TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024082939
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2022197168
出願日
2022-12-09
発明の名称
走行制御システム及び収穫機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20240613BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】排出作業後の自動走行が容易になりやすい走行制御システム及び収穫機を提供する。
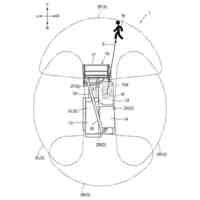
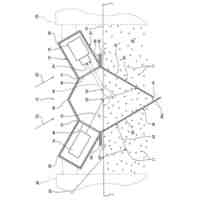
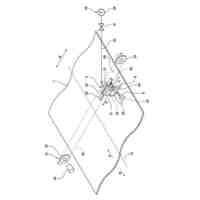
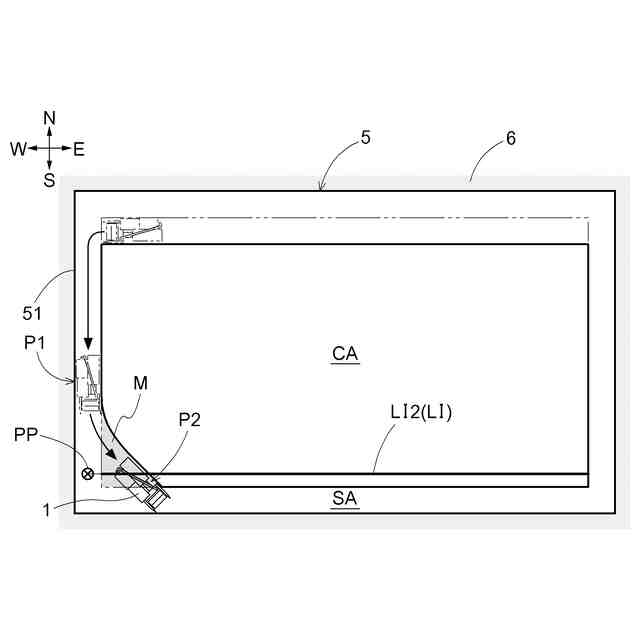
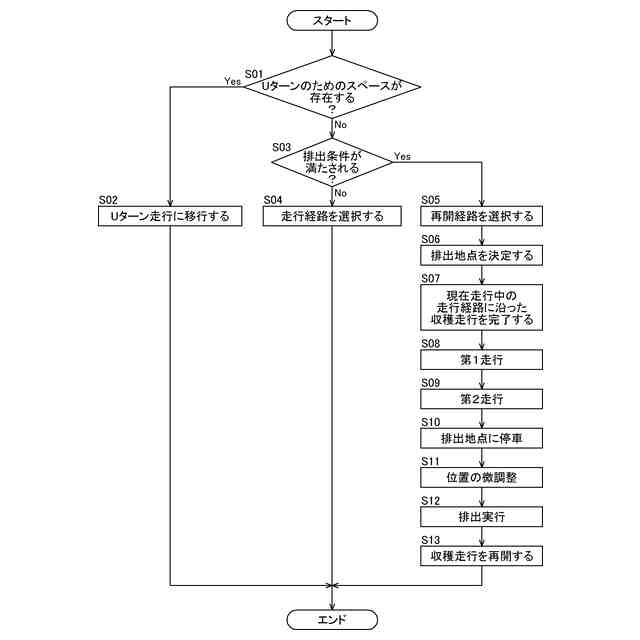
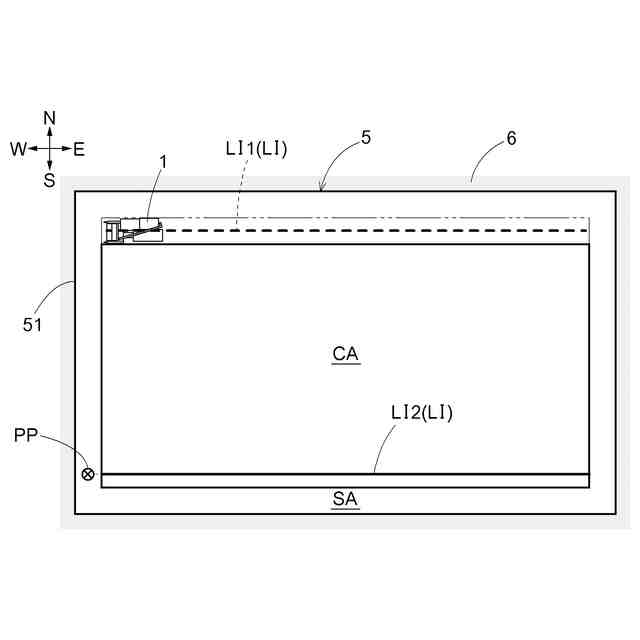
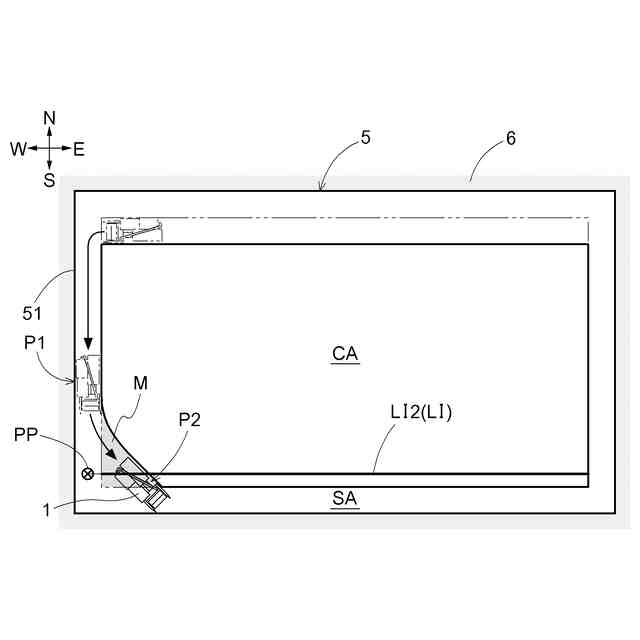
【解決手段】走行制御部は、排出作業を実行するために収穫機1が排出地点PPへ移動する場合、収穫機1が第1走行を実行した後に第2走行を実行するように収穫機1の走行を制御するように構成されており、第1走行は、排出作業後において収穫機1が最初に走行する予定の走行経路LIである再開経路LI2の両端部のうち、排出地点PPに近い側の端部に対応する領域Mでの収穫走行であり、第2走行は、排出地点PPへ移動する走行である。
【選択図】図9
特許請求の範囲
【請求項1】
収穫機の走行を制御する走行制御システムであって、
圃場における収穫対象領域を示す情報を取得する領域取得部と、
前記収穫機が前記収穫対象領域を収穫走行するための複数の走行経路を生成する生成部と、
前記複数の走行経路の中から前記走行経路を選択する経路選択部と、
前記経路選択部により選択された前記走行経路に基づいて前記収穫機の走行を制御する走行制御部と、
前記収穫機が収穫物を排出する排出作業を実行する地点である排出地点を決定する決定部と、を備え、
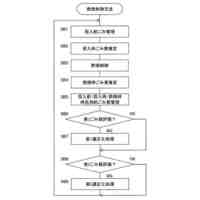
前記走行制御部は、前記排出作業を実行するために前記収穫機が前記排出地点へ移動する場合、前記収穫機が第1走行を実行した後に第2走行を実行するように前記収穫機の走行を制御するように構成されており、
前記第1走行は、前記排出作業後において前記収穫機が最初に走行する予定の前記走行経路である再開経路の両端部のうち、前記排出地点に近い側の端部に対応する領域での収穫走行であり、
前記第2走行は、前記排出地点へ移動する走行である走行制御システム。
続きを表示(約 1,400 文字)
【請求項2】
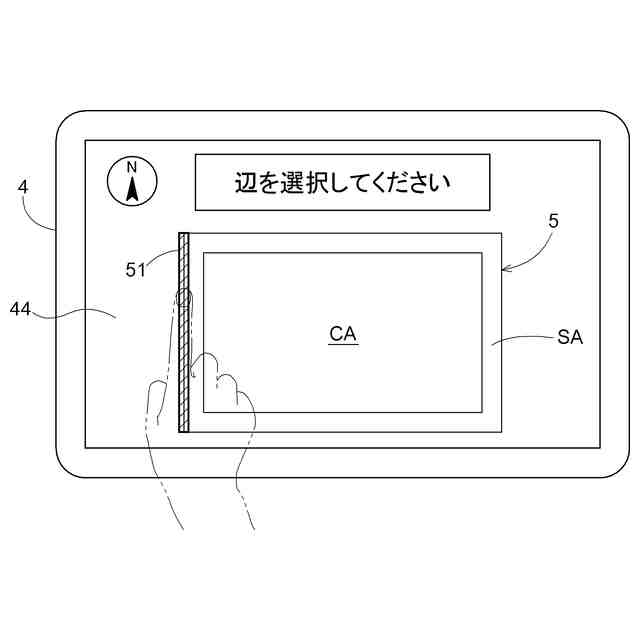
前記圃場の外周を構成する複数の辺の中から一つの前記辺を選択する辺選択部を備え、
前記決定部は、前記辺選択部により選択された前記辺である選択辺に隣接する位置に前記排出地点を決定する請求項1に記載の走行制御システム。
【請求項3】
前記辺選択部は、人為的な操作入力に従って前記辺を選択する請求項2に記載の走行制御システム。
【請求項4】
前記走行制御部は、前記第2走行の後、前記収穫機が前記再開経路に沿う姿勢、且つ、機体後部を前記選択辺へ向けた姿勢で前記排出地点に停車するように前記収穫機の走行を制御する請求項2または3に記載の走行制御システム。
【請求項5】
前記収穫機の走行装置を制御する装置制御部と、
人為的な操作入力を受け付ける入力部と、を備え、
前記装置制御部は、前記収穫機が前記排出地点に停車した後、前記入力部への操作入力に従って、前記収穫機が機体前後方向に移動するように、前記走行装置を制御する請求項4に記載の走行制御システム。
【請求項6】
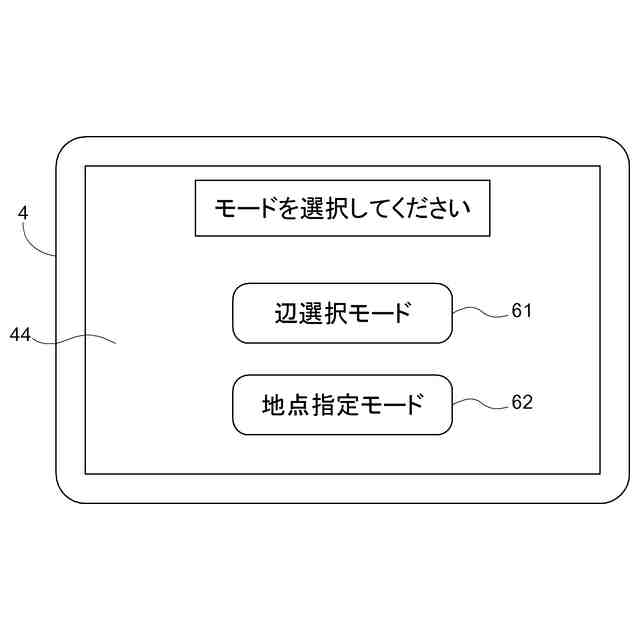
人為的な操作入力によって前記排出地点を指定可能な地点指定部を備え、
前記決定部は、前記地点指定部による指定に従って前記排出地点を決定する請求項1に記載の走行制御システム。
【請求項7】
前記走行制御部は、前記第2走行の後、前記収穫機が機体左側部または機体右側部を、前記圃場の外周を構成する複数の辺のうち、前記排出地点に隣接する前記辺へ向けた姿勢で前記排出地点に停車するように前記収穫機の走行を制御する請求項6に記載の走行制御システム。
【請求項8】
前記圃場の外周を構成する複数の辺の中から一つの前記辺を選択する辺選択部と、
人為的な操作入力によって前記排出地点を指定可能な地点指定部と、を備え、
前記決定部の制御モードは、第1モードと第2モードとの間でモード切替可能であり、
前記決定部の制御モードが前記第1モードである場合、前記決定部は、前記辺選択部により選択された前記辺である選択辺に隣接する位置に前記排出地点を決定し、
前記決定部の制御モードが前記第2モードである場合、前記決定部は、前記地点指定部による指定に従って前記排出地点を決定する請求項1に記載の走行制御システム。
【請求項9】
圃場における収穫対象領域を示す情報を取得する領域取得部と、
機体が前記収穫対象領域を収穫走行するための複数の走行経路を生成する生成部と、
前記複数の走行経路の中から前記走行経路を選択する経路選択部と、
前記経路選択部により選択された前記走行経路に基づいて前記機体の走行を制御する走行制御部と、
前記機体が収穫物を排出する排出作業を実行する地点である排出地点を決定する決定部と、を備え、
前記走行制御部は、前記排出作業を実行するために前記機体が前記排出地点へ移動する場合、前記機体が第1走行を実行した後に第2走行を実行するように前記機体の走行を制御するように構成されており、
前記第1走行は、前記排出作業後において前記機体が最初に走行する予定の前記走行経路である再開経路の両端部のうち、前記排出地点に近い側の端部に対応する領域での収穫走行であり、
前記第2走行は、前記排出地点へ移動する走行である収穫機。
発明の詳細な説明
【技術分野】
【0001】
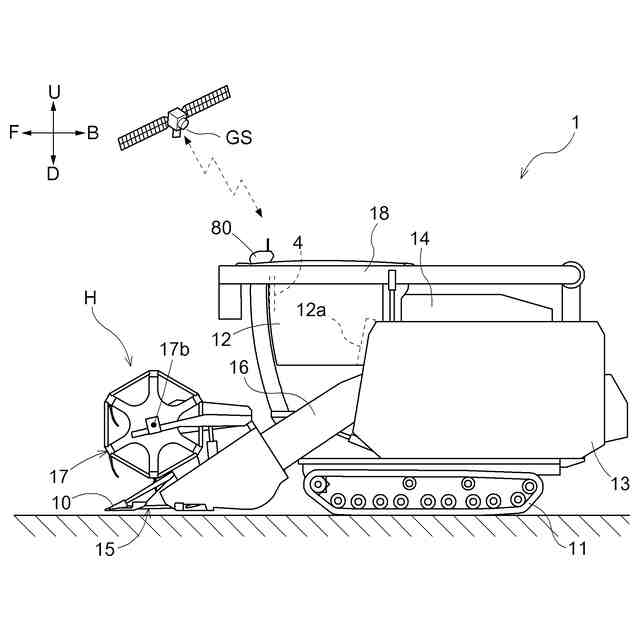
本発明は、収穫機の走行を制御する走行制御システム、及び収穫機に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
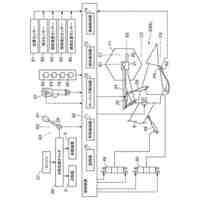
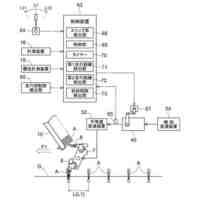
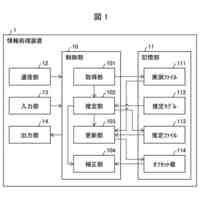
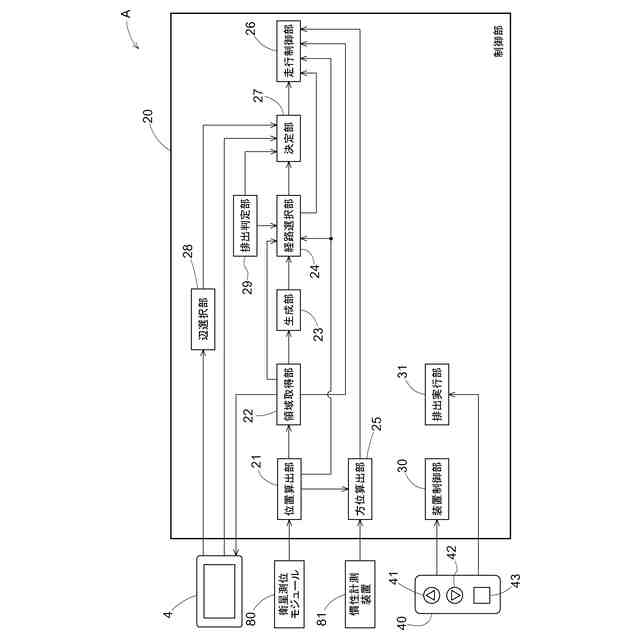
上記のような走行制御システムとして、例えば、特許文献1に記載のものが既に知られている。この走行制御システムは、領域取得部(特許文献1では「領域算出部」)と、生成部(特許文献1では「経路算出部」)と、経路選択部と、走行制御部と、を備えている。
【0003】
領域取得部は、圃場における収穫対象領域を示す情報を取得する。生成部は、収穫機(特許文献1では「コンバイン」)が収穫対象領域を収穫走行するための複数の走行経路(特許文献1では「刈取走行経路」)を生成する。経路選択部は、複数の走行経路の中から走行経路を選択する。走行制御部は、経路選択部により選択された走行経路に基づいて収穫機の走行を制御する。これにより、収穫機は、圃場において自動走行しながら収穫作業を行うことができる。
【先行技術文献】
【特許文献】
【0004】
特開2022-2481号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、圃場における収穫作業の途中で、収穫機が収穫走行を中断し、収穫物を排出した後の走行については説明されていない。
【0006】
特許文献1に記載されているような走行制御システムにおいて、収穫機が収穫物の排出作業を実行した後、自動走行による収穫走行を再開するためには、収穫機は、再開経路の端部へ移動すると共に、機体方位(機体の姿勢方位)を再開経路の延びる方向に合わせる必要がある。尚、再開経路とは、排出作業後において収穫機が最初に走行する予定の走行経路である。
【0007】
このとき、収穫機の旋回のために利用可能なスペースが比較的狭い場合、収穫機が、自動走行によって、再開経路の端部へ移動すると共に、機体方位を再開経路の延びる方向に合わせることが困難になりがちである。即ち、排出作業後に、収穫走行を再開する地点まで移動するための走行であって、且つ、機体方位を、収穫走行を再開できる方位とするための走行を、自動走行によって行うことが困難になりがちである。
【0008】
本発明の目的は、排出作業後の自動走行が容易になりやすい走行制御システム及び収穫機を提供することである。
【課題を解決するための手段】
【0009】
本発明に係る走行制御システムの特徴は、収穫機の走行を制御する走行制御システムであって、圃場における収穫対象領域を示す情報を取得する領域取得部と、前記収穫機が前記収穫対象領域を収穫走行するための複数の走行経路を生成する生成部と、前記複数の走行経路の中から前記走行経路を選択する経路選択部と、前記経路選択部により選択された前記走行経路に基づいて前記収穫機の走行を制御する走行制御部と、前記収穫機が収穫物を排出する排出作業を実行する地点である排出地点を決定する決定部と、を備え、前記走行制御部は、前記排出作業を実行するために前記収穫機が前記排出地点へ移動する場合、前記収穫機が第1走行を実行した後に第2走行を実行するように前記収穫機の走行を制御するように構成されており、前記第1走行は、前記排出作業後において前記収穫機が最初に走行する予定の前記走行経路である再開経路の両端部のうち、前記排出地点に近い側の端部に対応する領域での収穫走行であり、前記第2走行は、前記排出地点へ移動する走行であることにある。
【0010】
本発明に係る収穫機の特徴は、圃場における収穫対象領域を示す情報を取得する領域取得部と、機体が前記収穫対象領域を収穫走行するための複数の走行経路を生成する生成部と、前記複数の走行経路の中から前記走行経路を選択する経路選択部と、前記経路選択部により選択された前記走行経路に基づいて前記機体の走行を制御する走行制御部と、前記機体が収穫物を排出する排出作業を実行する地点である排出地点を決定する決定部と、を備え、前記走行制御部は、前記排出作業を実行するために前記機体が前記排出地点へ移動する場合、前記機体が第1走行を実行した後に第2走行を実行するように前記機体の走行を制御するように構成されており、前記第1走行は、前記排出作業後において前記機体が最初に走行する予定の前記走行経路である再開経路の両端部のうち、前記排出地点に近い側の端部に対応する領域での収穫走行であり、前記第2走行は、前記排出地点へ移動する走行であることにある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
収穫機
9日前
株式会社クボタ
収穫機
11日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
4日前
株式会社クボタ
システム
2日前
株式会社クボタ
圃場作業車
4日前
株式会社クボタ
葉菜類収穫機
11日前
株式会社クボタ
浮遊物観測装置
2日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
電解水生成装置
10日前
株式会社クボタ
システム及び作業車
3日前
株式会社クボタ
廃棄物の圧縮成形装置
3日前
株式会社クボタ
制御システム及び作業車
2日前
株式会社クボタ
走行制御システム及び収穫機
9日前
株式会社クボタ
車両制御システム及び作業車
9日前
株式会社クボタ
作業車及び作業車を制御するシステム
2日前
株式会社クボタ
セグメント連結具及びセグメント連結方法
10日前
株式会社クボタ
作業車、及び、作業車の自動走行制御システム
3日前
株式会社クボタ
ごみピットの管理方法及びごみピットの管理装置
16日前
株式会社クボタケミックス
排水集合管における外層部材の止水性の検査方法
3日前
株式会社クボタ
作業機
1日前
株式会社クボタ
固液分離装置および固液分離装置の無端ベルトの洗浄方法
12日前
株式会社クボタ
トラクタ
1日前
株式会社クボタ
作業車両
1日前
株式会社クボタ
ごみ焼却炉の燃焼制御方法及びごみ焼却炉の燃焼制御装置
16日前
株式会社クボタ
基準画像生成方法
8日前
株式会社クボタ
油圧クラッチとこの油圧クラッチを備えた作業車用走行動力伝達装置
2日前
株式会社クボタ
情報処理装置、脱水機、含水率推定方法、および含水率推定プログラム
9日前
株式会社クボタ
情報処理装置、脱水機、含水率推定方法、および含水率推定プログラム
9日前
株式会社クボタ
膜洗浄風量制御システム、膜洗浄風量制御方法および膜洗浄風量制御プログラム
9日前
株式会社クボタ
ポーラスコンクリート層の非破壊診断方法、非破壊診断装置および非破壊診断プログラム
10日前
株式会社クボタ
表面溶融炉、表面溶融炉における被処理物の供給状態の監視方法、及び表面溶融炉の運転方法
3日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ