TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024087199
公報種別
公開特許公報(A)
公開日
2024-07-01
出願番号
2022201855
出願日
2022-12-19
発明の名称
車両の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60K
17/354 20060101AFI20240624BHJP(車両一般)
要約
【課題】車両の乗り心地を改善できる車両の制御装置を提供する。
【解決手段】前輪と後輪とが独立して駆動される四輪駆動の車両1の制御装置20において、演算部は、車両1の加速中に前輪(左前輪14fl、右前輪14fr)が低μ路から高μ路に乗り移った場合、前輪が低μ路から高μ路に乗り移ってから、後輪(左後輪14rl、右後輪14rr)が低μ路から高μ路に乗り移るまでの予測時間を演算する。駆動制御部は、前輪が低μ路から高μ路に乗り移ってから予測時間が経過する前に後輪駆動力を低下させる。
【選択図】図1
特許請求の範囲
【請求項1】
前輪と後輪とが独立して駆動される四輪駆動の車両の制御装置であって、
前記車両の加速中に前記前輪が低μ路から高μ路に乗り移った場合、前記前輪が低μ路から高μ路に乗り移ってから、前記後輪が低μ路から高μ路に乗り移るまでの予測時間を演算する演算部と、
前記前輪が低μ路から高μ路に乗り移ってから前記予測時間が経過する前に後輪駆動力を低下させる駆動制御部と、
を備えることを特徴とする車両の制御装置。
続きを表示(約 490 文字)
【請求項2】
前記駆動制御部は、前記前輪が低μ路から高μ路に乗り移ってから、前記予測時間から所定時間を減じた第1時間が経過したとき、後輪駆動力を低下させる、
ことを特徴とする請求項1に記載の車両の制御装置。
【請求項3】
前記駆動制御部は、前記第1時間が経過するまでは前記車両のアクセル開度率に応じて後輪駆動力を制御し、前記第1時間が経過してからは後輪スリップ量に応じて後輪駆動力を制御する、
ことを特徴とする請求項2に記載の車両の制御装置。
【請求項4】
前記駆動制御部は、前記前輪が低μ路から高μ路に乗り移ってから、前記予測時間に所定時間を加えた第2時間が経過したとき、アクセル開度率に応じて後輪駆動力を制御する、
ことを特徴とする請求項3に記載の車両の制御装置。
【請求項5】
前記前輪が低μ路から高μ路に乗り移ったことは、前記車両の加速中に当該前輪がスリップしている状態から当該前輪のスリップが収束した状態になったことに相当する、
ことを特徴とする請求項1に記載の車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、四輪駆動の車両の制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
前輪または後輪の一方をエンジンで駆動し、他方をモータで駆動する前後輪駆動車両が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2002-152905号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
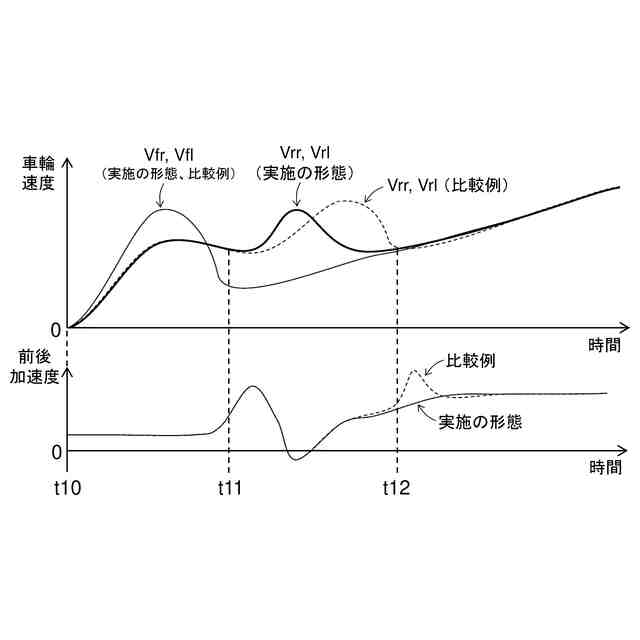
前輪と後輪とが独立して駆動される四輪駆動の車両が、加速しながら低μ路から高μ路に乗り移る場合、前輪が低μ路から高μ路に乗り移るタイミングと、後輪が低μ路から高μ路に乗り移るタイミングとのそれぞれにおいて、加速ショックが発生する可能性がある。そのため、乗り心地が悪化する可能性がある。
【0005】
本発明の目的は、車両の乗り心地を改善できる車両の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の車両の制御装置は、前輪と後輪とが独立して駆動される四輪駆動の車両の制御装置であって、前記車両の加速中に前記前輪が低μ路から高μ路に乗り移った場合、前記前輪が低μ路から高μ路に乗り移ってから、前記後輪が低μ路から高μ路に乗り移るまでの予測時間を演算する演算部と、前記前輪が低μ路から高μ路に乗り移ってから前記予測時間が経過する前に後輪駆動力を低下させる駆動制御部と、を備える。
【発明の効果】
【0007】
本発明によれば、車両の乗り心地を改善できる車両の制御装置を提供できる。
【図面の簡単な説明】
【0008】
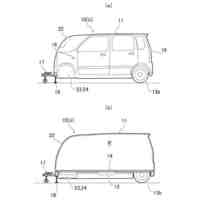
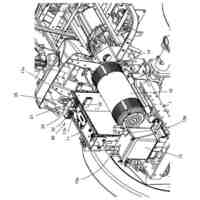
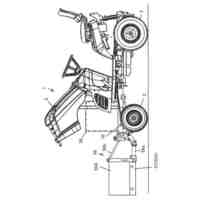
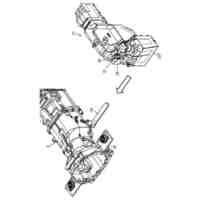
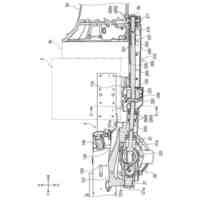
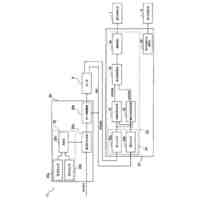
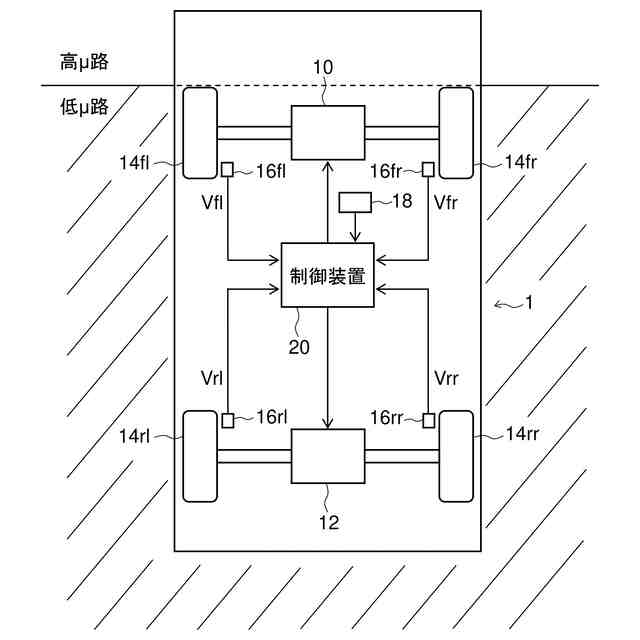
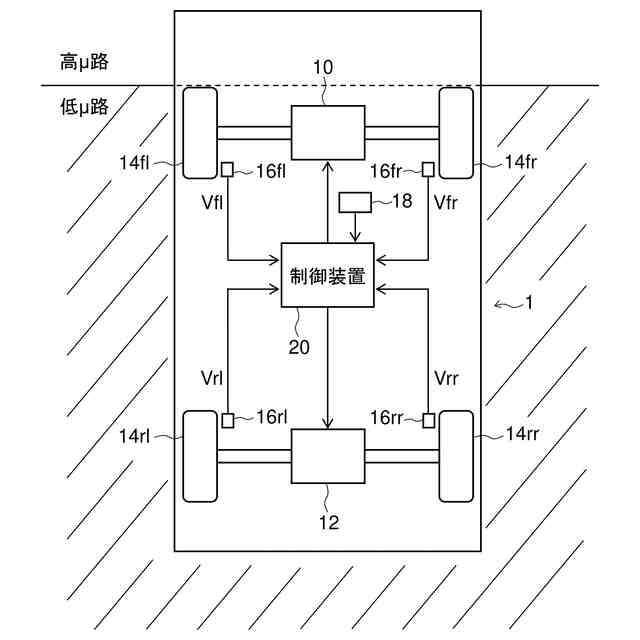
実施の形態の車両の構成を概略的に示す図である。
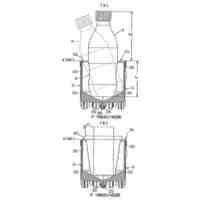
図1の車両と比較例の車両のそれぞれが加速しながら低μ路から高μ路に乗り移るときの車輪速度と前後加速度を示す図である。
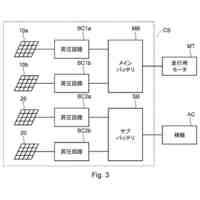
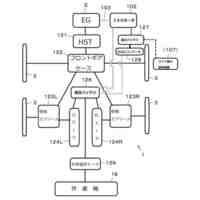
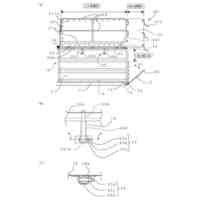
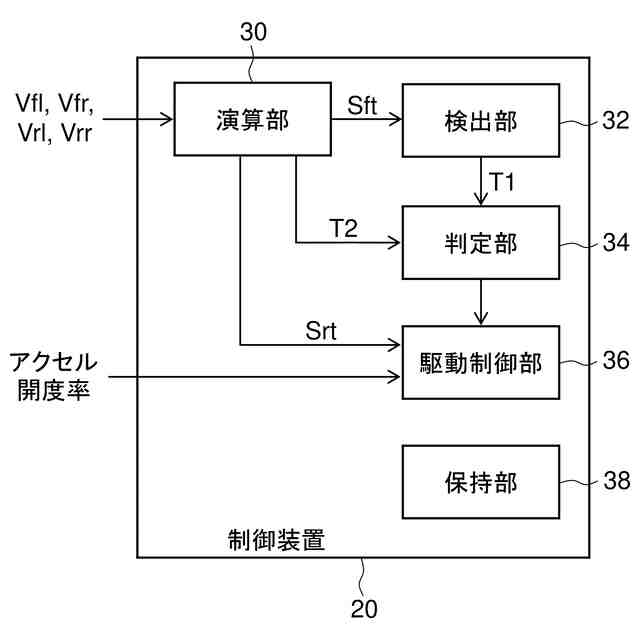
図1の制御装置の機能ブロックを示す図である。
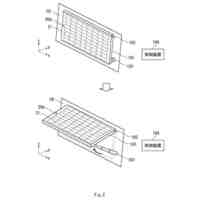
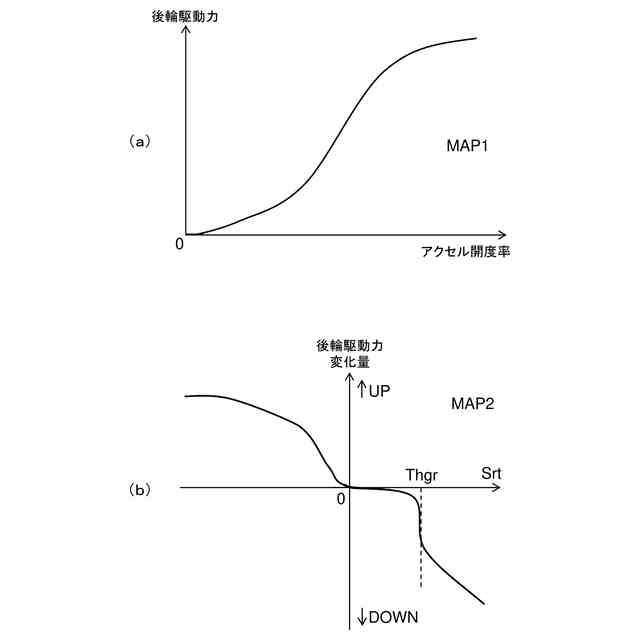
図3の保持部に保持されている第1マップと第2マップを説明するための図である。
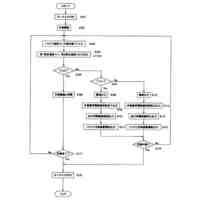
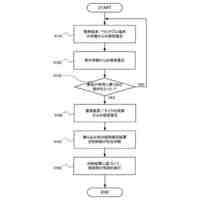
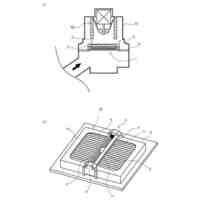
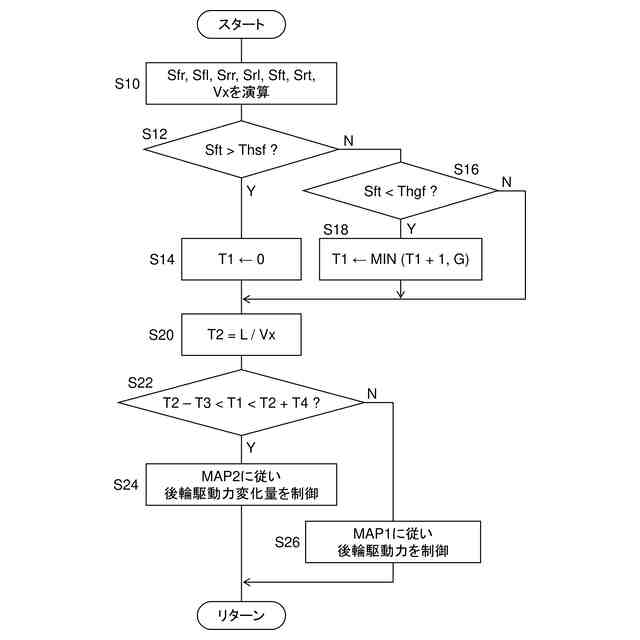
図3の制御装置の処理を示すフローチャートである。
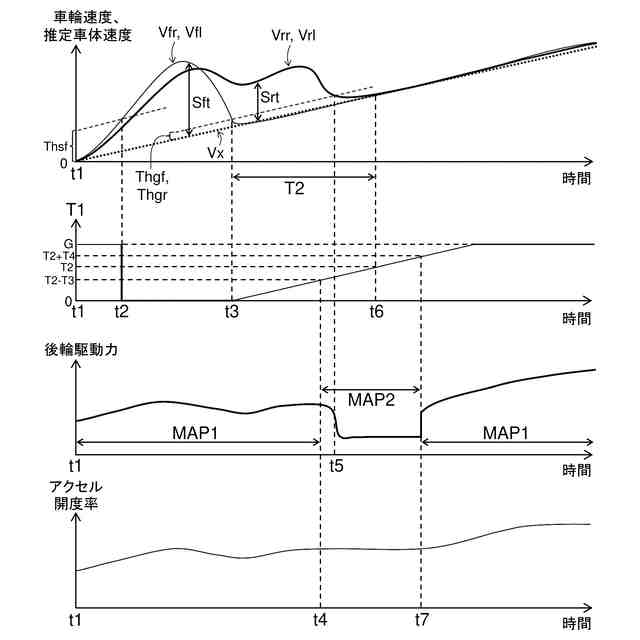
図1の車両が加速しながら低μ路から高μ路に乗り移るときの車輪速度、推定車体速度、経過時間、後輪駆動力、およびアクセル開度率を示す図である。
【発明を実施するための形態】
【0009】
図1は、実施の形態の車両1の構成を概略的に示す。車両1は、前輪と後輪とが独立して駆動される四輪駆動車である。車両1は、プロペラシャフトを備えず、前後独立に駆動力源を備える。車両1は、運転者が運転する車両である一例を説明するが、車両1は自動運転車両であってもよい。
【0010】
車両1は、第1駆動装置10、第2駆動装置12、左前輪14fl、右前輪14fr、左後輪14rl、右後輪14rr、左前輪速度センサ16fl、右前輪速度センサ16fr、左後輪速度センサ16rl、右後輪速度センサ16rr、アクセルペダルセンサ18、および制御装置20を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
設置部材
1か月前
個人
骨組み型熱交換器
2か月前
個人
自動車暴走抑制装置
2か月前
個人
車内雨傘載置収納具
1か月前
個人
荷台雨除け装置
8日前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
2か月前
東レ株式会社
フロントグリル
2か月前
株式会社タイヨー産業
補助枕
1か月前
個人
キャンピングトレーラー
23日前
日本精機株式会社
表示システム
1か月前
個人
全自動解除式シートベルト
13日前
株式会社豊田自動織機
電動車両
14日前
井関農機株式会社
作業車両
1日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
28日前
株式会社SUBARU
車両
2か月前
井関農機株式会社
作業車両
1日前
株式会社SUBARU
車両
2か月前
トヨタ自動車株式会社
車両
1か月前
株式会社SUBARU
車両
2か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
2日前
トヨタ自動車株式会社
車両
3か月前
株式会社コーワ
フィルター清掃装置
6日前
個人
テーブル付きハンドルガード具
9日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1か月前
新明和工業株式会社
荷箱の天蓋装置
2か月前
株式会社ニフコ
カップホルダ
1か月前
株式会社コーワ
フィルター清掃装置
20日前
カヤバ株式会社
シリンダ装置
2か月前
個人
視認ペダル操作システム
20日前
オムロン株式会社
表示システム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ