TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024083092
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2022197407
出願日
2022-12-09
発明の名称
情報処理装置、制御方法および移動体システム
出願人
学校法人 関西大学
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G05D
1/43 20240101AFI20240613BHJP(制御;調整)
要約
【課題】高度な群構成による振る舞いを創発できる情報処理装置を提供する。
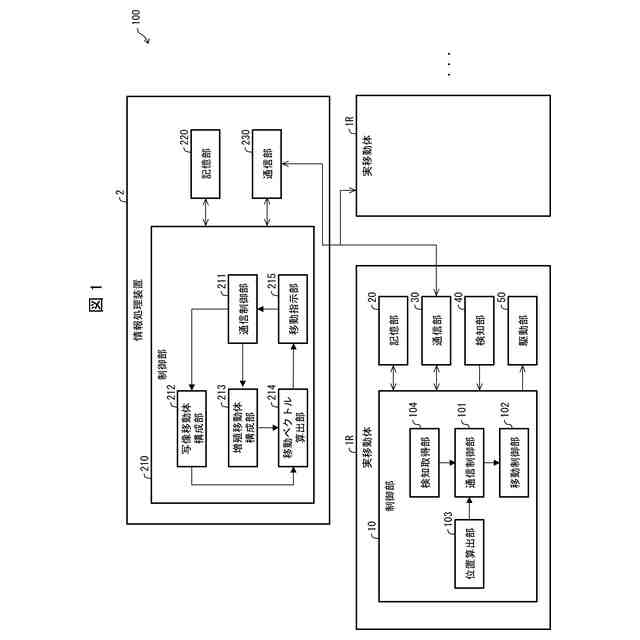
【解決手段】情報処理装置(2)は、仮想空間上に実移動体(1R)に対応する写像移動体を構成する写像移動体構成部(212)と、仮想空間上に写像移動体とは異なる増殖移動体を発生させる増殖移動体構成部(213)と、写像移動体に増殖移動体を加えた仮想移動体に対して群知能を適用することにより、仮想移動体の移動ベクトルを算出する移動ベクトル算出部(214)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
実空間における複数の実移動体と通信する通信部と、
仮想空間上に前記実移動体に対応する写像移動体を構成する写像移動体構成部と、
前記仮想空間上に前記写像移動体とは異なる増殖移動体を発生させる増殖移動体構成部と、
前記写像移動体に前記増殖移動体を加えた仮想移動体に対して群知能を適用することにより、前記写像移動体の移動ベクトルを含む前記仮想移動体の移動ベクトルを算出する移動ベクトル算出部と、
前記仮想移動体の移動ベクトルに基づく移動を前記実移動体に指示する移動指示部と、を備える、情報処理装置。
続きを表示(約 870 文字)
【請求項2】
前記実移動体は、イベントが発する物理情報を検知して、他の実移動体と共に前記イベントを探索する、請求項1に記載の情報処理装置。
【請求項3】
前記増殖移動体構成部は、所定の時間において前記増殖移動体を発生させる、または消去する、請求項1または2に記載の情報処理装置。
【請求項4】
前記増殖移動体構成部は、前記仮想移動体の密度に応じて、前記増殖移動体を発生させる、または消去する、請求項1または2に記載の情報処理装置。
【請求項5】
前記増殖移動体構成部は、前記実移動体の作業状況に応じて、前記増殖移動体を発生させる、または消去する、請求項1または2に記載の情報処理装置。
【請求項6】
前記増殖移動体構成部は、前記実移動体が検知する物理情報に応じて、前記増殖移動体を発生させる、または消去する、請求項2に記載の情報処理装置。
【請求項7】
実空間における複数の実移動体の制御方法であって、
仮想空間上に前記実移動体に対応する写像移動体を構成する写像移動体構成ステップと、
前記仮想空間上に前記写像移動体とは異なる増殖移動体を発生させる増殖移動体構成ステップと、
前記写像移動体に前記増殖移動体を加えた仮想移動体に対して群知能を適用することにより、前記写像移動体の移動ベクトルを含む前記仮想移動体の移動ベクトルを算出する移動ベクトル算出ステップと、
前記仮想移動体の移動ベクトルに基づく移動を前記実移動体に指示する移動指示ステップと、を含む、制御方法。
【請求項8】
実空間上に実移動体と、
仮想空間上に前記実移動体に対応する写像移動体と、
前記仮想空間上に前記写像移動体とは異なる増殖移動体と、を備え、
前記写像移動体に前記増殖移動体を加えた仮想移動体に対して群知能を適用し、算出された前記仮想移動体の移動ベクトルに基づき、前記実移動体は移動する、移動体システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の実移動体を制御する情報処理装置、当該複数の実移動体の制御方法および移動体システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、ロボットまたはUAV(Unmanned Aerial Vehicle:無人航空機)などの自律移動する移動体を用いて所定の作業を行う技術の研究・開発が進められている。
【0003】
ここで、移動体の移動を制御する手法として、仮想的に設定される仮想移動体を用いる手法が知られている。例えば、特許文献1には、所定の実空間の構成を仮想空間として構成し、当該仮想空間の各点の力のベクトルを算出する情報処理装置が開示されている。また、特許文献2には、第1移動体と、複数の第2移動体と、被覆境界に関して第1移動体と反対側にある仮想移動体とがネットワークによって結合されていると仮定して、第1移動体の移動を制御する自律分散制御システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2019/131557号公報
国際公開第2021/070239号公報
特開2021-114020号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
複数の移動体が協調して所定の作業を行う技術が知られている。複数の移動体は群として機能することで、個々の移動体の能力に限定されない作業が可能となる。
【0006】
また、複数の移動体に対して群知能(例えば、粒子群最適化(PSO:Particle Swarm Optimization))を適用することにより、複数の群からなる群構成を適宜構成し、効率的に所定の作業を行う技術も知られている。このような群構成は、移動体数が多いほど、移動体の振る舞いの多様性および移動体間の相互作用が増え、高度な機能構造を有することが分かっている。
【0007】
しかしながら、実空間における移動体数は、物理的・経済的制約により制限されてしまう。また、特許文献1、2においては、仮想空間でシミュレーションを行い実移動体の移動を制御する手法が開示されているものの、高度な群構成による振る舞いを創発するといった概念はない。特許文献1、2は、仮想空間上に移動体を写像することを開示しているが、群知能を構成するために移動体を増殖させるものではない。そのため、特許文献1、2において、複数の移動体に群知能を適用したとしても、生成される群構成の機能構造に限度があるという問題がある。
【0008】
本発明の一態様は、上記の問題点に鑑みてなされたものであり、その目的は、高度な群構成による振る舞いを創発できる情報処理装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明の一態様に係る情報処理装置は、実空間における複数の実移動体と通信する通信部と、仮想空間上に前記実移動体に対応する写像移動体を構成する写像移動体構成部と、前記仮想空間上に前記写像移動体とは異なる増殖移動体を発生させる増殖移動体構成部と、前記写像移動体に前記増殖移動体を加えた仮想移動体に対して群知能を適用することにより、前記写像移動体の移動ベクトルを含む前記仮想移動体の移動ベクトルを算出する移動ベクトル算出部と、前記仮想移動体の移動ベクトルに基づく移動を前記実移動体に指示する移動指示部と、を備える。
【0010】
また、前記実移動体は、イベントが発する物理情報を検知して、他の実移動体と共に前記イベントを探索してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人 関西大学
軸受
3か月前
学校法人 関西大学
光学材料
3か月前
学校法人 関西大学
圧電繊維とその製造方法
2か月前
学校法人 関西大学
基板及び無電解銅めっき方法
3か月前
学校法人 関西大学
磁気素子および磁気構造体の生成方法
4か月前
学校法人 関西大学
骨粗鬆症の予防又は治療剤及び医薬組成物
22日前
学校法人 関西大学
新規ルテニウム錯体及びがん治療用組成物
2か月前
学校法人 関西大学
多分岐型のフェノール樹脂およびその製造方法
3か月前
旭化成株式会社
エポキシ樹脂及び硬化性樹脂組成物
17日前
旭化成株式会社
ケイ素含有オリゴマー及び硬化性樹脂組成物
18日前
学校法人 関西大学
ポリアセタール系樹脂、リソグラフィー膜形成組成物、リソグラフィー下層膜及びレジストパターン形成方法
29日前
学校法人 関西大学
特定波長域の光に応答して可逆的に下限臨界溶液温度(LCST)がシフトする共重合体およびその製造方法
2か月前
学校法人 関西大学
ポリアミド構造または複素環構造を有する多分岐型樹脂、およびこれらを含むリソグラフィー膜形成組成物、ならびに製造方法
3か月前
学校法人 関西大学
シメジ科又はタマバリタケ科食用キノコの栽培用培地、培地添加剤及び栄養強化方法
2か月前
個人
無人作業システム
7日前
村田機械株式会社
産業機械
21日前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
自律移動体
21日前
トヨタ自動車株式会社
自律移動体
2か月前
コフロック株式会社
流量制御装置
1日前
トヨタ自動車株式会社
配送システム
1か月前
株式会社クボタ
作業車
21日前
アズビル株式会社
パラメータ調整装置
1か月前
株式会社明電舎
車両
21日前
株式会社フジキン
流体制御装置
1か月前
トヨタ自動車株式会社
ロボットシステム
21日前
株式会社ダイフク
搬送設備
8日前
トヨタ自動車株式会社
位置推定システム
2か月前
トヨタ自動車株式会社
自律移動システム
2か月前
株式会社村田製作所
温度補償回路
7日前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ロボットシステム
29日前
株式会社ダイフク
物品搬送設備
8日前
ローム株式会社
電源回路
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ