TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024085799
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022200537
出願日
2022-12-15
発明の名称
作業車及び作業車を制御するシステム
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
G05D
1/43 20240101AFI20240620BHJP(制御;調整)
要約
【課題】作業車の収穫作業の効率を高めること。
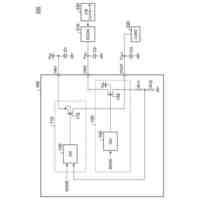
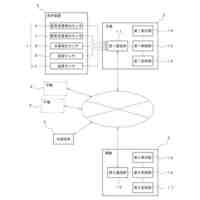
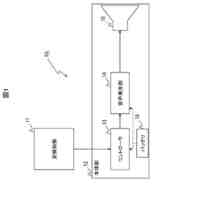
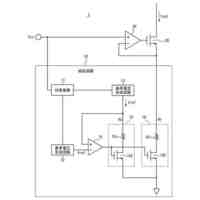
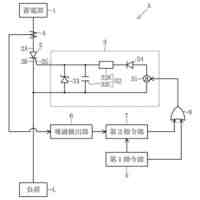
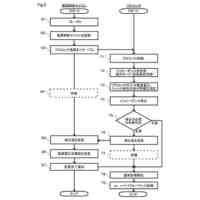
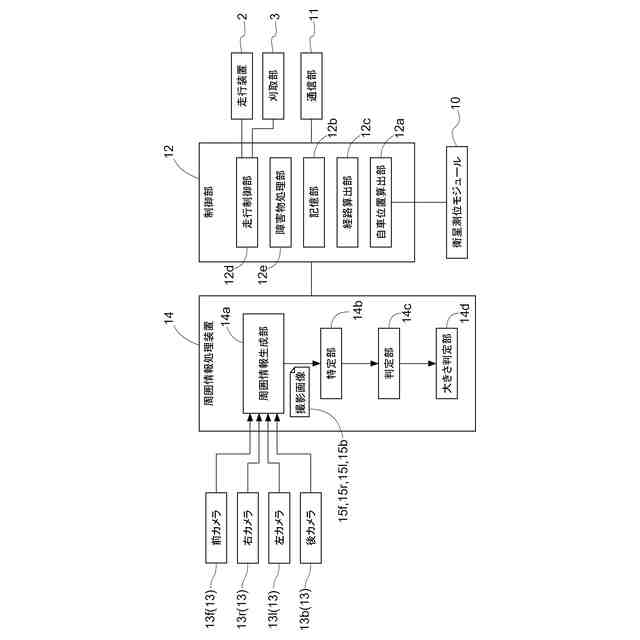
【解決手段】機体を備えた作業車を制御するシステムは、機体の周囲を検知する複数のセンサ13と、1つのセンサ13の出力信号に基づいて機体の周囲の状況を示す周囲情報15を生成する周囲情報生成部14aと、周囲情報において不感領域を特定する特定部14bと、不感領域の全体が他のセンサによって補完可能な補完領域の内部に位置しているか否かを判定する判定部14cと、機体の自動走行を制御する制御部12と、を備え、補完領域の内部に位置していると判定部14cが判定したときに制御部12は機体の自動走行を継続し、補完領域の内部に位置していないと判定部14cが判定したときに制御部12は機体の自動走行を停止する。
【選択図】図3
特許請求の範囲
【請求項1】
機体を備えた作業車を制御するシステムであって、
前記機体の周囲を検知する複数のセンサと、
1つの前記センサの出力信号に基づいて前記機体の周囲の状況を示す周囲情報を生成する周囲情報生成部と、
前記周囲情報において不感領域を特定する特定部と、
前記不感領域の全体が他の前記センサによって補完可能な補完領域の内部に位置しているか否かを判定する判定部と、
前記機体の自動走行を制御する制御部と、を備え、
前記補完領域の内部に位置していると前記判定部が判定したときに前記制御部は前記機体の自動走行を継続し、
前記補完領域の内部に位置していないと前記判定部が判定したときに前記制御部は前記機体の自動走行を停止するシステム。
続きを表示(約 900 文字)
【請求項2】
前記補完領域の内部に位置していないと前記判定部が判定したときに、前記制御部は圃場の端部で前記機体の自動走行を停止する請求項1に記載のシステム。
【請求項3】
前記センサは、カメラであり、
前記周囲情報生成部は、1つの前記カメラの出力信号に基づいて前記機体の周囲の状況を示す画像である前記周囲情報を生成する請求項1に記載のシステム。
【請求項4】
前記カメラとしての、第1カメラと、前記第1カメラと隣接する第2カメラと、を備え、
前記周囲情報は、前記第1カメラの出力信号に基づいて生成された第1周囲情報と、前記第2カメラの出力信号に基づいて生成された第2周囲情報と、を含んでおり、
前記第1周囲情報及び前記第2周囲情報において、前記特定部が前記不感領域を特定したときに、前記制御部は前記機体の自動走行を停止するように制御する請求項3に記載のシステム。
【請求項5】
前記不感領域の大きさが所定の閾値以下であるか否かを判定する大きさ判定部を更に備え、
前記補完領域の内部に位置していないと前記判定部が判定し、かつ、前記閾値以下であると前記大きさ判定部が判定したときに、前記制御部は前記機体の自動走行を継続する請求項1に記載のシステム。
【請求項6】
機体と、
前記機体の周囲を検知する複数のセンサと、
1つの前記センサの出力信号に基づいて前記機体の周囲の状況を示す周囲情報を生成する周囲情報生成部と、
前記周囲情報において不感領域を特定する特定部と、
前記不感領域の全体が他の前記センサによって補完可能な補完領域の内部に位置しているか否かを判定する判定部と、
前記機体の自動走行を制御する制御部と、を備え、
前記補完領域の内部に位置していると前記判定部が判定したときに前記制御部は前記機体の自動走行を継続し、
前記補完領域の内部に位置していないと前記判定部が判定したときに前記制御部は前記機体の自動走行を停止する作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車及び作業車を制御するシステムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、LiDARセンサを備えるアクティブセンサと、撮像装置と、を備えている作業車両が開示されている。この作業車両は、アクティブセンサのセンサ表面に汚れなどの異常が生じた場合には、撮像装置と接続された画像処理装置によって作業車両の周囲の情報を検知することができる。
【先行技術文献】
【特許文献】
【0003】
特開2022-69671号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
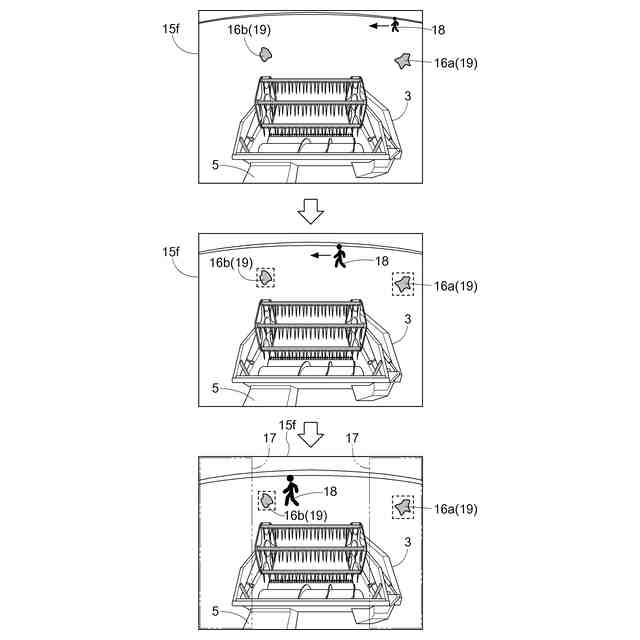
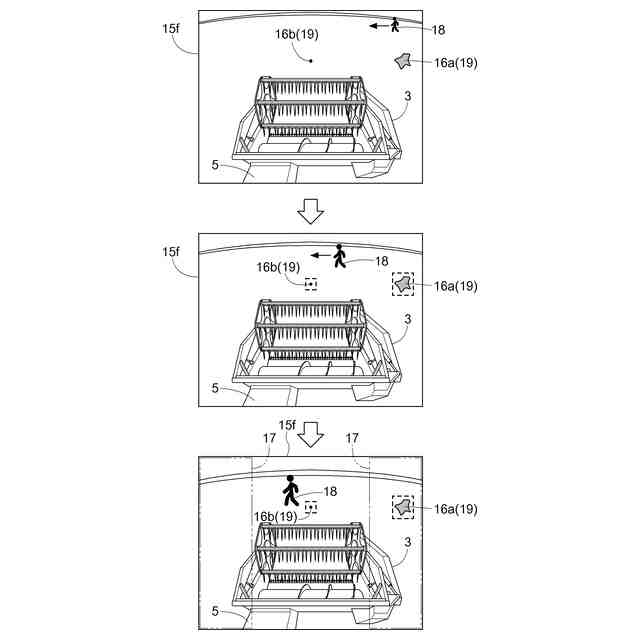
センサの表面に汚れなどの異常が生じると、センサの出力に基づいて生成された周囲情報において不感領域が現れる。不感領域が現れると機体の自動走行に支障が生じる場合があるため、自動走行を停止する方が好ましい。しかしながら、不感領域が現れても不感領域の位置や大きさによっては機体の自動走行に支障がない場合がある。この場合でも自動走行を停止すると収穫作業の効率が悪くなる場合がある。
【0005】
本発明の目的は、作業車の収穫作業の効率を高めることにある。
【課題を解決するための手段】
【0006】
本発明に係るシステムの特徴は、機体を備えた作業車を制御するシステムであって、前記機体の周囲を検知する複数のセンサと、1つの前記センサの出力信号に基づいて前記機体の周囲の状況を示す周囲情報を生成する周囲情報生成部と、前記周囲情報において不感領域を特定する特定部と、前記不感領域の全体が他の前記センサによって補完可能な補完領域の内部に位置しているか否かを判定する判定部と、前記機体の自動走行を制御する制御部と、を備え、前記補完領域の内部に位置していると前記判定部が判定したときに前記制御部は前記機体の自動走行を継続し、前記補完領域の内部に位置していないと前記判定部が判定したときに前記制御部は前記機体の自動走行を停止する点にある。
【0007】
上記の特徴構成によれば、周囲情報に現れた不感領域の位置が機体の自動走行に支障があるかどうかを判定することができ、この判定結果に応じて機体の自動走行を制御することで、自動走行の過度な停止を抑制して収穫作業の効率を高めることができる。
【0008】
本発明においては、前記補完領域の内部に位置していないと前記判定部が判定したときに、前記制御部は圃場の端部で前記機体の自動走行を停止すると好適である。
【0009】
本構成によると、圃場の中央部で機体が停止しないので、作業者がセンサの状態の確認などのメンテナンス作業を行いやすい位置に機体を停止することができる。
【0010】
本発明においては、前記センサは、カメラであり、前記周囲情報生成部は、1つの前記カメラの出力信号に基づいて前記機体の周囲の状況を示す画像である前記周囲情報を生成すると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
2か月前
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
定電圧回路
2か月前
株式会社豊田自動織機
自動走行体
10日前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
トヨタ自動車株式会社
制御システム
1か月前
井関農機株式会社
自立走行農作業車
2か月前
トヨタ自動車株式会社
移動システム
2か月前
日昌電気制御株式会社
管理システム
2か月前
株式会社ユタカ
半自動切換装置
2か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
株式会社ダイフク
搬送設備
1か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
トヨタ自動車株式会社
マーカースタンド
2か月前
株式会社豊田自動織機
自律走行車両
2か月前
横河電機株式会社
電流源回路
2か月前
株式会社デンソー
電子制御装置
9日前
住友重機械工業株式会社
自律走行台車
2か月前
株式会社フカデン
外周部加工システム
20日前
個人
ペダル操作検知装置
2か月前
日立建機株式会社
自律走行システム
24日前
三菱電機株式会社
管理システムおよび管理方法
2か月前
大阪瓦斯株式会社
二次圧制御機構
27日前
株式会社デンソー
移動体制御装置
17日前
大阪瓦斯株式会社
二次圧制御機構
27日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
横河電機株式会社
電圧電流変換回路
2か月前
アズビル株式会社
パラメータ探索装置および方法
2か月前
トヨタ自動車株式会社
充電装置
2か月前
株式会社ダイフク
搬送設備の検査装置
27日前
オムロン株式会社
サポート装置およびサポート方法
3か月前
ニチコン株式会社
電源装置
2か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
株式会社デンソー
車両用電子制御装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ