TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024084504
公報種別
公開特許公報(A)
公開日
2024-06-25
出願番号
2022198813
出願日
2022-12-13
発明の名称
ロボットハンド
出願人
株式会社ブリヂストン
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
15/08 20060101AFI20240618BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】把持状態を正しく判定することが可能なロボットハンドを提供することを目的とする。
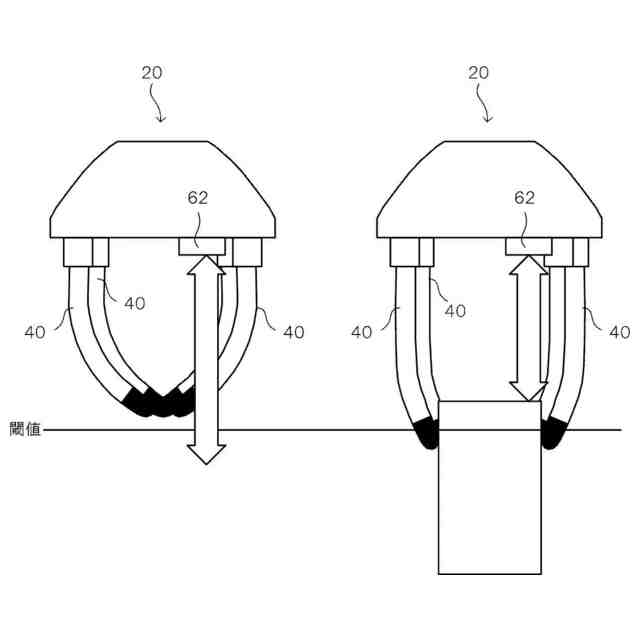
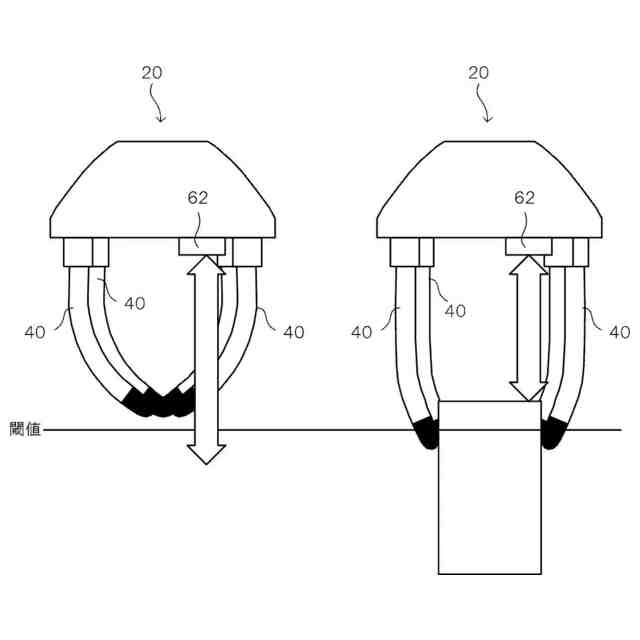
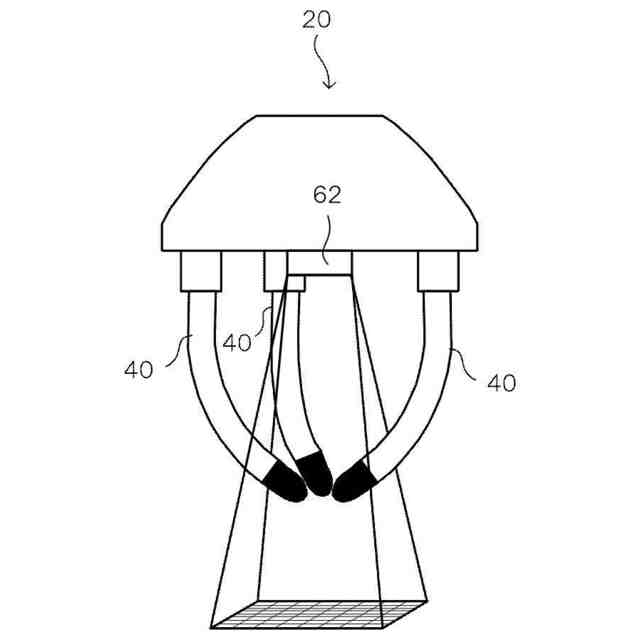
【解決手段】湾曲する動作を行う流体圧アクチュエータで構成された複数の指部材40を備えたロボットハンド20において、指部材40が移動する軌道から外れた位置を検出する位置に検出部62を配置する。これにより、検出部62が指部材40を検出することがなくなるため、指部材40を誤検出することなく、把持対象物の把持を正しく判定することが可能となる。
【選択図】図5
特許請求の範囲
【請求項1】
把持対象物を把持する方向へ移動可能な複数の指部材と、
前記指部材が移動する軌跡から外れた位置を検出対象として、距離を検出する検出部と、
を備えたロボットハンド。
続きを表示(約 350 文字)
【請求項2】
前記指部材は、湾曲する動作を行う流体圧アクチュエータである請求項1に記載のロボットハンド。
【請求項3】
前記検出部を複数備え、複数の前記検出部は、前記指部材が移動する軌跡から外れた位置で、かつそれぞれ異なる位置を検出対象として、距離を検出する請求項1に記載のロボットハンド。
【請求項4】
前記検出部は、複数の領域を検出し、前記複数の領域のうち、前記指部材が移動する軌跡から外れた領域を検出対象とする請求項1に記載のロボットハンド。
【請求項5】
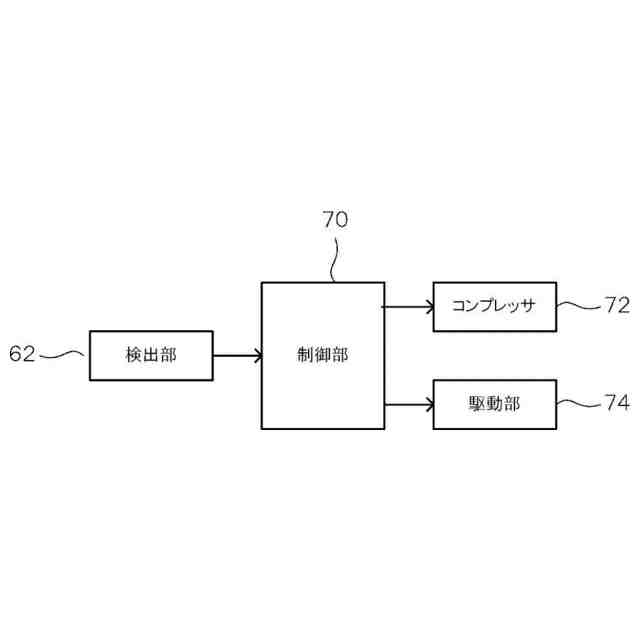
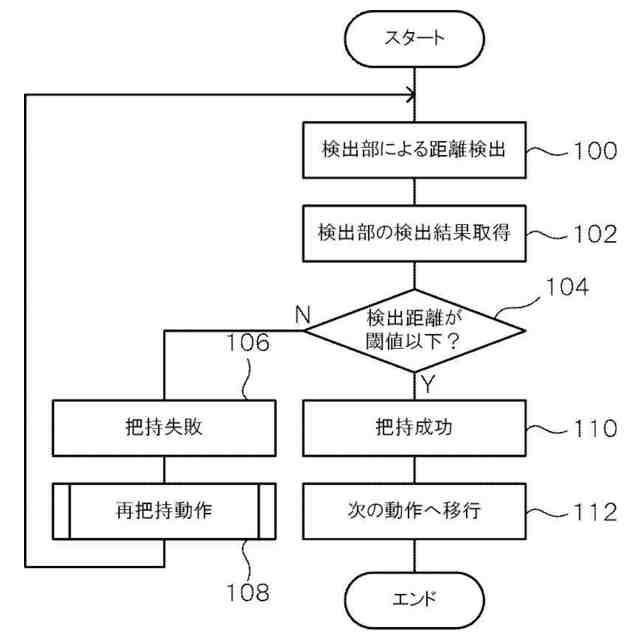
前記検出部の検出結果に基づいて、把持対象物を把持したか否かを判定し、把持したと判定した場合に、前記把持対象物を移動する制御を行う制御部を更に備えた請求項1に記載のロボットハンド。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットハンドに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
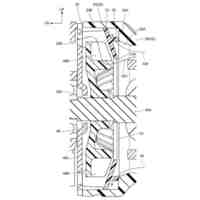
特許文献1には、流体の圧力によって膨張及び収縮する円筒状のチューブと、所定方向に配向された繊維コードを編み込んだ伸縮性を有する構造体であり、チューブの外周面を覆うスリーブと、チューブの軸方向における端部を封止する封止部材と、スリーブの内側において、チューブの軸方向における一端側から他端側に亘って設けられる拘束部材を備え、拘束部材が、チューブの軸方向に沿った圧縮に対して抵抗し、軸方向に直交する直交方向に変形可能である液体圧アクチュエータを複数用いて、ヒトの指に似た挙動を実現し得る把持システムが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-88999号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
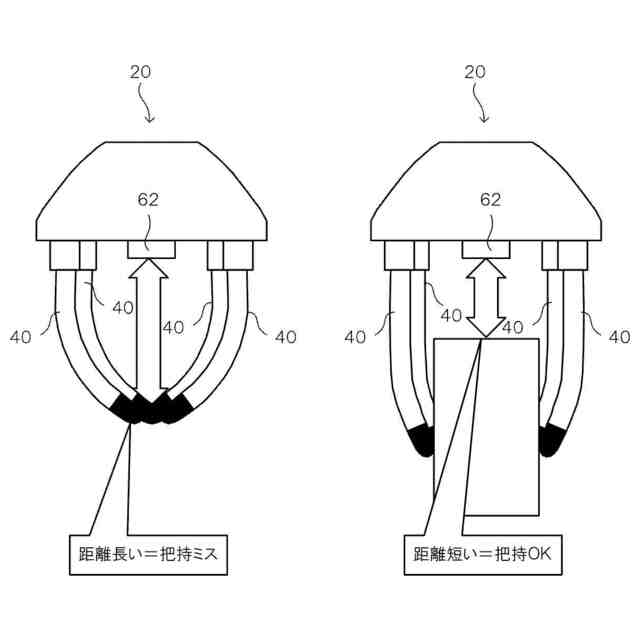
把持対象物を把持可能なロボットハンドでは、手のひらに対応する部分にセンサ等の検出部を配置して、把持対象物を正しく把持できているかを確認してから次の動作に移行する必要がある。
【0005】
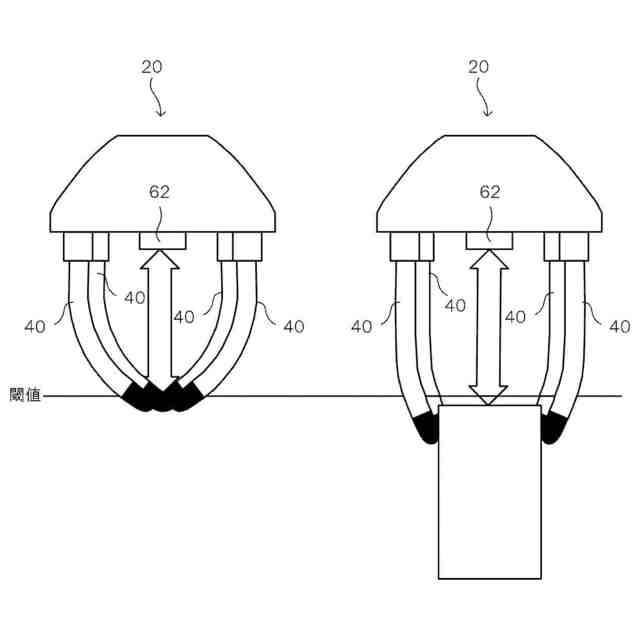
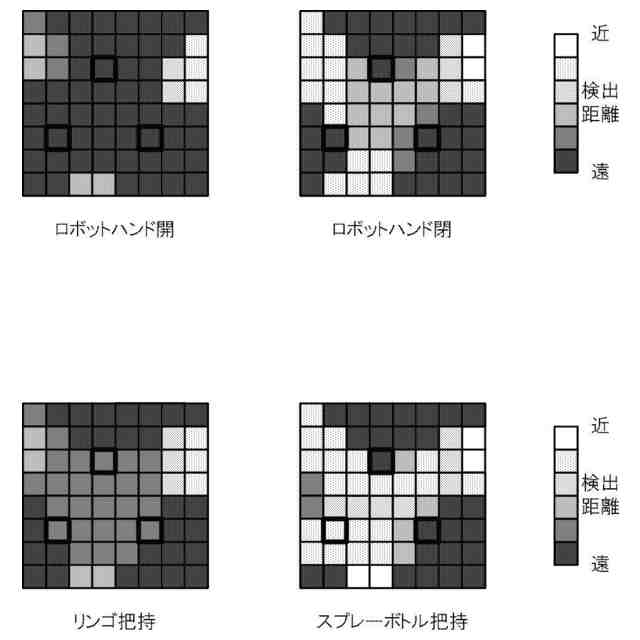
しかしながら、光学式の検出部を用いた場合、ロボットハンドを把持する動作を行うときに、検出位置によっては、ロボットハンドの指部材を検出してしまい、正しく把持された状態と、把持できていない状態とを切り分けて判定することが難しい場合がある。特に、特許文献1の技術のように、湾曲型のロボットハンドでは、把持対象物に指が沿うため、把持対象物の位置関係が同じ位置にならない場合があり、正しく把持状態を判定できないことがある。
【0006】
本開示は、把持状態を正しく判定することが可能なロボットハンドを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、第1態様に係るロボットハンドは、把持対象物を把持する方向へ移動可能な複数の指部材と、前記指部材が移動する軌跡から外れた位置を検出対象として、距離を検出する検出部と、を備える。
【0008】
第2態様に係るロボットハンドは、第1態様に係るロボットハンドにおいて、前記指部材は、湾曲する動作を行う流体圧アクチュエータである。
【0009】
第3態様に係るロボットハンドは、第1態様又は第2態様に係るロボットハンドにおいて、前記検出部を複数備え、複数の前記検出部は、前記指部材が移動する軌跡から外れた位置で、かつそれぞれ異なる位置を検出対象として、距離を検出する。
【0010】
第4態様に係るロボットハンドは、第1態様又は第2態様に係るロボットハンドにおいて、前記検出部は、複数の領域を検出し、前記複数の領域のうち、前記指部材が移動する軌跡から外れた領域を検出対象とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
7か月前
川崎重工業株式会社
ハンド
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
日東工器株式会社
衝撃工具
8日前
個人
ロボットシステム
6か月前
トヨタ自動車株式会社
関節機構
7か月前
株式会社不二越
ロボット
6か月前
川崎重工業株式会社
罫書用治具
25日前
学校法人立命館
ロボットハンド
4か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
関節機構
6か月前
株式会社マキタ
動力工具
1か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
15日前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
作業台
7か月前
CKD株式会社
電動把持装置
2か月前
株式会社不二越
予測システム
4か月前
東京都公立大学法人
ロボットハンド
1か月前
国立大学法人山形大学
二重関節機構
1か月前
宮川工機株式会社
板状部品移動装置
1か月前
個人
スロープバリビス-ビス&-ドライバー
1か月前
工機ホールディングス株式会社
作業機
5か月前
小倉クラッチ株式会社
ロボットハンド
6か月前
株式会社越智工業所
ブレーカ用カバー
6か月前
工機ホールディングス株式会社
作業機
5か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ