TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024085261
公報種別
公開特許公報(A)
公開日
2024-06-26
出願番号
2022199698
出願日
2022-12-14
発明の名称
組立システム、制御方法、およびプログラム
出願人
三菱重工業株式会社
,
学校法人早稲田大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20240619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】より円滑に締結することができる。
【解決手段】組立システムは、複数の関節部を有するアームと、アームによって移動され、ナットを保持して回転させるエンドエフェクタと、各関節部の関節角を取得する第1センサと、対象物に設けられたボルトにナットが接触した場合に、伝達された接触力及びトルクを取得する第2センサとを有するマニピュレータと、制御装置とを備える。制御装置は、各関節部の関節角と、接触力及びトルクとを所定周期で取得し、各関節部の関節角に基づきナットの位置座標及び姿勢角を算出し、第1時刻でのナットの位置座標及び姿勢角と、第1時刻での接触力及びトルクとが入力されると、ナットがボルトに締結された状態を示す目標位置座標及び目標姿勢角に近づいた、第1時刻よりも後の第2時刻でのナットの位置座標及び姿勢角を示す指令値を出力するように学習された学習済みモデルを用いて、エンドエフェクタを制御する。
【選択図】図7
特許請求の範囲
【請求項1】
複数の関節部を有するアームと、
前記アームによって移動されるとともに、ナットを保持して前記ナットを軸線回りに回転させるエンドエフェクタと、
各々の前記関節部の関節角を取得する第1センサと、
施工対象物に設けられたボルトに前記ナットが接触した場合に、前記エンドエフェクタから伝達された接触力およびトルクを取得する第2センサと、
を有するマニピュレータと、
前記マニピュレータを制御する制御装置と、
を備え、
前記制御装置は、
各々の前記関節部の関節角と、前記接触力およびトルクとを第1所定周期で取得する取得部と、
前記取得された各々の前記関節部の関節角に基づき、前記ナットの位置座標および姿勢角を算出する算出部と、
第1時刻における前記ナットの位置座標および姿勢角と、前記第1時刻における前記接触力およびトルクとが入力されると、前記ナットが前記ボルトに締結された状態を示す前記ナットの目標位置座標および目標姿勢角に近づいた、前記第1時刻よりも後の第2時刻における前記ナットの位置座標および姿勢角を示す指令値を出力するように学習された第1学習済みモデルを用いて、前記エンドエフェクタを制御する制御部と、
を備える組立システム。
続きを表示(約 2,000 文字)
【請求項2】
前記第1学習済みモデルは、
前記ナットの前記目標位置座標および目標姿勢角から、ランダムに与えられた量外れた前記ナットの既知位置座標および既知姿勢角が、前記目標位置座標および目標姿勢角になるように前記エンドエフェクタを制御する教示動作中に取得された複数の前記ナットの位置座標および姿勢角と、
各々の前記ナットの位置座標および姿勢角が取得された時刻に対応する前記接触力およびトルクと、
を含む教師データセットが入力される学習ステップが繰り返し実行されたことで、前記入力に応じた前記指令値を出力するように学習されている
請求項1に記載の組立システム。
【請求項3】
前記エンドエフェクタに設けられ、前記施工対象物を撮像した画像を生成する撮像装置を更に備え、
前記取得部は、前記画像を第2所定周期で更に取得し、
前記制御部は、
前記ナットが前記ボルトに接触していない第1位置で前記取得された第3時刻における前記画像と、前記第3時刻における前記ナットの位置座標および姿勢角とが入力されると、前記ナットが前記ボルトに接触した第2位置に前記ナットが近づいた、前記第3時刻よりも後の第4時刻における前記ナットの位置座標および姿勢角を示す指令値を出力するように学習された第2学習済みモデルを用いて、前記エンドエフェクタを制御する
請求項1に記載の組立システム。
【請求項4】
前記第2学習済みモデルは、
前記第2位置から前記第1位置に前記エンドエフェクタを移動させるダイレクトティーチング動作中に取得された複数の前記画像と、
各々の前記画像が取得された時刻に対応する前記ナットの位置座標および姿勢角と、
を含む教師データセットが入力される学習ステップが繰り返し実行されたことで、前記入力に応じた前記指令値を出力するように学習されている
請求項3に記載の組立システム。
【請求項5】
前記制御部は、
前記第2位置で前記取得された前記画像と、前記画像が取得された時刻に対応する前記ナットの位置座標および姿勢角と、前記画像が取得された時刻に対応する前記接触力およびトルクとが入力されると、前記ナットおよび前記ボルトの螺合の成否を示す判定結果を出力するように学習された第3学習済みモデルを用いて、前記エンドエフェクタを制御する
請求項3または請求項4に記載の組立システム。
【請求項6】
前記ナットの位置座標は、前記マニピュレータが持つ原点に準拠した世界座標系で表現されており、
前記制御装置は、前記算出された前記ナットの位置座標を前記世界座標系からボルト中心座標系に変換する座標変換部を更に備え、
前記制御部は、前記変換された前記ナットの位置座標を前記第1学習済みモデルに入力する
請求項1から請求項4のうちいずれか1項に記載の組立システム。
【請求項7】
前記制御装置は、前記取得された各々の前記関節部の関節角に基づく前記エンドエフェクタの自重に関する補正値を用いて、前記取得された前記接触力を補正する補正部を更に備え、
前記制御部は、前記補正された前記接触力を前記第1学習済みモデルに入力する
請求項1から請求項4のうちいずれか1項に記載の組立システム。
【請求項8】
前記第2センサは、各々の前記関節部が有するモータの電流値を取得可能な電流センサである
請求項1から請求項4のうちいずれか1項に記載の組立システム。
【請求項9】
前記マニピュレータが載置された台座部と、
前記台座部を前記施工対象物の周囲で移動可能にさせる移動機構と、
を更に備える
請求項1から請求項4のうちいずれか1項に記載の組立システム。
【請求項10】
前記エンドエフェクタは、
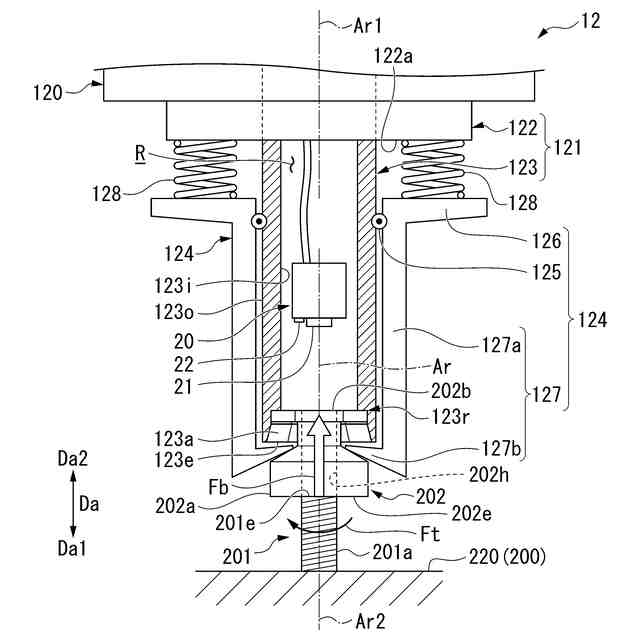
基部と、前記基部から延びるとともに前記軸線を中心とした筒状を成し、先端側に前記ナットの少なくとも一部を収容可能な収容部が形成されたソケット部とを有するナットランナと、
前記ソケット部の外周側に回動可能に固定されて前記軸線に交差する方向に延びる第1部分と、前記第1部分から前記先端側に延びる延在部および前記延在部の先端に設けられて前記軸線に近づくように前記延在部から突出することで前記ナットに当接する爪部を有する第2部分とを有するナット保持部材と、
前記基部と前記第1部分との間に設けられ、前記第1部分に対して前記先端側に向かう弾性力を付与する弾性部材と、
を有する
請求項3または請求項4に記載の組立システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、組立システム、制御方法、およびプログラムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
特許文献1には、ロボットが備えるエンドエフェクタのワークに対する接触状態の変化をセンサが検知し、当該センサが検知した接触状態の変化に基づき、ワークに対するエンドエフェクタのずれ量を推定して補正するロボットシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6870122号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記特許文献1に記載の技術では、エンドエフェクタの手探り動作によって生じたボルトの頭部に対するソケットの接触状態の変化に基づいてずれ量を補正しているに留まるため、人間が行うような締結動作の再現が難しい。そのため、例えば、ソケットにボルトの頭部がはまるまでに時間がかかる場合がある。したがって、より円滑に締結することができる組立技術が期待されている。
【0005】
本開示は上記課題を解決するためになされたものであって、より円滑に締結することができる組立システム、制御方法、およびプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本開示に係る組立システムは、複数の関節部を有するアームと、前記アームによって移動されるとともに、ナットを保持して前記ナットを軸線回りに回転させるエンドエフェクタと、各々の前記関節部の関節角を取得する第1センサと、施工対象物に設けられたボルトに前記ナットが接触した場合に、前記エンドエフェクタから伝達された接触力およびトルクを取得する第2センサと、を有するマニピュレータと、前記マニピュレータを制御する制御装置と、を備え、前記制御装置は、各々の前記関節部の関節角と、前記接触力およびトルクとを第1所定周期で取得する取得部と、前記取得された各々の前記関節部の関節角に基づき、前記ナットの位置座標および姿勢角を算出する算出部と、第1時刻における前記ナットの位置座標および姿勢角と、前記第1時刻における前記接触力およびトルクとが入力されると、前記ナットが前記ボルトに締結された状態を示す前記ナットの目標位置座標および目標姿勢角に近づいた、前記第1時刻よりも後の第2時刻における前記ナットの位置座標および姿勢角を示す指令値を出力するように学習された第1学習済みモデルを用いて、前記エンドエフェクタを制御する制御部と、を備える。
【0007】
本開示に係る制御方法は、複数の関節部を有するアームと、前記アームによって移動されるとともに、ナットを保持して前記ナットを軸線回りに回転させるエンドエフェクタと、各々の前記関節部の関節角を取得する第1センサと、前記エンドエフェクタから伝達された接触力およびトルクを取得する第2センサと、を有するマニピュレータを制御する制御方法であって、各々の前記関節部の関節角と、前記接触力およびトルクとを第1所定周期で取得するステップと、前記取得された各々の前記関節部の関節角に基づき、前記ナットの位置座標および姿勢角を算出するステップと、第1時刻における前記ナットの位置座標および姿勢角と、前記第1時刻における前記接触力およびトルクとが入力されると、前記ナットが前記ボルトに締結された状態を示す前記ナットの目標位置座標および目標姿勢角に近づいた、前記第1時刻よりも後の第2時刻における前記ナットの位置座標および姿勢角を示す指令値を出力するように学習された第1学習済みモデルを用いて、前記エンドエフェクタを制御するステップと、を実行する。
【0008】
本開示に係るプログラムは、複数の関節部を有するアームと、前記アームによって移動されるとともに、ナットを保持して前記ナットを軸線回りに回転させるエンドエフェクタと、各々の前記関節部の関節角を取得する第1センサと、前記エンドエフェクタから伝達された接触力およびトルクを取得する第2センサと、を有するマニピュレータを制御する制御装置のコンピュータに、各々の前記関節部の関節角と、前記接触力およびトルクとを第1所定周期で取得するステップと、前記取得された各々の前記関節部の関節角に基づき、前記ナットの位置座標および姿勢角を算出するステップと、第1時刻における前記ナットの位置座標および姿勢角と、前記第1時刻における前記接触力およびトルクとが入力されると、前記ナットが前記ボルトに締結された状態を示す前記ナットの目標位置座標および目標姿勢角に近づいた、前記第1時刻よりも後の第2時刻における前記ナットの位置座標および姿勢角を示す指令値を出力するように学習された第1学習済みモデルを用いて、前記エンドエフェクタを制御するステップと、を実行させる。
【発明の効果】
【0009】
本開示によれば、より円滑に締結することができる組立システム、制御方法、およびプログラムを提供することができる。
【図面の簡単な説明】
【0010】
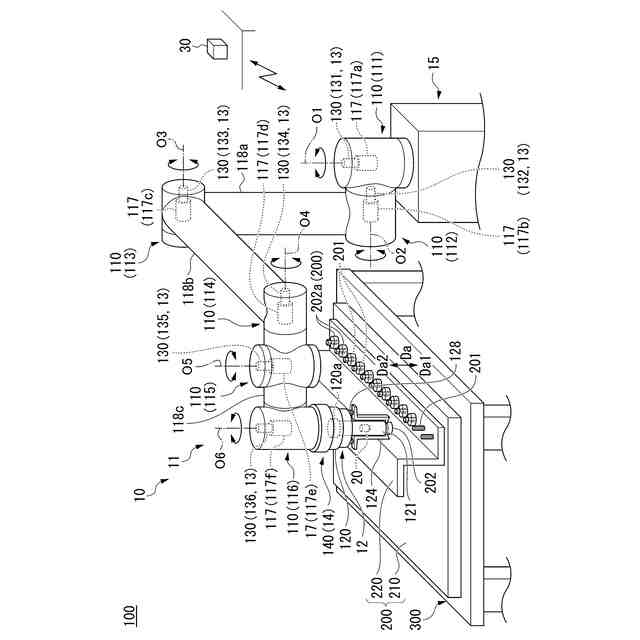
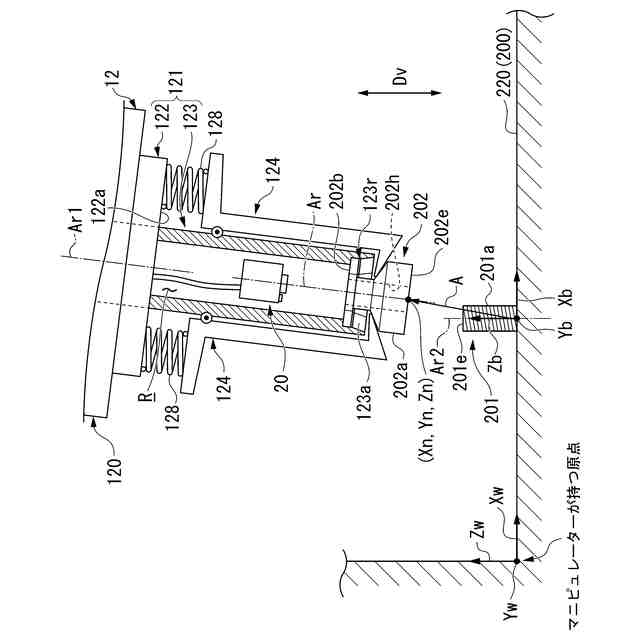
本開示の第1実施形態に係る組立システムの全体を示す概略構成図である。
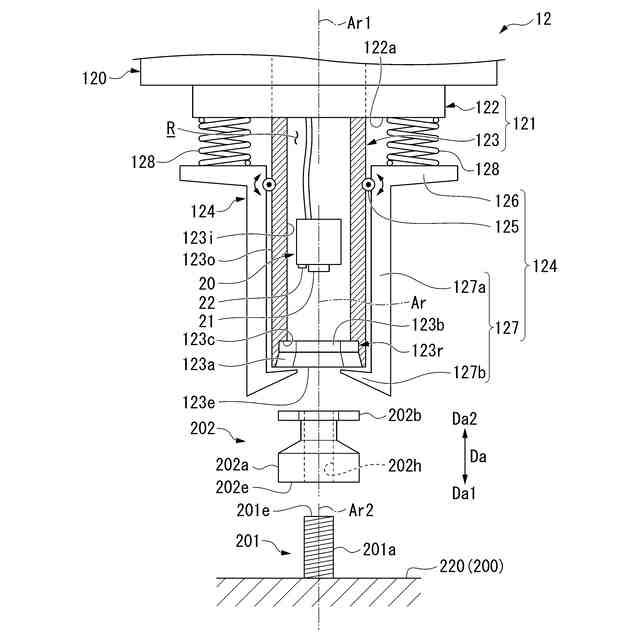
本開示の第1実施形態に係るエンドエフェクタ、ナット、およびボルトを一列に並べて表示した図である。
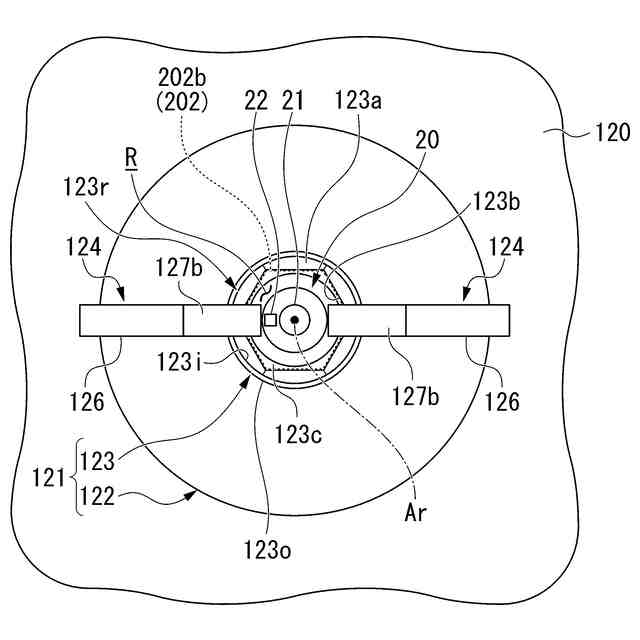
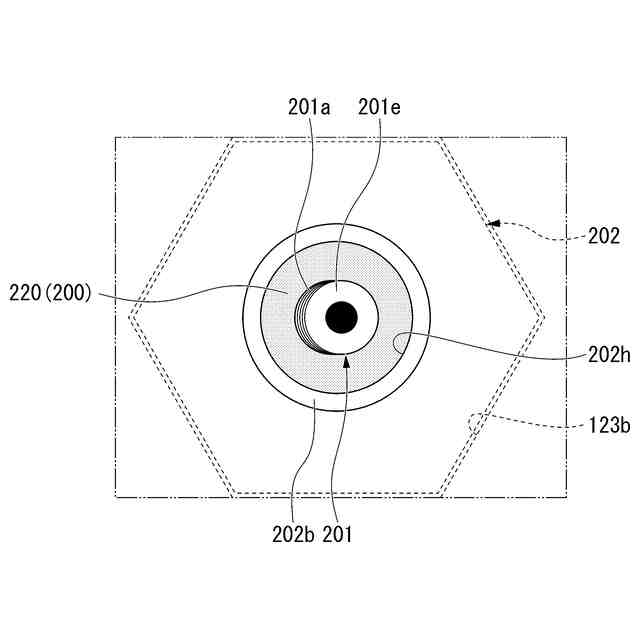
本開示の第1実施形態に係るナットランナの内部を軸線方向から見た図である。
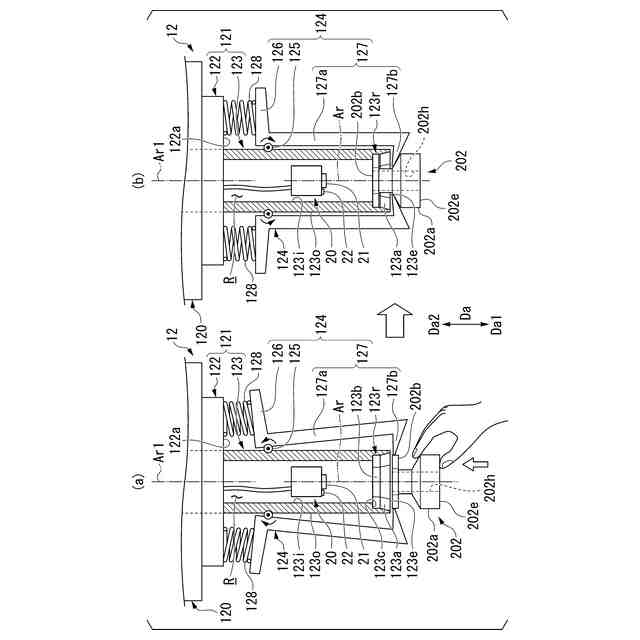
本開示の第1実施形態に係るエンドエフェクタにナットを保持させる際のナット保持部材の動きを説明するための図である。
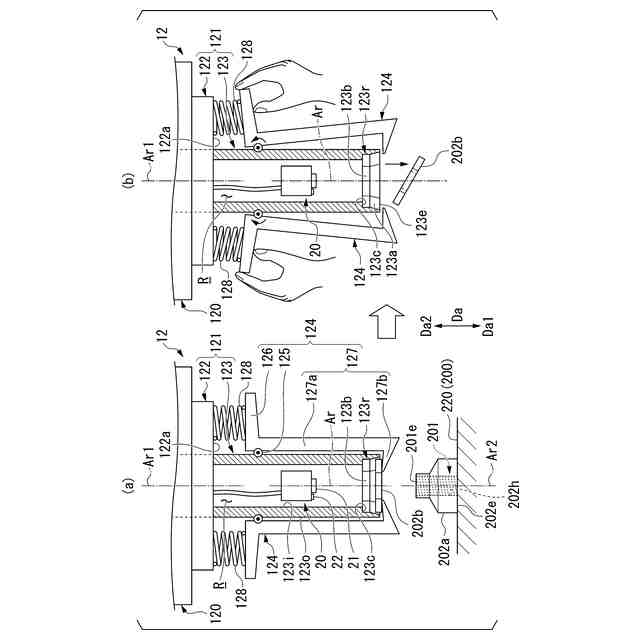
本開示の第1実施形態に係るエンドエフェクタからカラーを取り外す際のナット保持部材の動きを説明するための図である。
本開示の第1実施形態に係る撮像装置が撮像した画像の一例を模式的に示す図である。
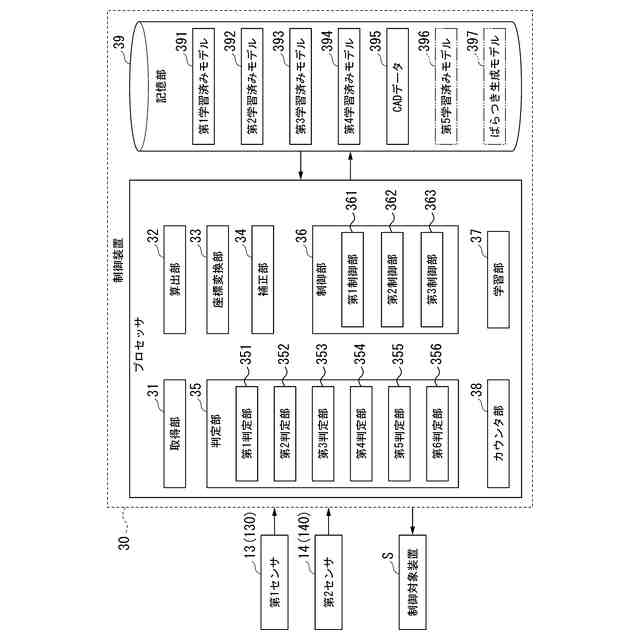
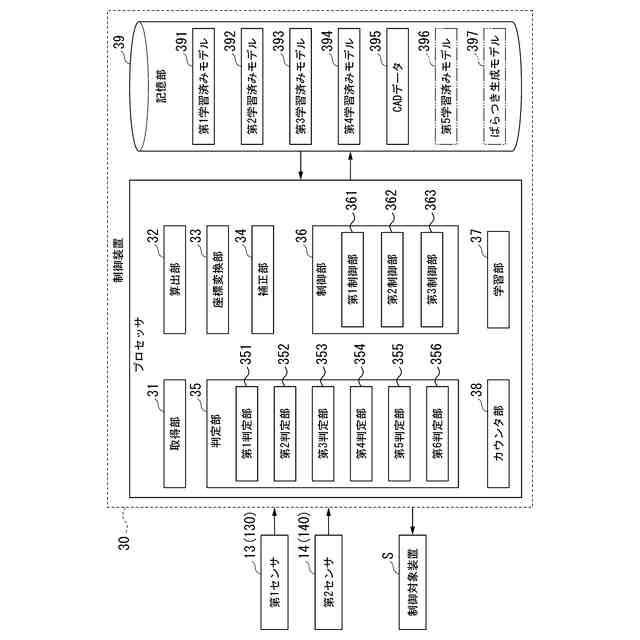
本開示の第1実施形態に係る制御装置の機能ブロック図である。
本開示の第1実施形態に係るナットの位置座標が表現される座標系を概念的に説明するための図である。
本開示の第1実施形態に係るエンドエフェクタが保持したナットがボルトに接触した際にボルトから受ける接触力を概念的に説明するための図である。
本開示の第1実施形態に係る補正部が接触力の補正に用いる補正値を概念的に説明するための図である。
本開示の第1実施形態に係る第1学習済みモデルの学習ステップの一例を示すフローチャートである。
本開示の第1実施形態に係る第2学習済みモデルを教示する際のダイレクトティーチング動作の一例を示す図である。
本開示の第1実施形態に係る制御装置の動作の一例を示すフローチャートである。
本開示の第2実施形態に係る組立システムの全体を示す概略構成図である。
本開示の第3実施形態に係る組立システムの全体を示す概略構成図である。
本開示の第3実施形態の変形例に係る組立システムの全体を示す概略構成図である。
本開示の実施形態に係るコンピュータの構成を示すハードウェア構成図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
個人
ペットボトル用蓋開け具。
8か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
7か月前
株式会社ツノダ
挟持工具
4か月前
日東工器株式会社
衝撃工具
2日前
株式会社右川ゴム製造所
把持装置
2か月前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
罫書用治具
19日前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
関節機構
6か月前
株式会社不二越
ロボット
8か月前
トヨタ自動車株式会社
関節機構
7か月前
株式会社マキタ
動力工具
1か月前
トヨタ自動車株式会社
ハンド構造
9日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
作業台
7か月前
個人
プーリーキー抜き治具
3か月前
オムロン株式会社
ロボットハンド
8か月前
東京都公立大学法人
ロボットハンド
1か月前
株式会社不二越
予測システム
4か月前
CKD株式会社
電動把持装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
5か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
株式会社ダイヘン
画像生成装置
2か月前
株式会社共和製作所
ロボット用アーム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































