TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024087412
公報種別
公開特許公報(A)
公開日
2024-07-01
出願番号
2022202229
出願日
2022-12-19
発明の名称
産業用ロボット
出願人
株式会社ダイヘン
代理人
弁理士法人平木国際特許事務所
主分類
B25J
9/06 20060101AFI20240624BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アッパアームの長手方向に沿った回転軸の周りに、アッパアーム全体を回転させようとすると、アッパアームの振れが大きくなるおそれがある。
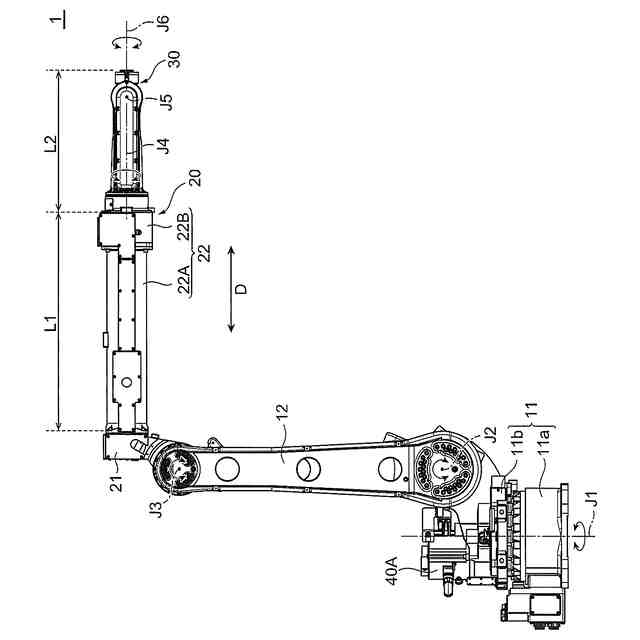
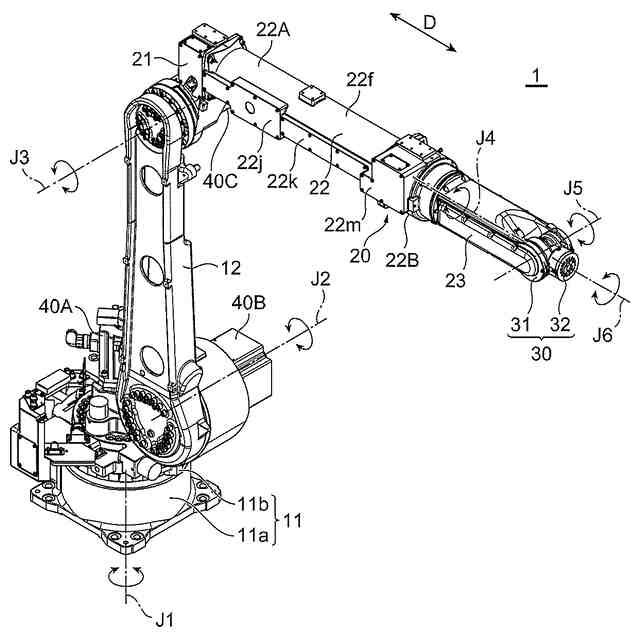
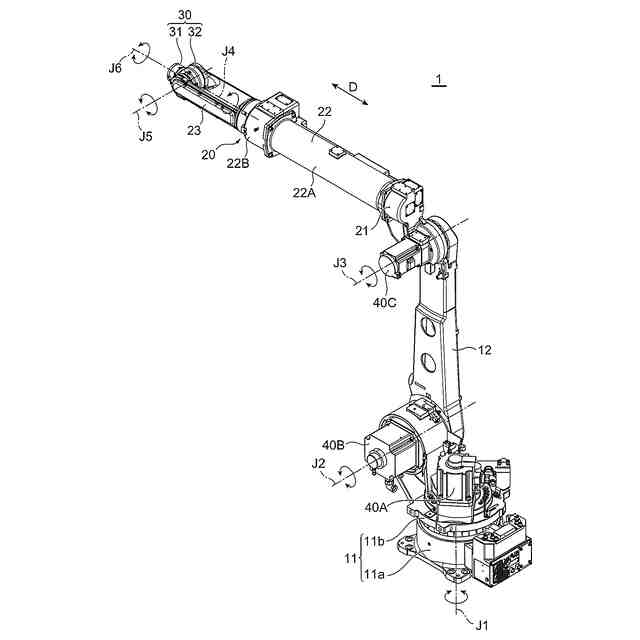
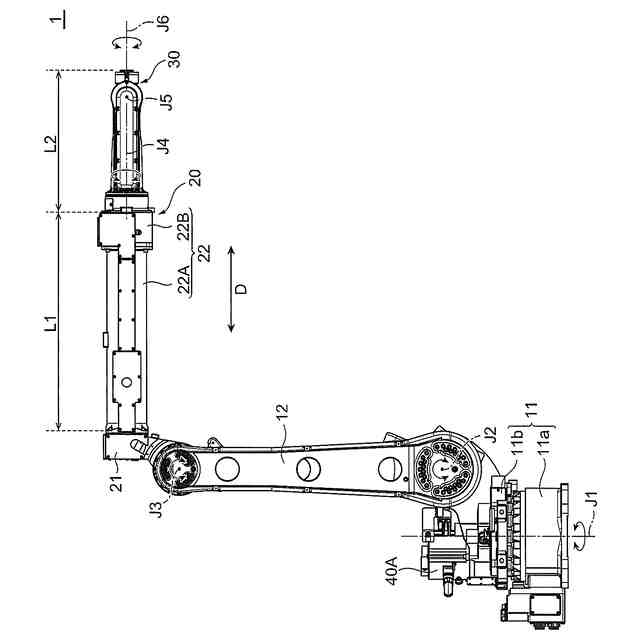
【解決手段】産業用ロボット1のアッパアーム20は、ロアアーム12に枢着されたショルダ部21と、ショルダ部21に取り付けられ、アッパアーム20の長手方向Dに沿って延在した第1アーム22と、第1アーム22の先端に接続され、長手方向Dに沿って延在し、支持アーム30が枢着された第2アーム23と、を備える。長手方向Dにおいて、第1アーム22の長さL1は、第2アーム23の長さL2よりも長く、第2アーム23は、ショルダ部21および第1アーム22に対して、長手方向Dに沿った第4軸J4の周りに、回転自在に取り付けられている。
【選択図】図3
特許請求の範囲
【請求項1】
基台に基端が枢着されたロアアームと、
前記ロアアームの先端に枢着されたアッパアームと、
前記アッパアームの先端に枢着された支持アームと、を備えた産業用ロボットであって、
前記アッパアームは、
前記ロアアームに枢着されたショルダ部と、
前記ショルダ部に取り付けられ、前記アッパアームの長手方向に沿って延在し、前記ロアアームに接続された第1アームと、
前記第1アームの先端に接続され、前記長手方向に沿って延在し、前記支持アームが枢着された第2アームと、を備えており、
前記長手方向において、前記第1アームの長さは、前記第2アームの長さよりも長く、
前記第2アームは、前記ショルダ部および前記第1アームに対して、前記長手方向に沿った回転軸の周りに、回転自在に取り付けられていることを特徴とする産業用ロボット。
続きを表示(約 430 文字)
【請求項2】
前記第1アームには、前記第2アームを、前記回転軸の周りに回転させる駆動モータが収容されていることを特徴とする請求項1に記載の産業用ロボット。
【請求項3】
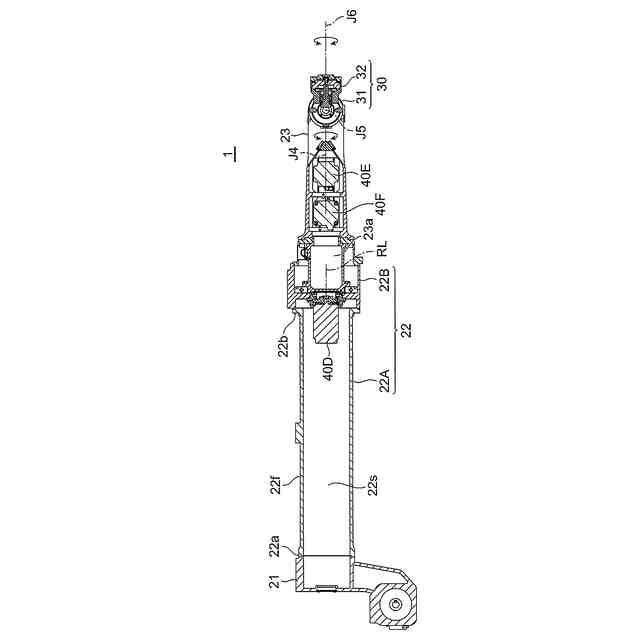
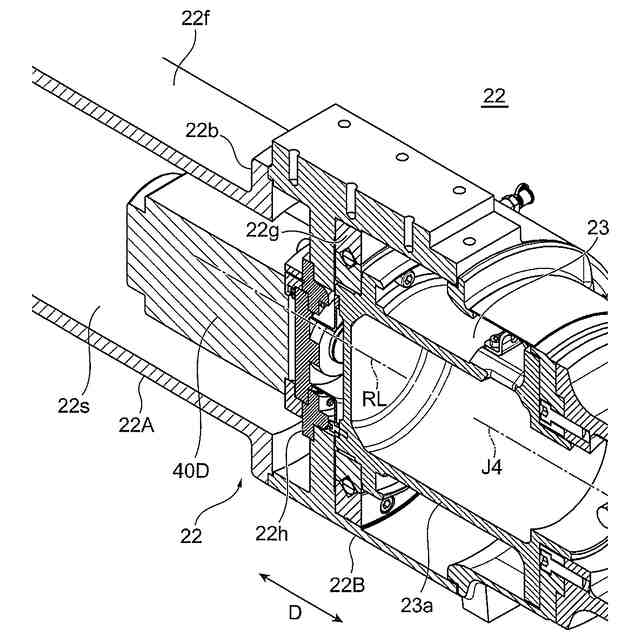
前記駆動モータの出力軸と、前記第2アームの前記回転軸とが、同一線上にあり、前記第1アームには、前記長手方向に沿って形成された中空部分が形成されており、前記中空部分に、前記駆動モータが収容されていることを特徴とする請求項2に記載の産業用ロボット。
【請求項4】
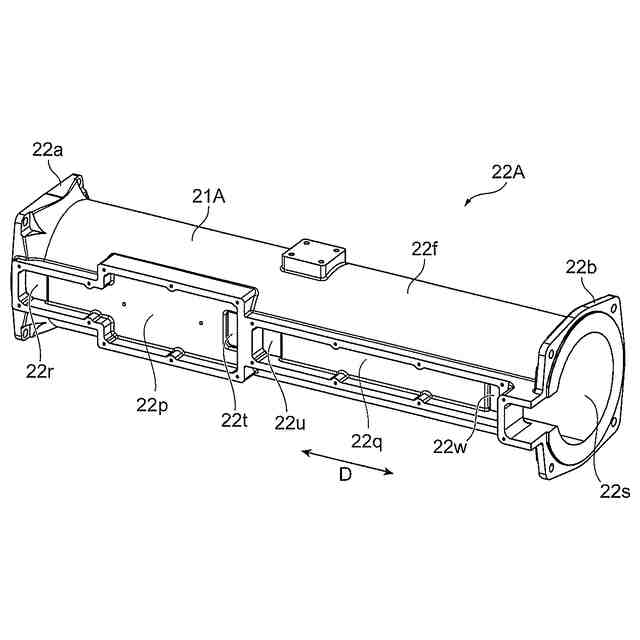
前記第1アームは、
前記長手方向に沿って前記中空部分が形成された筒状のアーム本体と、
前記アーム本体の先端に取り付けられ、前記第2アームを前記回転軸の周りに回転自在に接続する接続部と、を備えており、
前記駆動モータは、前記アーム本体の先端側から、前記中空部分に収容された状態で、前記接続部に取り付けられていることを特徴とする、請求項3に記載の産業用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボットに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、この種の産業用ロボットとして、特許文献1には、基台に基端が枢着されたロアアームと、ロアアームの先端に枢着されるアッパアームと、アッパアームの先端に枢着された支持アームと、を備えた産業用ロボットが提案されている。
【0003】
このアッパアームは、ショルダ部を有しており、ショルダ部には、アッパアームの長手方向に延在したアーム本体が取り付けられている。アーム本体は、ショルダ部に対して、アッパアームの長手方向に沿った回転軸の周りに、回転自在に取り付けられている。
【先行技術文献】
【特許文献】
【0004】
特開2009-6454号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に係る産業用ロボットでは、アッパアームの長手方向に沿った回転軸の周りに、アッパアーム全体を回転させようとすると、アッパアームの振れが大きくなるおそれがある。特に、アッパアームの長さが長くなるにしたがって、このような現象が顕著なものになる。
【0006】
本発明はこのような点に鑑みてなされたものであり、その目的とするところは、アッパアームの長手方向に沿った回転軸の周りに、アッパアーム全体を回転させようとした際に、アッパアームの振れ周りを抑えることができる産業用ロボットを提供することにある。
【課題を解決するための手段】
【0007】
前記課題を鑑みて、本発明に係る産業用ロボットは、基台に基端が枢着されたロアアームと、前記ロアアームの先端に枢着されたアッパアームと、前記アッパアームの先端に枢着された支持アームと、を備えた産業用ロボットであって、前記アッパアームは、前記ロアアームに枢着されたショルダ部と、前記ショルダ部に取り付けられ、前記アッパアームの長手方向に沿って延在し、前記ロアアームに接続された第1アームと、前記第1アームの先端に接続され、前記長手方向に沿って延在し、前記支持アームが枢着された第2アームと、を備えており、前記長手方向において、前記第1アームの長さは、前記第2アームの長さよりも長く、前記第2アームは、前記ショルダ部および前記第1アームに対して、前記長手方向に沿った回転軸の周りに、回転自在に取り付けられていることを特徴とする。
【0008】
本発明の産業用ロボットのアッパアームは、ショルダ部と、第1および第2アームと、で構成されている。ここで、第2アームは、ショルダ部および第1アームに対して、長手方向に沿った回転軸の周りに、回転自在に取り付けられており、第1アームの長さは、第2アームの長さよりも長い。したがって、ショルダ部に対して、第1および第2アーム全体を、回転軸の周りに回転させる場合に比べて、本発明の如く、ショルダ部および第1アームに対して、第2アームを、回転軸の周りに回転させた場合には、アッパアームの振れを抑えることができる。
【0009】
より好ましい態様としては、前記第1アームには、前記第2アームを、前記回転軸の周りに回転させる駆動モータが収容されている。
【0010】
この態様によれば、第1アームおよび第2アームを回転軸の周りに回転させる動力に比べて、第2アームのみを回転軸の周りに回転させる動力は小さい。このため、回転軸の周りに回転させる駆動モータの大きさをコンパクトにすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
短絡移行アーク溶接の送給制御方法
1日前
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
7か月前
株式会社ツノダ
挟持工具
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
8日前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
川崎重工業株式会社
罫書用治具
25日前
株式会社マキタ
動力工具
1か月前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
6か月前
学校法人立命館
ロボットハンド
4か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
関節機構
7か月前
個人
作業台
7か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
トヨタ自動車株式会社
ハンド構造
15日前
CKD株式会社
電動把持装置
2か月前
東京都公立大学法人
ロボットハンド
1か月前
国立大学法人山形大学
二重関節機構
1か月前
株式会社不二越
予測システム
4か月前
宮川工機株式会社
板状部品移動装置
1か月前
国立大学法人東北大学
剛性可変連結体
7か月前
株式会社共和製作所
ロボット用アーム
2か月前
株式会社ダイヘン
画像生成装置
3か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
24日前
小倉クラッチ株式会社
ロボットハンド
6か月前
工機ホールディングス株式会社
作業機
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ