TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024083654
公報種別
公開特許公報(A)
公開日
2024-06-24
出願番号
2022197573
出願日
2022-12-12
発明の名称
ロボットシステム、操作感調整方法及び操作感調整プログラム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
B25J
3/00 20060101AFI20240617BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】バイラテラル制御を行うマスタースレーブ方式のロボットシステムにおいて、操作感を向上させる。
【解決手段】ロボットシステム1は、操作部23を有するマスターロボット2と、研磨工具41及びワークWの一方を保持するスレーブロボット3と、スレーブロボット3に掛かる力の情報を操作者Hにフィードバックさせる制御装置5と、を備える。制御装置5は、研磨工具41とワークWとの距離Dに基づいて、操作者Hに与える操作感を変更する。
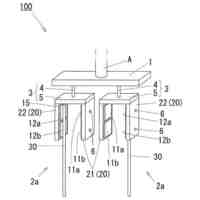
【選択図】図3
特許請求の範囲
【請求項1】
操作部を有するマスターロボットと、
加工工具及び被加工物の一方を保持するスレーブロボットと、
前記スレーブロボットに掛かる力の情報を操作者にフィードバックさせる制御手段と、
を備え、
前記制御手段は、前記加工工具と前記被加工物との距離に基づいて、前記操作者に与える操作感を変更する、
ロボットシステム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御手段は、前記加工工具と前記被加工物との距離が近づくに連れて、前記操作部の操作抵抗が大きくなるように、前記操作感を与えるための操作反力を前記操作部に発生させる、
請求項1に記載のロボットシステム。
【請求項3】
前記制御手段は、前記操作感を与えるための操作反力として、前記加工工具と前記被加工物との相対速度に比例した力を前記操作部に発生させる、
請求項1に記載のロボットシステム。
【請求項4】
前記制御手段は、前記操作感を与えるための操作反力を、前記加工工具と前記被加工物との相対速度のうち前記加工工具と前記被加工物とが近接する方向に沿った速度成分に比例させる、
請求項3に記載のロボットシステム。
【請求項5】
前記制御手段は、前記操作者の操作に基づいて、前記操作感を与えるための操作反力の大きさを調整可能に構成されている、
請求項1に記載のロボットシステム。
【請求項6】
前記制御手段は、前記操作感を与えるための操作反力を、前記距離に対して不連続に変化させる、
請求項1に記載のロボットシステム。
【請求項7】
前記制御手段は、
前記加工工具と前記被加工物との距離が所定の閾値よりも小さい場合に、前記操作感を与えるための操作反力を前記操作部に発生させ、
前記被加工物の大きさに応じて前記所定の閾値を変更する、
請求項1に記載のロボットシステム。
【請求項8】
操作部を有するマスターロボットと、加工工具及び被加工物の一方を保持するスレーブロボットと、前記スレーブロボットに掛かる力の情報を操作者にフィードバックさせる制御手段と、を備えるロボットシステムの操作感調整方法であって、
制御装置が、
前記加工工具と前記被加工物との距離を算出する工程と、
前記加工工具と前記被加工物との距離に基づいて、前記操作者に与える操作感を変更する工程と、
を実行する操作感調整方法。
【請求項9】
操作部を有するマスターロボットと、加工工具及び被加工物の一方を保持するスレーブロボットと、前記スレーブロボットに掛かる力の情報を操作者にフィードバックさせる制御手段と、を備えるロボットシステムの操作感調整プログラムであって、
コンピュータを、
前記加工工具と前記被加工物との距離を算出する手段、
前記加工工具と前記被加工物との距離に基づいて、前記操作者に与える操作感を変更する手段、
として機能させる操作感調整プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットシステム、操作感調整方法及び操作感調整プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
マスターロボットの動作に応じてスレーブロボットを動作させるマスタースレーブ方式のロボットシステムにおいて、高度な操作性を得る目的で、スレーブロボットに掛かる力の情報を操作者にフィードバックさせるバイラテラル制御が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-89736号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来のバイラテラル制御では、マスターロボットの操作者はスレーブロボットのエンドエフェクタに対する接触反力を感知することはできるが、この接触が起きるまでの状態変化は感知することができない。そのため、例えば接触直前の位置の微調整等を好適に実行することが難しい。
【0005】
本発明は、上記事情に鑑みてなされたもので、バイラテラル制御が行われるマスタースレーブ方式のロボットシステムにおいて、操作性を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明に係るロボットシステムは、
操作部を有するマスターロボットと、
加工工具及び被加工物の一方を保持するスレーブロボットと、
前記スレーブロボットに掛かる力の情報を操作者にフィードバックさせる制御手段と、
を備え、
前記制御手段は、前記加工工具と前記被加工物との距離に基づいて、前記操作者に与える操作感を変更する。
【発明の効果】
【0007】
本発明によれば、バイラテラル制御が行われるマスタースレーブ方式のロボットシステムにおいて、操作性を向上させることができる。
【図面の簡単な説明】
【0008】
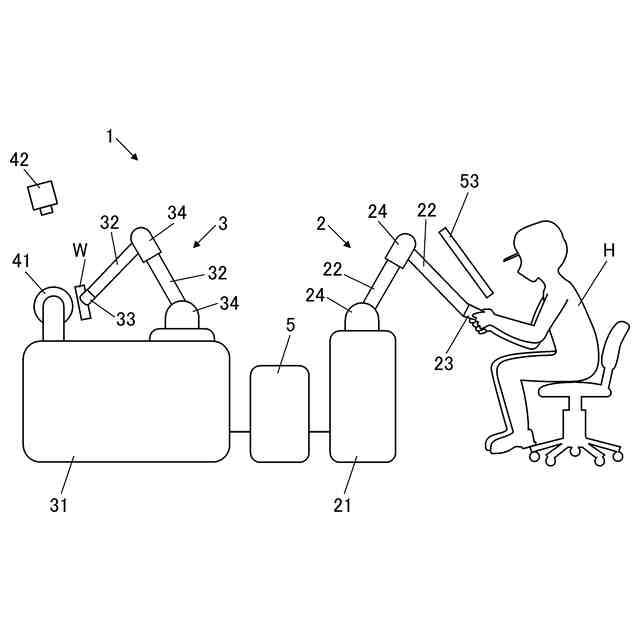
実施形態に係るロボットシステムを模式的に示した図である。
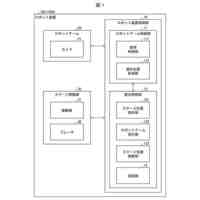
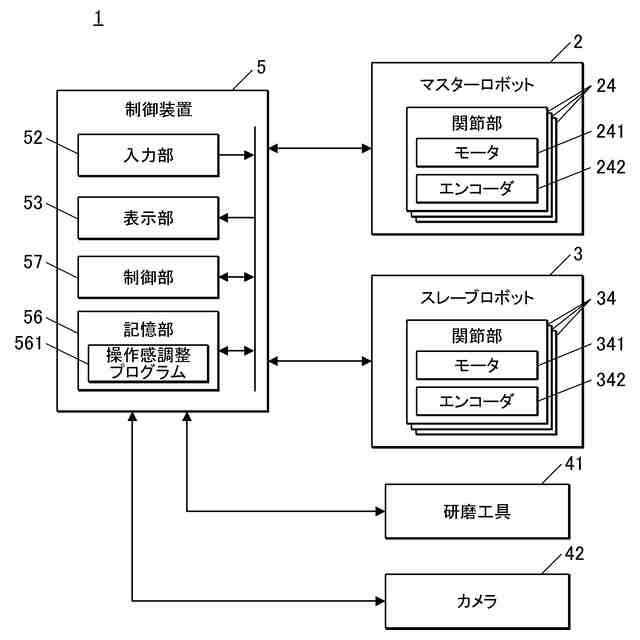
実施形態に係るロボットシステムの概略の制御構成を示すブロック図である。
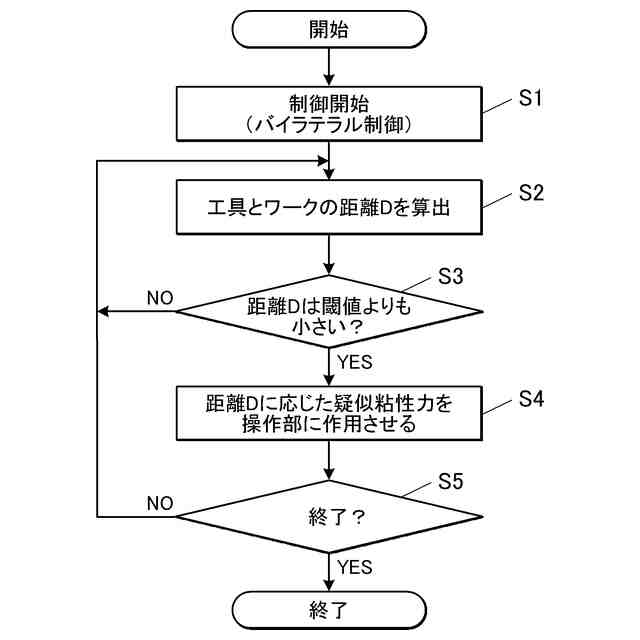
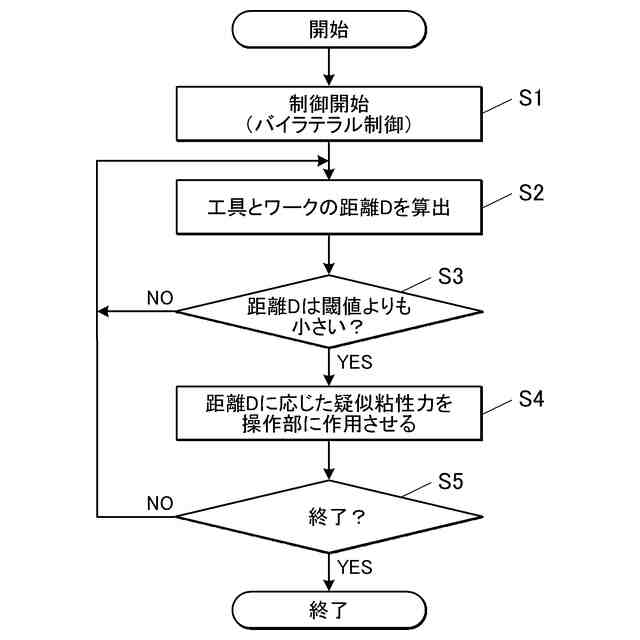
実施形態に係る操作感調整処理の手順を示すフローチャートである。
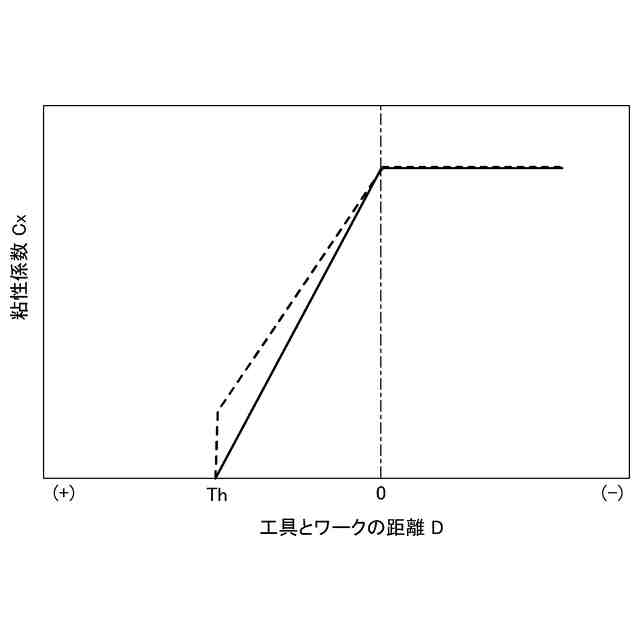
実施形態に係る疑似粘性力の粘性係数を示すグラフである。
実施形態に係る操作感調整処理を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して詳細に説明する。
【0010】
[ロボットシステムの構成]
図1は、本実施形態に係るロボットシステム1を模式的に示した図である。
この図に示すように、ロボットシステム1は、マスター側のロボットアームであるマスターロボット2と、スレーブ側のロボットアームであるスレーブロボット3とを備えたマスタースレーブ方式の遠隔操作システムである。ロボットシステム1では、操作者(人間)Hが手元のマスターロボット2を操作することで、遠隔のスレーブロボット3がその動きに追従して動作して、所定の作業が行われる。本実施形態では、スレーブロボット3に保持させたワークWを研磨工具41に接触させて、ワークWの研磨加工が行われる。また、ロボットシステム1では、スレーブロボット3が動作したときに掛かる力の情報をマスターロボット2(操作者)にフィードバックさせるバイラテラル制御が行われる。
具体的に、ロボットシステム1は、マスターロボット2と、スレーブロボット3と、研磨工具41と、カメラ42と、制御装置5とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
株式会社フジキン
レンチ
8か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
個人
ペットボトル用蓋開け具。
8か月前
株式会社ツノダ
挟持工具
4か月前
株式会社ツノダ
挟持工具
3か月前
UTM株式会社
搬送装置
7か月前
川崎重工業株式会社
ハンド
4か月前
日東工器株式会社
衝撃工具
3日前
株式会社右川ゴム製造所
把持装置
2か月前
個人
ロボットシステム
6か月前
オムロン株式会社
ロボット装置
9か月前
トヨタ自動車株式会社
関節機構
6か月前
川崎重工業株式会社
罫書用治具
20日前
株式会社マキタ
動力工具
1か月前
学校法人立命館
グリッパ
3か月前
学校法人立命館
ロボットハンド
3か月前
株式会社不二越
ロボット
8か月前
トヨタ自動車株式会社
関節機構
7か月前
株式会社不二越
ロボット
6か月前
個人
作業台
7か月前
株式会社ダイヘン
搬送装置
1か月前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
1か月前
学校法人立命館
箸グリッパ
9か月前
オムロン株式会社
ロボットハンド
8か月前
トヨタ自動車株式会社
ハンド構造
10日前
川崎重工業株式会社
ロボット
8か月前
宮川工機株式会社
板状部品移動装置
1か月前
株式会社近藤製作所
ロータリージョイント
8か月前
国立大学法人山形大学
二重関節機構
1か月前
CKD株式会社
電動把持装置
1か月前
株式会社不二越
予測システム
4か月前
東京都公立大学法人
ロボットハンド
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ