TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024085231
公報種別
公開特許公報(A)
公開日
2024-06-26
出願番号
2022199647
出願日
2022-12-14
発明の名称
搬送装置
出願人
株式会社イシダ
代理人
弁理士法人新樹グローバル・アイピー
主分類
B25J
13/08 20060101AFI20240619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】種類によって形状や大きさが異なるツールを用いても、識別コードを検知して取り付けられたツールを特定できる搬送装置を提供する。
【解決手段】搬送装置は、ツールと、ロボットと、識別媒体と、検知部と、記憶部と、制御部とを備える。ツールは、物品を把持する。ロボットは、交換可能に取り付けられたツールを介して物品を搬送する。識別媒体は、ツールの種類ごとに所定の取付位置に取り付けられた識別コードを有する。検知部は、識別媒体から識別コードを検出する。記憶部は、物品の種類ごとに、把持に用いられるツールの種類に対応するツール情報及び取付位置に関する位置情報が関連付けられた第1情報が記録される。制御部は、検知部が識別コードを検知できるように、位置情報に基づいてツール又は検知部を移動させ、検知部が検知した識別コードが第1情報のツール情報と一致すると、ロボットによる物品の搬送を許可する。
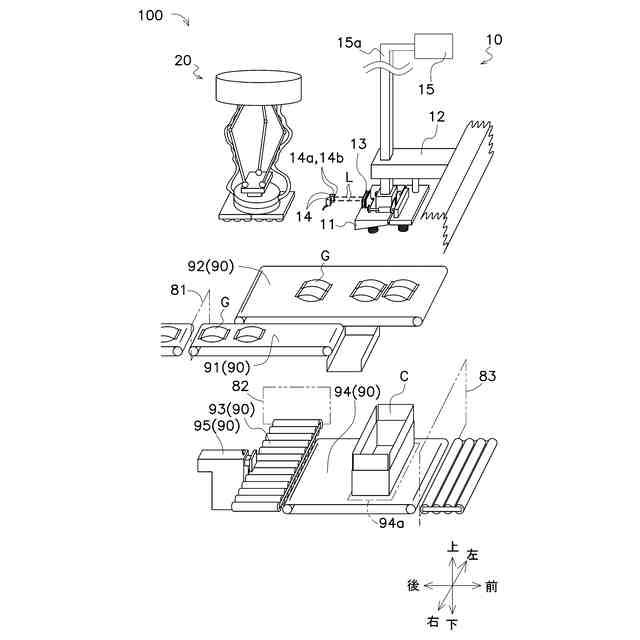
【選択図】図2
特許請求の範囲
【請求項1】
物品を把持するツールと、
前記ツールが交換可能に取り付けられ、前記ツールを介して前記物品を搬送するロボットと、
前記ツールの種類ごとに前記ツールの所定の取付位置に取り付けられ、前記ツールの種類を識別するための識別コードを有する識別媒体と、
前記識別媒体から前記識別コードを検出する検知部と、
前記物品の種類ごとに、把持に用いられる前記ツールの種類に対応するツール情報及び前記取付位置に関する位置情報が関連付けられた第1情報が記録された記憶部と、
前記ロボットを制御する制御部とを備え、
前記制御部は、
前記検知部が前記識別コードを検知できるように、前記位置情報に基づいて前記ツール又は前記検知部を移動させ、
前記検知部が検知した前記識別コードが前記第1情報の前記ツール情報と一致すると、前記ロボットによる前記物品の搬送を許可する、
搬送装置。
続きを表示(約 380 文字)
【請求項2】
前記識別媒体は、
開放状態及び閉塞状態のいずれかの状態にある複数の孔の組み合わせで前記識別コードを構成し、
前記検知部は、
前記識別コードに光を照射する照射部と、
前記孔を通過し前記識別媒体で反射した前記光を受光する受光部と
を有する、
請求項1に記載の搬送装置。
【請求項3】
前記閉塞状態は、
前記孔にピンが挿入された状態である、
請求項2に記載の搬送装置。
【請求項4】
ブロアホースを介して空気を吸引し、前記ツールに前記物品を把持させる負圧発生部をさらに備える、
請求項1に記載の搬送装置。
【請求項5】
前記ロボットは、
前記物品を箱に収容する、
請求項1から4のいずれかに記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
この開示は、搬送装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
物品を把持するツール(把持部)と、ツールを介して物品を搬送するロボットとを備えた搬送装置が知られている。特許文献1(特開2022-41753号公報)は、交換可能に取り付けられたツールの重量を検出する重量検出部と、各ツールの重量に関する情報が記録された記憶部とを有するロボットを開示する。特許文献1が開示するロボットは、重量検出部が検出した重量と記憶部に記録された重量に関する情報とに基づいて、ロボットに取り付けられたツールの種類を特定する。
【発明の概要】
【発明が解決しようとする課題】
【0003】
特許文献1が開示するロボットは、重量が同じ又は近いツールどうしを区別することが困難な場合がある。これを避けるため、ツールに取り付けた識別媒体に記録されたツールの種類を示す識別コードを検知部で検知し、検知された識別コードを記憶装置に予め記録されたツール情報と比較することで、ロボットに取り付けられたツールの種類を特定する方法がある。しかしながら、この方法の場合、形状や大きさが種類によって異なるツールが用いられる場合は、ツールの同じ位置に識別媒体が取り付けられるとは限らず、検知部による識別コードの検知が困難となることがあった。
【0004】
本開示は、種類によって形状や大きさが異なるツールを用いても、識別コードを検知して取り付けられたツールを特定できる搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
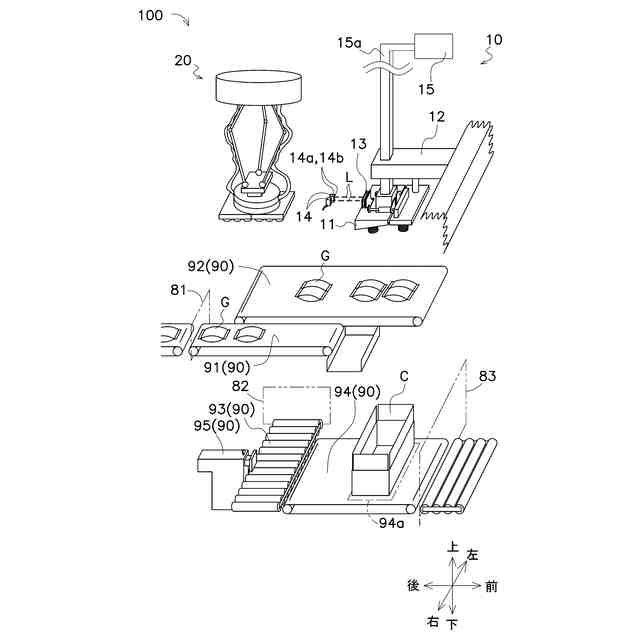
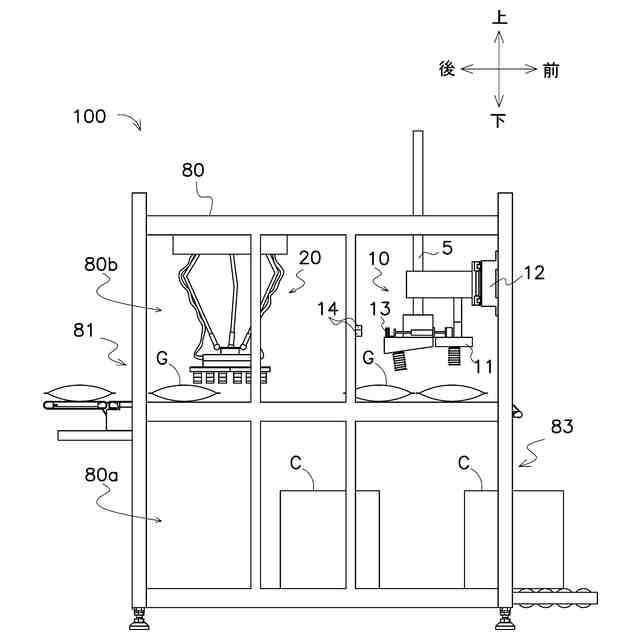
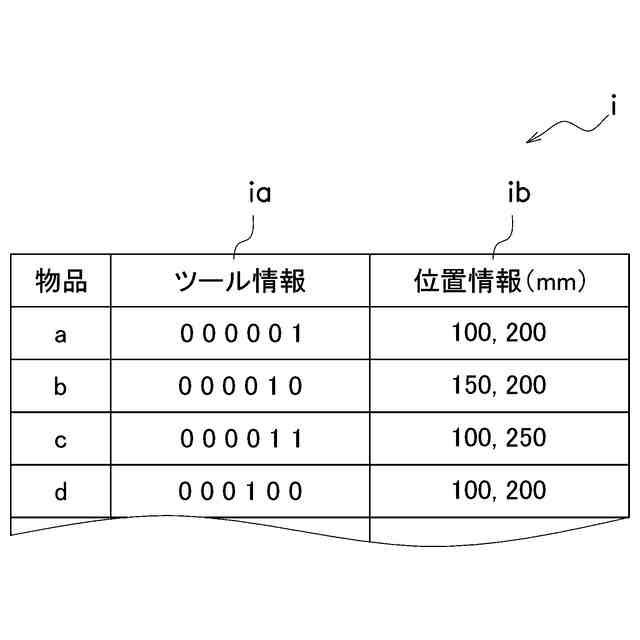
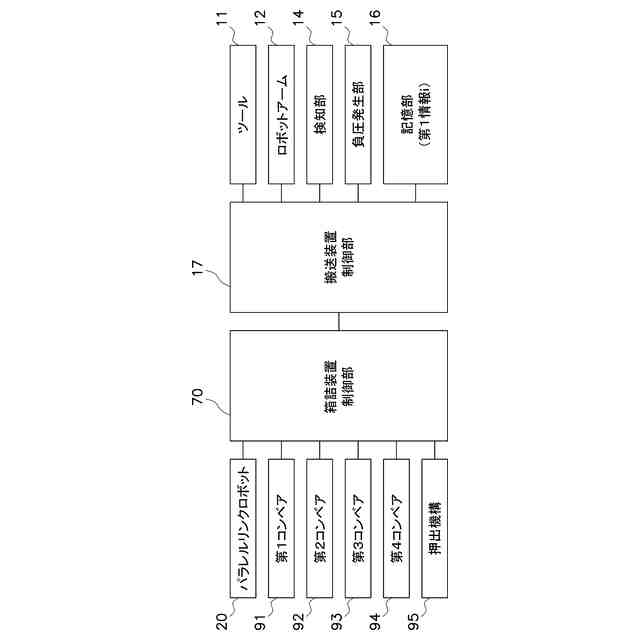
第1観点の搬送装置は、ツールと、ロボットと、識別媒体と、検知部と、記憶部と、制御部とを備える。ツールは、物品を把持する。ロボットは、ツールが交換可能に取り付けられ、ツールを介して物品を搬送する。識別媒体は、ツールの種類ごとに所定の取付位置に取り付けられ、ツールの種類を識別するための識別コードを有する。検知部は、識別媒体から識別コードを検出する。記憶部は、物品の種類ごとに、把持に用いられるツールの種類に対応するツール情報及び取付位置に関する位置情報が関連付けられた第1情報が記録される。制御部は、ロボットを制御する。
【0006】
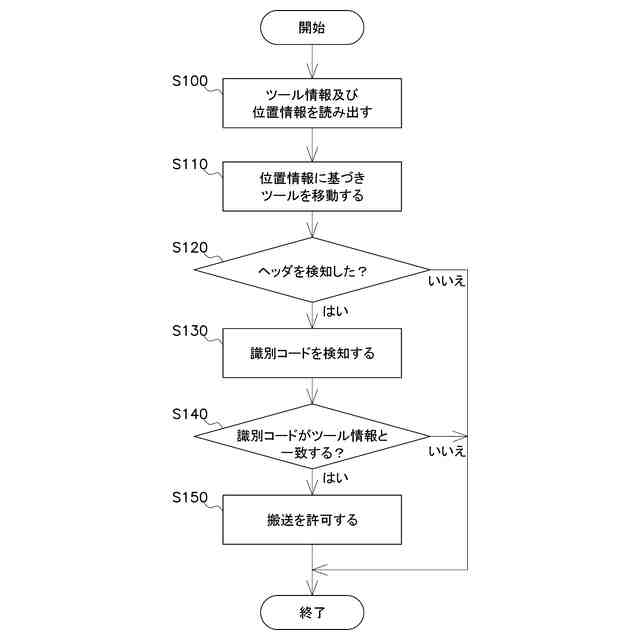
制御部は、検知部が識別コードを検知できるように、位置情報に基づいてツール又は検知部を移動させ、検知部が検知した識別コードが第1情報のツール情報と一致すると、ロボットによる物品の搬送を許可する。
【0007】
第1観点の搬送装置は、物品の種類に関連付けられたツール情報及び位置情報を読み出し、位置情報に基づいてツール又は検知部を移動させた後、検知した識別コードがツール情報と一致するか否かを判断する。このため、識別媒体が取付けられる位置がツールの種類ごとに異なっていても、ツール又は検知部を移動させることで、確実に検知部による識別コードの検知を行える。したがって、第1観点の搬送装置は、種類によって形状や大きさが異なるツールを用いても、識別コードを検知して取り付けられたツールを特定できる。
【0008】
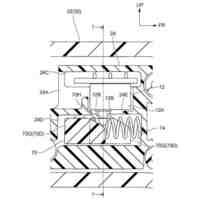
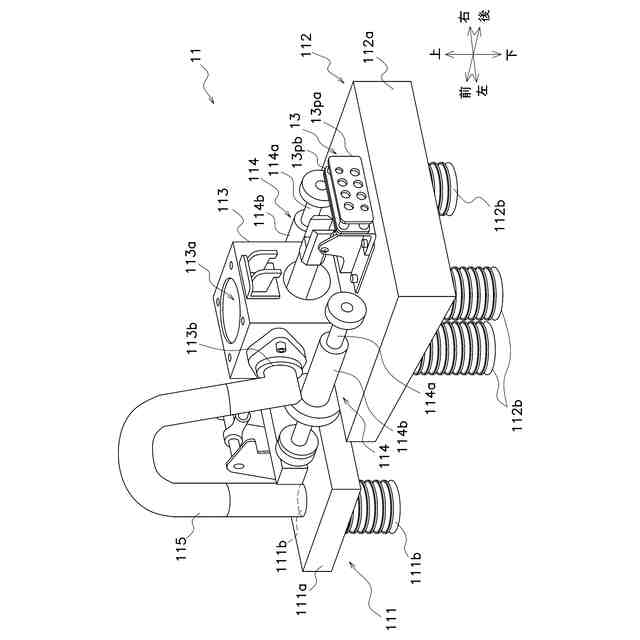
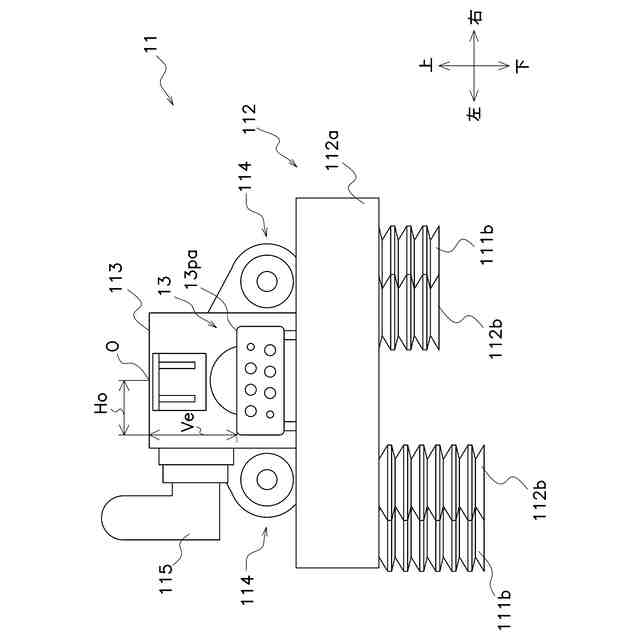
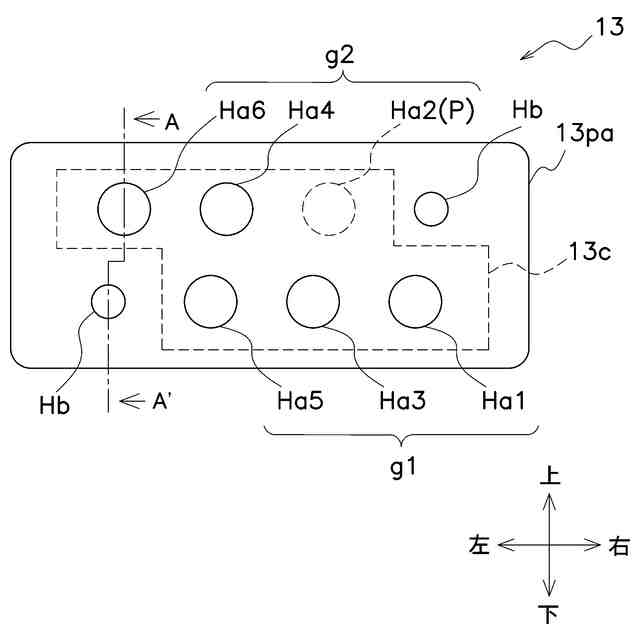
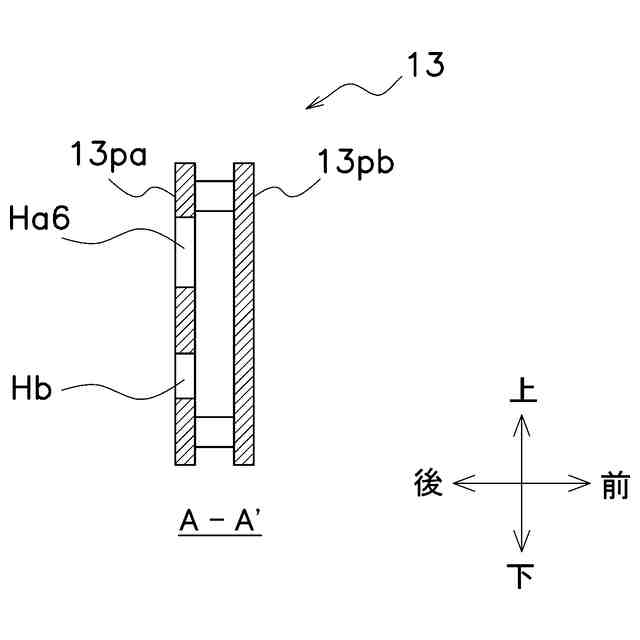
第2観点の搬送装置は、第1観点の搬送装置であって、識別媒体が、開放状態及び閉塞状態のいずれかの状態にある複数の孔の組み合わせで識別コードを構成する。検知部は、照射部と、受光部とを有する。照射部は、識別コードに光を照射する。受光部は、孔を通過し識別媒体で反射した光を受光する。
【0009】
第2観点の搬送装置では、識別コードが複数の孔の組み合わせという単純な構造で構成される。したがって、第2観点の搬送装置によれば、装置の製造コストが抑制される。
【0010】
第3観点の搬送装置は、第1観点または第2観点の搬送装置であって、閉塞状態が、孔にピンが挿入された状態である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
株式会社ツノダ
挟持工具
3か月前
日東工器株式会社
衝撃工具
4日前
株式会社右川ゴム製造所
把持装置
3か月前
川崎重工業株式会社
ハンド
4か月前
個人
ロボットシステム
6か月前
株式会社不二越
ロボット
6か月前
学校法人立命館
グリッパ
3か月前
株式会社マキタ
動力工具
1か月前
川崎重工業株式会社
罫書用治具
21日前
学校法人立命館
ロボットハンド
3か月前
トヨタ自動車株式会社
関節機構
6か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
11日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
CKD株式会社
電動把持装置
2か月前
宮川工機株式会社
板状部品移動装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
株式会社不二越
予測システム
4か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
工機ホールディングス株式会社
作業機
20日前
株式会社ダイヘン
情報処理装置
3か月前
株式会社ダイヘン
画像生成装置
3か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
6か月前
工機ホールディングス株式会社
作業機
6か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ