移動を行うことができる農業用ロボットを提供する。
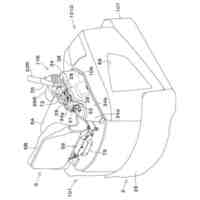
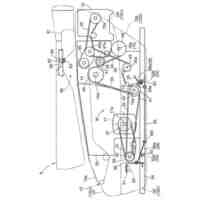
【解決手段】農業用ロボット1は、移動可能な機体6と、機体6に設けられ、対象領域105の外周を非接触で検出する検出部(ライダー31)と、ライダー31にて検出された外周の方向を特定する方向特定部42aと、方向特定部42aにて特定された外周の方向と、機体6の方向との関係に基づいて、対象領域105外における機体6の移動動作を制御する制御部41と、を備える。
【選択図】図11
特許請求の範囲
【請求項1】
移動可能な機体と、
前記機体に設けられ、対象領域の外周を非接触で検出する検出部と、
前記検出部にて検出された前記外周の方向を特定する方向特定部と、
前記方向特定部にて特定された前記外周の方向と、前記機体の方向との関係に基づいて、前記対象領域外における当該機体の移動動作を制御する制御部と、
を備える農業用ロボット。
続きを表示(約 1,500 文字)
【請求項2】
前記対象領域は、平面視で外形が多角形であり、
前記制御部は、前記方向特定部にて特定された前記外周の方向を示す延長線と前記機体の前後方向を示す前後線との交点と、前記機体の旋回基準点との位置関係に基づいて、前記機体の移動動作を制御する請求項1に記載の農業用ロボット。
【請求項3】
前記制御部は、前記延長線と前記前後線としての前記機体の横幅中央に位置する中央線との交点と、前記旋回基準点としての前記機体の中心点との位置関係に基づいて、前記機体の移動動作を制御する請求項2に記載の農業用ロボット。
【請求項4】
前記機体は、鉛直軸に対して、ピボットターン又はスピンターン可能な構成であり、
前記制御部は、前記延長線と前記前後線としての前記機体の横幅で旋回内側に位置する旋回内側の前後線との交点と、前記旋回基準点としての前記機体の前記旋回内側の前後線上の旋回の中心点との位置関係に基づいて、前記機体の移動動作を制御する請求項2に記載の農業用ロボット。
【請求項5】
前記制御部は、前記交点が前記旋回基準点よりも前にある場合、前記機体の直進移動の制御を維持し、前記交点が前記旋回基準点よりも前にない場合、前記機体の前記対象領域のコーナ部に沿う旋回移動の制御を行う第1制御処理を実行する請求項2~4の何れか1項に記載の農業用ロボット。
【請求項6】
前記制御部は、前記検出部にて検出された前記外周の所定方向と前記機体の前後方向とがなす角度が閾値未満であれば、前記外周と平行に前記機体を直進移動させる制御を維持し、前記角度が前記閾値以上であると、前記第1制御処理を実行する請求項5に記載の農業用ロボット。
【請求項7】
前記外周は、波板状の壁部材、連続した円柱又は円柱台が配置されることによって凹凸を有する波形である場合、前記制御部は、前記検出部にて検出された前記波形の外周を、この波形のうちの複数の凸値で構成される外周、複数の凹値で構成される外周、又は、複数の凹凸間の所定値で構成される外周に変換し、変換された外周の方向を示す延長線と前記機体の前記前後線との交点と、前記旋回基準点との位置関係に基づいて、前記機体の移動動作を制御する請求項2~4の何れか1項に記載の農業用ロボット。
【請求項8】
前記機体は、作業装置を備え、
前記制御部は、前記機体を直進移動させる場合に前記作業装置による作業を実行させ、前記機体を前記対象領域のコーナ部に沿う旋回移動させる場合に前記作業装置による作業を実行させない請求項6に記載の農業用ロボット。
【請求項9】
2つの前記対象領域が前記機体の進行方向に間隔を空けて並んでおり、
前記制御部は、前記2つの対象領域を示す2つの前記外周が前記機体の進行方向に前記間隔を空けて並んでいることが前記検出部にて検出された場合、前記間隔が規定間隔以下であれば、前記外周と平行に前記機体を直進移動させる制御を維持し、前記間隔が前記規定間隔を超えていれば、前記第1制御処理を実行する請求項6に記載の農業用ロボット。
【請求項10】
前記機体は、作業装置を備え、
前記制御部は、前記対象領域に対して前記機体を直進移動させる場合に前記作業装置による作業を実行させ、前記2つの対象領域のうちの一方から他方への前記機体の移動中の場合及び前記機体を前記対象領域のコーナ部に沿う旋回移動させる場合に前記作業装置による作業を実行させない請求項9に記載の農業用ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、農業用ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、GNSS(全世界測位システム)を用いて自律走行を行う農用作業車が記載されている。特許文献2には、経路上に設置された複数の磁気マーカを辿って走行する自律走行車が記載されている。特許文献3には、SLAM(Simultaneous Localization and Mapping)を用いて自律走行する掃除機が記載されている。SLAMとは、移動体の自己位置推定と環境地図作成を同時に行う技術のことである。
【先行技術文献】
【特許文献】
【0003】
特開2008-92818号公報
特許第6342781号公報
特開2022-83504号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、ハウスなどの施設内においてGNSSによる衛星測位信号を好適に受信できないことがあり、施設内の畝などの対象領域に沿わせるなどの自律走行ができない場合がある。特許文献2では、壁面などの物体近傍を走行する必要がある場合、走行時に機体が物体に接触しないようにマーカの設置位置を調整することに手間がかかること、マーカずれに起因する意図しない走行軌跡の変化が生じることがある。特許文献3では、自己位置推定と環境地図作成の同時実行を行うため、処理負担が増大し、高コスト化するという問題がある。
【0005】
本発明は、施設内において対象領域外で好適に自律移動を行うことができる農業用ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
農業用ロボットは、移動可能な機体と、前記機体に設けられ、対象領域の外周を非接触で検出する検出部と、前記検出部にて検出された前記外周の方向を特定する方向特定部と、前記方向特定部にて特定された前記外周の方向と、前記機体の方向との関係に基づいて、前記対象領域外における当該機体の移動動作を制御する制御部と、を備える。
【0007】
前記対象領域は、平面視で外形が多角形であり、前記制御部は、前記方向特定部にて特定された前記外周の方向を示す延長線と前記機体の前後方向を示す前後線との交点と、前記機体の旋回基準点との位置関係に基づいて、前記機体の移動動作を制御してもよい。
【0008】
前記制御部は、前記延長線と前記前後線としての前記機体の横幅中央に位置する中央線との交点と、前記旋回基準点としての前記機体の中心点との位置関係に基づいて、前記機体の移動動作を制御してもよい。
【0009】
前記機体は、鉛直軸に対して、ピボットターン又はスピンターン可能な構成であり、前記制御部は、前記延長線と前記前後線としての前記機体の横幅で旋回内側に位置する旋回内側の前後線との交点と、前記旋回基準点としての前記機体の前記旋回内側の前後線上の旋回の中心点との位置関係に基づいて、前記機体の移動動作を制御してもよい。
【0010】
前記制御部は、前記交点が前記旋回基準点よりも前にある場合、前記機体の直進移動の制御を維持し、前記交点が前記旋回基準点よりも前にない場合、前記機体の前記対象領域のコーナ部に沿う旋回移動の制御を行う第1制御処理を実行してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
24日前
株式会社クボタ
作業車
24日前
株式会社クボタ
作業車
24日前
株式会社クボタ
作業機
1か月前
株式会社クボタケミックス
管継手
17日前
株式会社クボタケミックス
弁装置
25日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
25日前
株式会社クボタ
作業機
11日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
24日前
株式会社クボタ
作業車両
3日前
株式会社クボタ
作業車両
17日前
株式会社クボタ
作業車両
3日前
株式会社クボタ
作業車両
3日前
株式会社クボタ
作業車両
28日前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
コンバイン
1か月前
株式会社クボタ
コンバイン
1か月前
株式会社クボタ
電動作業車
25日前
株式会社クボタ
水処理設備
12日前
株式会社クボタ
電動作業車
1か月前
株式会社クボタ
竪型の反応炉
18日前
株式会社クボタケミックス
電気融着継手
12日前
株式会社クボタ
竪型の反応炉
18日前
株式会社クボタ
吸気マニホルド
1か月前
株式会社クボタ
農業支援システム
1か月前
株式会社クボタ
クローラ走行装置
28日前
株式会社クボタ
有機物堆肥化装置
11日前
株式会社クボタ
エンジンの検油装置
1か月前
株式会社クボタ
排気ガス浄化システム
24日前
株式会社クボタ
排気ガス浄化システム
24日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ