TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024088433
公報種別
公開特許公報(A)
公開日
2024-07-02
出願番号
2022203596
出願日
2022-12-20
発明の名称
車両
出願人
トヨタ自動車株式会社
代理人
弁理士法人 快友国際特許事務所
主分類
B60L
15/20 20060101AFI20240625BHJP(車両一般)
要約
【課題】インホイールモータにおいて、モータ本体を収容するケーシングの振動を低減し得る技術を提供する。
【解決手段】車両は、車輪と、車輪を駆動するインホイールモータと、インホイールモータの回転数を検出する回転数センサと、インホイールモータのトルク目標値に基づいて、インホイールモータを制御する制御装置と、を備える。インホイールモータは、モータ本体と、モータ本体によって駆動される第1回転軸と、第1回転軸に対してオフセットされているとともに、車輪に接続される第2回転軸と、第1回転軸と第2回転軸との間でトルクを伝達するトルク伝達機構と、モータ本体及びトルク伝達機構を収容しているとともに、第1回転軸及び第2回転軸を支持しているケーシングと、を備える。制御装置は、回転数センサによる検出値の時間変化率が所定の第1閾値を超える場合に、時間変化率が小さくなるようにトルク目標値を調整可能である。
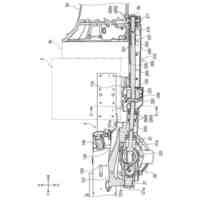
【選択図】図3
特許請求の範囲
【請求項1】
車輪と、
前記車輪を駆動するインホイールモータと、
前記インホイールモータの回転数を検出する回転数センサと、
前記インホイールモータのトルク目標値に基づいて、前記インホイールモータを制御する制御装置と、
を備え、
前記インホイールモータは、
モータ本体と、
前記モータ本体によって駆動される第1回転軸と、
前記第1回転軸に対してオフセットされているとともに、前記車輪に接続される第2回転軸と、
前記第1回転軸と前記第2回転軸との間でトルクを伝達するトルク伝達機構と、
前記モータ本体及び前記トルク伝達機構を収容しているとともに、前記第1回転軸及び前記第2回転軸を支持しているケーシングと、
を備え、
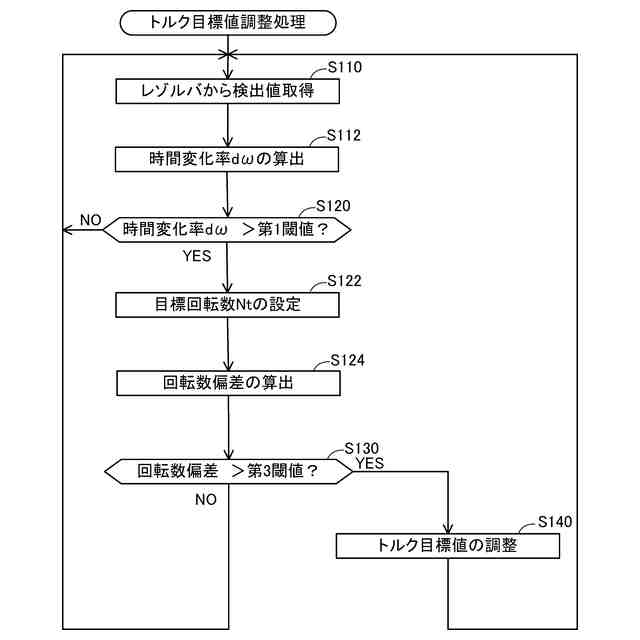
前記制御装置は、前記回転数センサによる検出値の時間変化率が所定の第1閾値を超える場合に、前記時間変化率が小さくなるように前記トルク目標値を調整可能である、
車両。
続きを表示(約 430 文字)
【請求項2】
前記制御装置は、前記トルク目標値と前記時間変化率と予め記憶している計算式とに基づいて、前記ケーシングに加えられるケーシングトルクの推定値を算出し、
前記時間変化率が前記所定の第1閾値を超えるとともに、前記ケーシングトルクが第2閾値を超える場合に、前記トルク目標値の調整を実行する、請求項1に記載の車両。
【請求項3】
前記計算式は、前記第1回転軸の慣性モーメントと、前記第2回転軸の慣性モーメントと、前記モータ本体の慣性モーメントと、前記トルク伝達機構における減速比とに基づく、請求項2に記載の車両。
【請求項4】
前記制御装置は、前記時間変化率が前記第1閾値を超えたときに、その直前に検出された前記回転数センサの検出値を目標回転数として設定し、前記回転数センサによる検出値と前記目標回転数との間の偏差が第3閾値を超える場合に、前記偏差に基づいて前記トルク目標値を調整する、請求項1に記載の車両。
発明の詳細な説明
【技術分野】
【0001】
本明細書に開示の技術は、車両に関する。特に、車輪を駆動するインホイールモータを備える車両に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1に開示されるインホイールモータは、サスペンションを介さずに、車輪に対して直接的に接続される。具体的には、インホイールモータは、第1モータと、第1モータの出力軸と接続された第1ドライブギアと、第1ドライブギアと噛み合うドリブンギアと、ドリブンギアと接続された車輪の駆動軸と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2020-090979号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のインホイールモータでは、第1モータを収容するモータケーシングと、ドリブンギアを収容するギアケーシングと、が一体として形成されている。このため、モータケーシングには、ドリブンギアの反力が加えられる。ドリブンギアの反力は、モータケーシングを振動させる。また、サスペンションを介さず車輪に直接的に接続されるインホイールモータでは、例えば車輪が段差を乗り越える際に、モータケーシングに振動が生じると、車両室内に騒音が発生しやすい。本明細書では、インホイールモータにおいて、モータ本体を収容するケーシングの振動を低減し得る技術を提供する。
【課題を解決するための手段】
【0005】
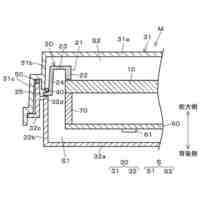
本明細書が開示する車両は、車輪と、前記車輪を駆動するインホイールモータと、前記インホイールモータの回転数を検出する回転数センサと、前記インホイールモータのトルク目標値に基づいて、前記インホイールモータを制御する制御装置と、を備える。前記インホイールモータは、モータ本体と、前記モータ本体によって駆動される第1回転軸と、前記第1回転軸に対してオフセットされているとともに、前記車輪に接続される第2回転軸と、前記第1回転軸と前記第2回転軸との間でトルクを伝達するトルク伝達機構と、前記モータ本体及び前記トルク伝達機構を収容しているとともに、前記第1回転軸及び前記第2回転軸を支持しているケーシングと、を備える。前記制御装置は、前記回転数センサによる検出値の時間変化率が所定の第1閾値を超える場合に、前記時間変化率が小さくなるように前記トルク目標値を調整可能である。
【0006】
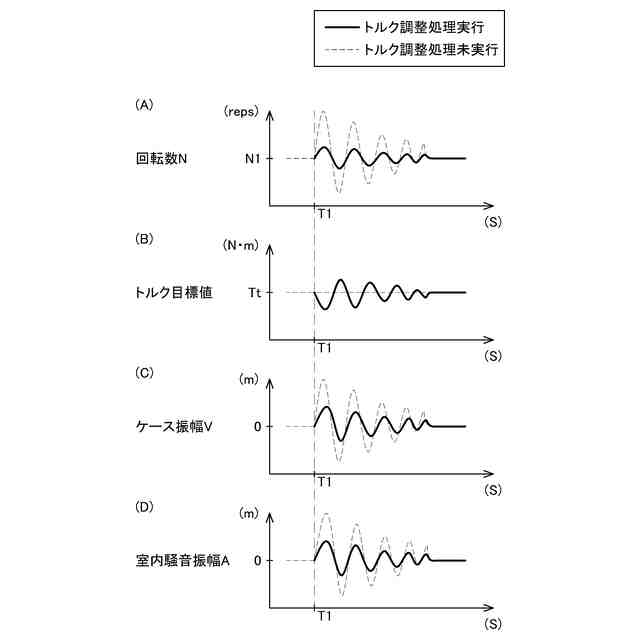
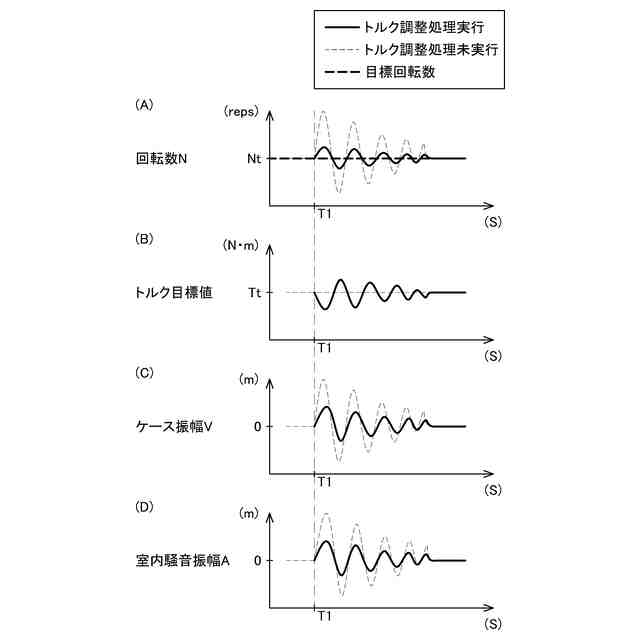
例えば、車両の車輪が段差を乗り越えると、外乱が発生し、モータ本体の回転数の時間変化率が大きくなる。上述した車両は、モータ本体の回転数を監視し、時間変化率が第1閾値を超える場合に、時間変化率が小さくなるようにトルク目標値を調整可能である。これにより、モータ本体を収容するケーシングの振動を低減し得る。
【0007】
本明細書が開示する技術の詳細とさらなる改良は以下の「発明を実施するための形態」にて説明する。
【図面の簡単な説明】
【0008】
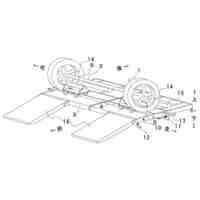
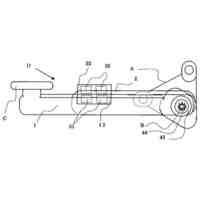
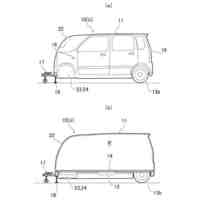
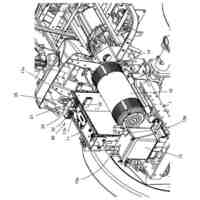
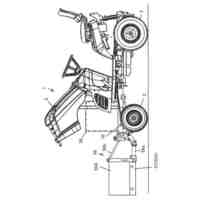
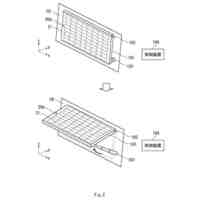
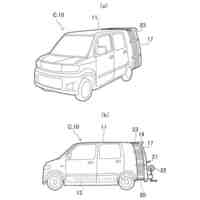
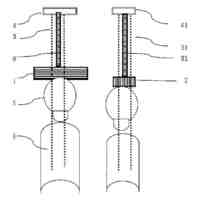
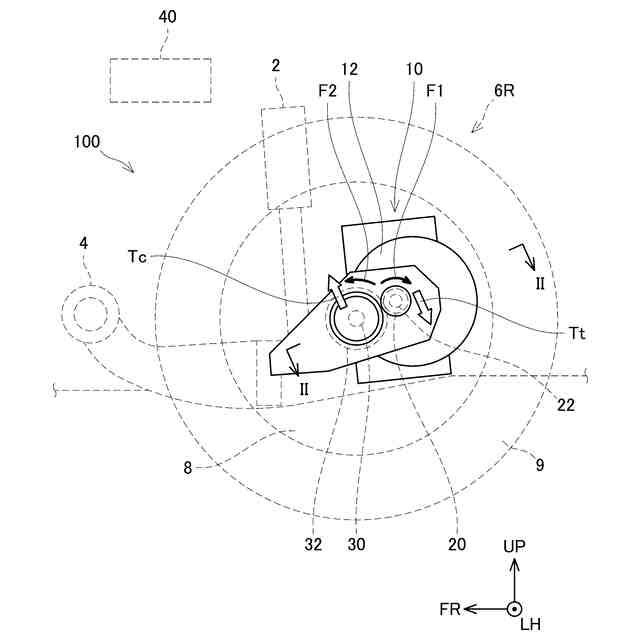
第1実施例の電動車両100の後部の側面図を示す。
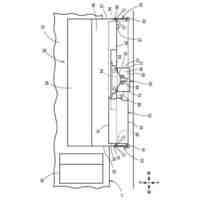
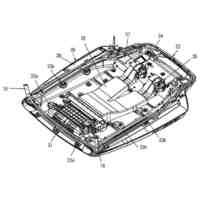
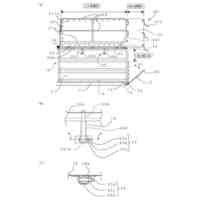
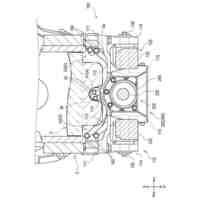
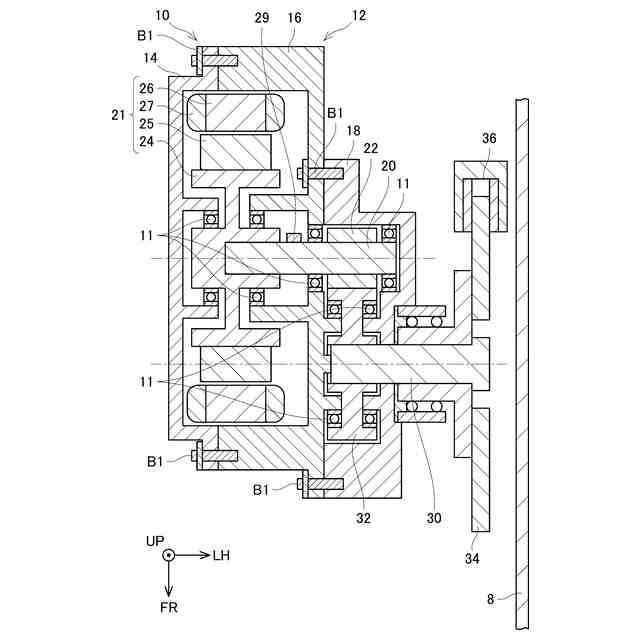
図1の線II-IIに沿った断面図を示す。
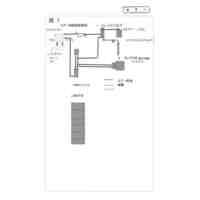
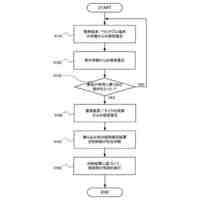
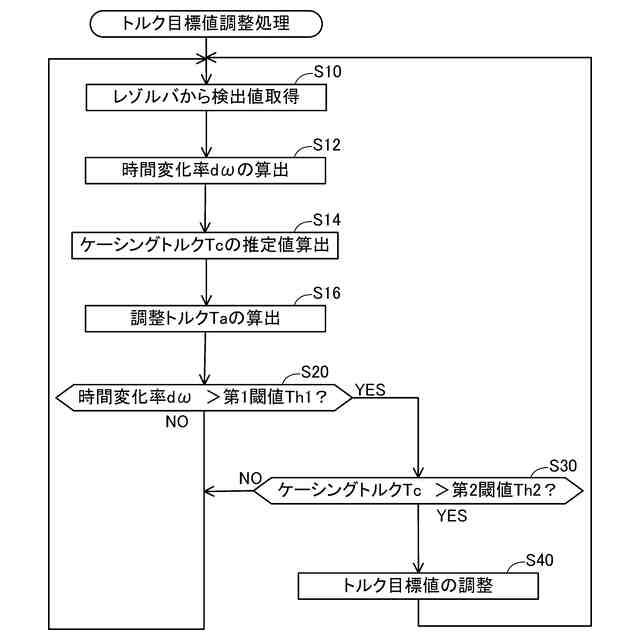
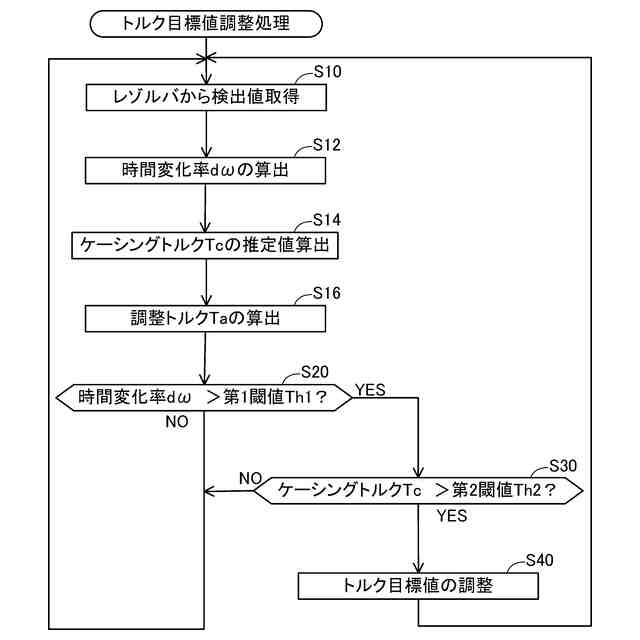
第1実施例の制御装置40が実行するトルク目標値調整処理のフロー図を示す。
第1実施例の電動車両100における各値の経時変化のグラフを示す。
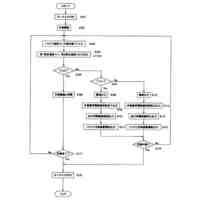
第2実施例の制御装置40が実行するトルク目標値調整処理のフロー図を示す。
第2実施例の電動車両100における各値の経時変化のグラフを示す。
【発明を実施するための形態】
【0009】
本技術の一実施形態では、前記制御装置は、前記トルク目標値と前記時間変化率と予め記憶している計算式に基づいて、前記ケーシングに加えられるケーシングトルクの推定値を算出してもよい。その場合、前記時間変化率が前記所定の第1閾値を超えるとともに、前記ケーシングトルクが第2閾値を超える場合に、前記トルク目標値の調整を実行してもよい。このような構成によると、第2閾値を超えるケーシングトルクがケーシングに加えられると推測される場合に、トルク目標値の調整を実行してケーシングの振動を低減することができる。
【0010】
本技術の一実施形態では、前記計算式は、前記第1回転軸の慣性モーメントと、前記第2回転軸の慣性モーメントと、前記モータ本体の慣性モーメントと、前記トルク伝達機構における減速比とに基づいてもよい。但し、別の実施形態では、例えば、制御装置は、ケーシングに設けられたトルクセンサの検出値に基づいて、ケーシングトルクの推定値を算出してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
設置部材
1か月前
個人
車両用エアー傘
今日
個人
骨組み型熱交換器
2か月前
個人
自動車盗難防止装置
今日
個人
車内雨傘載置収納具
1か月前
個人
自動車暴走抑制装置
2か月前
井関農機株式会社
作業車両
2か月前
個人
荷台雨除け装置
9日前
日本精機株式会社
表示装置
1か月前
株式会社タイヨー産業
補助枕
1か月前
個人
キャンピングトレーラー
24日前
東レ株式会社
フロントグリル
2か月前
日本精機株式会社
表示システム
1か月前
個人
全自動解除式シートベルト
14日前
株式会社豊田自動織機
電動車両
15日前
井関農機株式会社
作業車両
29日前
株式会社SUBARU
車両
2か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
2日前
井関農機株式会社
作業車両
2日前
トヨタ自動車株式会社
車両
3か月前
トヨタ自動車株式会社
車両
1か月前
株式会社SUBARU
車両
2か月前
トヨタ自動車株式会社
車両
1か月前
株式会社SUBARU
車両
2か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3日前
井関農機株式会社
作業車両
3か月前
個人
テーブル付きハンドルガード具
10日前
個人
セパレート型キャンピングカー
今日
株式会社コーワ
フィルター清掃装置
7日前
新明和工業株式会社
荷箱の天蓋装置
2か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
個人
視認ペダル操作システム
21日前
株式会社コーワ
フィルター清掃装置
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ