TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024082572
公報種別
公開特許公報(A)
公開日
2024-06-20
出願番号
2022196515
出願日
2022-12-08
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20240613BHJP(信号)
要約
【課題】 信号機の灯火表示の変化に起因して減速制御から加速制御に切り替えられた場合に車両の運転者が不安感を覚える可能性を低減する。
【解決手段】 車両制御装置は、撮像装置11により取得される情報に基づいて車両の進路前方に存在する信号機の灯火表示と、車両に対する当該信号機の相対位置と、を含む情報である信号機情報を取得し、車両の速度を含む車両情報を取得し、アダプティブクルーズ制御の実行中に交差点を通過不可能であると判定した場合は減速制御を実行し、減速制御の実行中に信号機の灯火表示が通行許可表示に変化した場合に満たされる制御切替条件が成立したときは加速制御を開始する。車両制御装置は、制御切替条件が成立した時点における交差点までの距離が所定の距離閾値以下である場合に満たされる特定条件が成立したときは、特定条件が成立していないときと比較して加速制御による加速の程度を緩やかにする。
【選択図】 図2
特許請求の範囲
【請求項1】
車両に搭載され、
撮像装置又は通信部により取得される情報に基づいて前記車両の進路前方に存在する信号機の灯火表示と、前記車両に対する信号機の相対位置と、を含む情報である信号機情報を取得する信号機情報取得部と、
前記車両の速度を含む車両情報を取得する車両情報取得部と、
アダプティブクルーズ制御の実行中に前記信号機情報及び前記車両情報に基づいて交差点を通過不可能であると判定した場合は前記交差点の手前で前記車両を停止させるための減速制御を前記アダプティブクルーズ制御として実行し、前記減速制御の実行中に前記信号機情報に含まれる信号機の灯火表示が通行を許可する表示に変化した場合に満たされる制御切替条件が成立したときは前記減速制御を中断して加速制御を前記アダプティブクルーズ制御として開始する走行制御部と、
を備え、
前記走行制御部は、
前記制御切替条件が成立した時点における前記車両から前記交差点までの距離が所定の距離閾値以下である場合、又は、前記時点における前記車両が前記交差点に到達するまでに要すると予測される到達予測時間が所定の時間閾値以下である場合に満たされる特定条件が成立したときは、前記特定条件が成立していないときと比較して前記加速制御による加速の程度を緩やかにするように構成された、
車両制御装置。
続きを表示(約 870 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記走行制御部は、前記特定条件が成立した時点における前記車両から前記交差点までの距離又は前記到達予測時間が短いほど、前記加速制御による加速の程度を緩やかにするように構成された、
車両制御装置。
【請求項3】
請求項1又は請求項2に記載の車両制御装置において、
前記走行制御部は、前記特定条件の成立後、前記車両が前記交差点を通過した場合に満たされる交差点通過条件が成立したときは、前記加速制御による加速の程度を大きくするように構成された、
車両制御装置。
【請求項4】
請求項3に記載の車両制御装置において、
前記走行制御部は、前記交差点通過条件が成立した場合、前記加速の程度を時間の経過とともに大きくするように構成された、
車両制御装置。
【請求項5】
請求項1又は請求項2に記載の車両制御装置において、
前記走行制御部は、前記特定条件が成立したときは、前記特定条件が成立していないときと比較してジャークを正の値の範囲内で小さくすることにより前記加速制御による加速の程度を緩やかにするように構成された、
車両制御装置。
【請求項6】
請求項1又は請求項2に記載の車両制御装置において、
前記走行制御部は、前記特定条件が成立したときは、前記特定条件が成立していないときと比較して目標加速度を正の値の範囲内で小さくすることにより前記加速制御による加速の程度を緩やかにするように構成された、
車両制御装置。
【請求項7】
請求項1又は請求項2に記載の車両制御装置において、
前記走行制御部は、前記特定条件が成立したときは、前記特定条件が成立していないときと比較してジャーク及び目標加速度の両方を何れも正の値の範囲内で小さくすることにより前記加速制御による加速の程度を緩やかにするように構成された、
車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、信号機の灯火表示に基づいて減速制御及び加速制御をアダプティブクルーズ制御として実行可能な車両制御装置に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
特許文献1には、運転者の操作とは無関係に車両を減速させる減速支援制御を実行可能な運転支援装置が記載されている。この運転支援装置は、車両の進路前方に車両の減速又は停止を要求する対象が存在する場合、当該対象の種別に応じて減速支援制御の終了条件を変更するように構成されている。例えば、運転支援装置は、当該対象の種別が他車両又は歩行者である場合は車両が完全に停止するまで減速支援制御を行い、当該対象の種別が赤信号である場合は車両が完全に停止する前に減速支援制御を終了する。特許文献1には、この運転支援装置によれば、一律の減速態様で減速支援制御を行う構成と比較して運転者が違和感を覚える可能性を低減できる旨が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-97337号公報
【発明の概要】
【0004】
ところで、従来から、車両の運転者の運転操作を支援する運転支援制御としてアダプティブクルーズ制御(ACC:Adaptive Cruise Control)が知られている。アダプティブクルーズ制御は、先行車両が存在していない場合には車両の速度が所定の設定車速に一致するように加速制御及び減速制御を実行し、先行車両が存在している場合には当該先行車両との車間距離(又は車間時間)が所定の設定車間距離(又は設定車間時間)に一致するように加速制御及び減速制御を実行する制御である。
【0005】
従来のアダプティブクルーズ制御は、車両が高速道路及び自動車専用道路を走行する際に使用されることを前提として設計されていた。しかしながら、近年、一般道路においてもアダプティブクルーズ制御による適切な走行を可能とする車両制御装置の研究開発が行われている。このような車両制御装置は、車両の進路前方の信号機の灯火表示に基づいて減速制御及び加速制御をアダプティブクルーズ制御として実行するように構成され得る。具体的には、車両制御装置は、信号機の灯火表示に基づいて交差点を通過不可能であると判定した場合は車両を所定の位置(例えば、交差点の停止線の位置)で停止させるための減速制御を実行する。また、車両制御装置は、当該減速制御の実行中に信号機の灯火表示が変化し(典型的には、赤色から青色の灯火表示に変化し)、これにより交差点を通過可能になったと判定した場合は減速制御を中断して加速制御を実行する(別言すれば、減速制御から加速制御に切り替える)。
【0006】
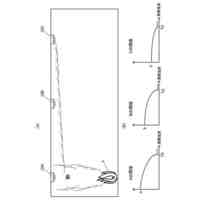
このとき、一律の加速態様で加速制御を実行すると、加速の程度や加速制御が開始されるタイミングによっては運転者が不安感を覚える可能性がある。例えば、車両制御装置が比較的に大きい加速度で一律に加速制御するように構成されている場合を考える。この場合、交差点から比較的に近い地点を走行しているときに信号機の灯火表示が上述したように変化すると、車両は当該地点において加速制御により比較的に大きい加速度で加速されるため、車両は勢いよく加速して比較的に短時間で交差点に進入することになる。ここで、信号機の灯火表示が変化してからしばらくの間は、まだ交差点内に他車両や歩行者(厳密には、自車線と交差する方向に通行する他車両や歩行者)が存在している可能性がある。このため、比較的に大きい加速度で一律に加速制御を実行する構成では、車両が交差点を安全に通過できるか否かを運転者が十分に確認する間もなく車両が勢いよく加速された状態で交差点に進入してしまう事態が発生し、運転者が不安感を覚える可能性がある。従来の車両制御装置(特許文献1の運転支援装置を含む)ではこの点について何らの検討もされておらず、改善の余地がある。
【0007】
本発明は、上述した問題に対処するためになされたものである。即ち、本発明の目的の一つは、信号機の灯火表示の変化に起因して減速制御から加速制御に切り替えられた場合に車両の運転者が不安感を覚える可能性を低減することが可能な車両制御装置を提供することにある。
【0008】
本発明による車両制御装置(以下、「本発明装置」と称する。)は、
車両に搭載され、
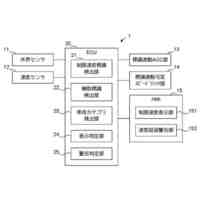
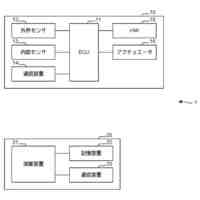
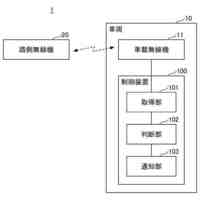
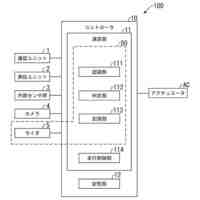
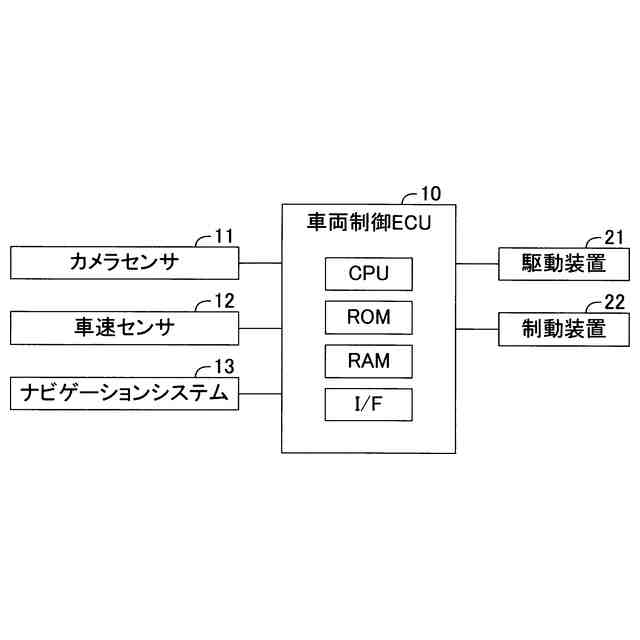
撮像装置(11)又は通信部により取得される情報に基づいて前記車両の進路前方に存在する信号機の灯火表示と、前記車両に対する信号機の相対位置と、を含む情報である信号機情報を取得する信号機情報取得部と、
前記車両の速度を含む車両情報を取得する車両情報取得部と、
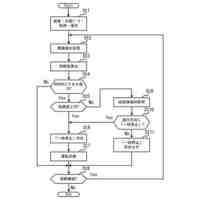
アダプティブクルーズ制御の実行中に前記信号機情報及び前記車両情報に基づいて交差点を通過不可能であると判定した場合(ステップ345:No)は前記交差点の手前で前記車両を停止させるための減速制御を前記アダプティブクルーズ制御として実行し(ステップ355)、前記減速制御の実行中に前記信号機情報に含まれる信号機の灯火表示が通行を許可する表示に変化した場合に満たされる制御切替条件が成立したとき(ステップ360:Yes)は前記減速制御を中断して加速制御を前記アダプティブクルーズ制御として開始する走行制御部と、
を備える。
前記走行制御部は、
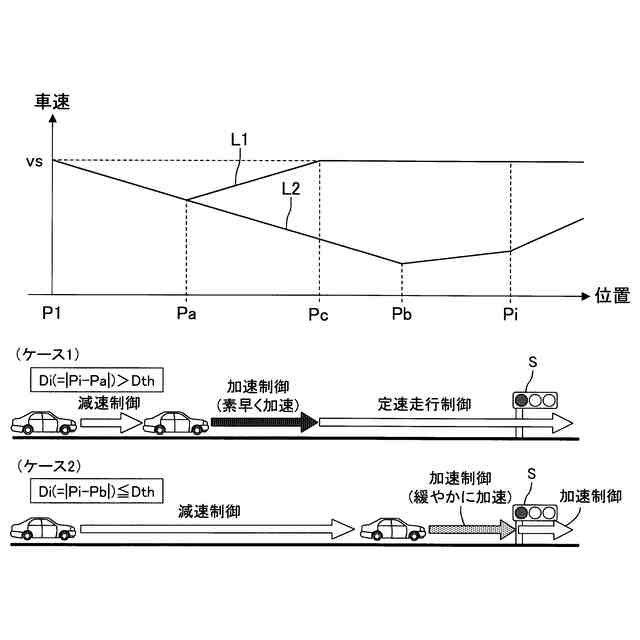
前記制御切替条件が成立した時点における前記車両から前記交差点までの距離(Di)が所定の距離閾値(Dth)以下である場合、又は、前記時点における前記車両が前記交差点に到達するまでに要すると予測される到達予測時間が所定の時間閾値以下である場合に満たされる特定条件が成立したとき(ステップ365:Yes)は、前記特定条件が成立していないとき(ステップ365:No)と比較して前記加速制御による加速の程度を緩やかにするように構成されている。
【0009】
本発明装置では、制御切替条件(アダプティブクルーズ制御の実行中に交差点を通過不可能であると判定されて減速制御が実行されている最中に信号機の灯火表示が「通行を許可する表示」に変化した場合に満たされる条件)が成立して減速制御から加速制御に切り替えられた場合において特定条件(交差点までの距離が距離閾値以下である場合又は到達予測時間が時間閾値以下である場合に満たされる条件)が成立したときは、特定条件が成立していないときと比較して加速制御による加速の程度が緩やかにされる。この構成によれば、特定条件が成立する程度に車両が交差点から近い地点を走行している場合に制御切替条件が成立したときは、車両は緩やかに加速されてある程度の時間をかけて交差点に進入する。このため、運転者は車両が交差点を安全に通過できるか否か(即ち、交差点内にまだ他車両や歩行者が存在していないか否か)を十分に確認した上で交差点に進入することが可能になり、運転者が不安感を覚える可能性を低減することができる。
【0010】
また、本発明装置では、制御切替条件が成立した場合、加速制御による加速の程度が一律に緩やかにされるのではなく、特定条件が成立したときにのみ緩やかにされるように構成されている。この構成によれば、特定条件が不成立となる程度に車両が交差点から離れた地点を走行している場合に制御切替条件が成立したときは、車両はある程度素早く加速される。このため、交差点までの距離が比較的に長いにも関わらず車両が緩やかにしか加速されないことに起因して運転者が煩わしさを感じる可能性を低減することができる。即ち、本発明装置では、制御切替条件が成立した場合、特定条件の成立可否に基づいて加速制御による加速の程度が変更される。このため、交差点までの距離又は到達予測時間に応じて適切な加速制御を実行することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
防犯砂利システム
29日前
日本精機株式会社
表示システム
23日前
個人
警報装置付きフェイスガード
29日前
個人
音による速度計及びプログラム
1か月前
日本精機株式会社
盗難防止システム
1か月前
ニッタン株式会社
発信機
22日前
キヤノン株式会社
異常判定装置
1か月前
ニッタン株式会社
発信機
22日前
加藤電機株式会社
車両用警報装置
16日前
合同会社Gugenka
防犯装置
1か月前
能美防災株式会社
発信機
16日前
トヨタ自動車株式会社
情報処理装置
1か月前
株式会社大林組
監視システム
8日前
株式会社JVCケンウッド
警告装置
23日前
ニッタン株式会社
感知器ベース
19日前
トヨタ自動車株式会社
警告装置
1か月前
常盤電業株式会社
表示機、信号機
1か月前
常盤電業株式会社
表示機、信号機
1か月前
能美防災株式会社
火災感知器
8日前
中国電力株式会社
通行止め管理システム
1か月前
本田技研工業株式会社
運転支援装置
1か月前
ジェネクスト株式会社
駐停車違反判定装置
1か月前
東京瓦斯株式会社
自動運転支援装置
1か月前
ニッタン株式会社
火災報知システム
1か月前
トヨタ自動車株式会社
運転支援装置
1か月前
セルスター工業株式会社
複合機能車載装置
19日前
トヨタ自動車株式会社
緊急通報装置
2か月前
株式会社豊田中央研究所
注意喚起装置
16日前
トヨタ自動車株式会社
車両の制御装置
19日前
能美防災株式会社
感知器取付機器
2か月前
トヨタ自動車株式会社
停止線探索装置
2か月前
豊田合成株式会社
乗員見守りシステム
15日前
積水ハウス株式会社
危険報知システム
1か月前
本田技研工業株式会社
区画線認識装置
1か月前
トヨタ自動車株式会社
逆走車判定装置
1か月前
積水ハウス株式会社
見守り支援システム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ