TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024078099
公報種別
公開特許公報(A)
公開日
2024-06-10
出願番号
2022190455
出願日
2022-11-29
発明の名称
遠隔操作ロボット
出願人
住友重機械工業株式会社
代理人
個人
主分類
B25J
3/00 20060101AFI20240603BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】フィードバック制御系が不安定にならないように、フィードバック制御系の応答特性を調整することが可能な遠隔操作ロボットを提供する。
【解決手段】作業者がリーダロボットを操作する。フォロワロボットがワークに対して作業を行う。制御装置が、リーダロボットの動作に基づいてフォロワロボットを協調動作させるとともに、フォロワロボットがワークから受ける力を、リーダロボットの動作にフィードバックする。作業者が入力装置に指令を入力する。出力装置が、作業者に情報を通知する。制御装置のフィードバック制御系の少なくとも1つのパラメータが可変である。入力装置に対してパラメータの値を変更する指令が入力されると、制御装置は、フィードバック制御系の安定余裕を計算し、パラメータの値の変化に追従して、安定余裕を示す情報を出力装置に出力する。
【選択図】図1
特許請求の範囲
【請求項1】
作業者が操作するリーダロボットと、
ワークに対して作業を行うフォロワロボットと、
前記リーダロボットの動作に基づいて、前記フォロワロボットを協調動作させるとともに、前記フォロワロボットが前記ワークから受ける力を、前記リーダロボットの動作にフィードバックする制御装置と、
作業者が指令を入力する入力装置と、
作業者に情報を通知する出力装置と
を備え、
前記制御装置のフィードバック制御系の少なくとも1つのパラメータが可変であり、
前記入力装置に対して前記パラメータの値を変更する指令が入力されると、前記制御装置は、前記フィードバック制御系の安定余裕を計算し、前記パラメータの値の変化に追従して、安定余裕を示す情報を前記出力装置に出力する遠隔操作ロボット。
続きを表示(約 670 文字)
【請求項2】
前記制御装置は、前記パラメータを変更する操作があると、前記フィードバック制御系のゲイン余裕及び位相余裕に基づいて前記安定余裕を計算し、前記安定余裕が許容範囲を逸脱すると、前記パラメータの変更を禁止する請求項1に記載の遠隔操作ロボット。
【請求項3】
前記入力装置に対して設定値を識別する設定値識別名が入力されると、前記制御装置は、前記設定値識別名と、現在の前記パラメータの値とを関連付けて記憶し、
前記入力装置に対して前記設定値識別名が指定されて前記パラメータの呼び出しの指令が入力されると、前記制御装置は、指定された前記設定値識別名に関連付けられた前記パラメータの値を、前記パラメータの値として設定する請求項1または2に記載の遠隔操作ロボット。
【請求項4】
作業者が操作するリーダロボットと、
ワークに対して作業を行うフォロワロボットと、
前記リーダロボットの動作に基づいて、前記フォロワロボットを協調動作させるとともに、前記フォロワロボットが前記ワークから受ける触覚に関する情報を、前記リーダロボットの動作にフィードバックする制御装置と、
作業者が指令を入力する入力装置と
を備え、
前記制御装置は、前記入力装置に入力された指令に基づいて、前記フィードバックの程度を調整可能であり、
前記入力装置は、可動範囲内で移動または回転される操作子を含み、前記操作子が操作されることによって前記指令が入力される遠隔操作ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔操作ロボットに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
作業者がリーダロボットを操作し、遠隔のフォロワロボットを協調動作させることにより作業を行う遠隔操作ロボットが公知である。例えば、特許文献1に、内視鏡によって取り込まれた画像を見ながら操作ハンドルを操作することによってマニピュレータを動作させるロボット手術システムが開示されている。特許文献1には、操作ハンドルが操作可能範囲の限界に達したとき、またはマニピュレータが動作可能範囲の限界に達したときに、操作ハンドルを操作可能範囲内に戻し、マニピュレータを動作可能範囲内に戻す際の操作を容易にする技術が開示されている。内視鏡の画像に重ねて表示されたグラフィカルユーザインタフェースにより、この操作を容易に行うことができるように構成されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-88805号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
加工や研磨等の触感に頼る作業を遠隔から行う場合は、加工を行っているフォロワロボットから、作業者が操作しているリーダロボットに、触感に関わる情報、例えばワークから受ける反力や、加工箇所で発生している振動等の情報をフィードバックすることが好ましい。触感に関わる情報のフィードバックの程度は、作業者が作業を行いやすいように調整することが好ましい。すなわち、フィードバック制御系の応答特性を調整できることが好ましい。さらに、制御系の専門知識を持たない作業者でも、容易にフィードバック制御系の応答特性を調整できることが好ましい。
【0005】
フィードバック制御系の応答特性を調整する場合、調整の仕方によってはフィードバック制御系が不安定になり、ロボットの暴走を引き起こす危険性がある。本発明の目的は、フィードバック制御系が不安定にならないように、フィードバック制御系の応答特性を調整することが可能な遠隔操作ロボットを提供することである。本発明の他の目的は、作業者が、フィードバック制御系の応答特性を容易に調整することが可能な遠隔操作ロボットを提供することである。
【課題を解決するための手段】
【0006】
本発明の一観点によると、
作業者が操作するリーダロボットと、
ワークに対して作業を行うフォロワロボットと、
前記リーダロボットの動作に基づいて、前記フォロワロボットを協調動作させるとともに、前記フォロワロボットが前記ワークから受ける力を、前記リーダロボットの動作にフィードバックする制御装置と、
作業者が指令を入力する入力装置と、
作業者に情報を通知する出力装置と
を備え、
前記制御装置のフィードバック制御系の少なくとも1つのパラメータが可変であり、
前記入力装置に対して前記パラメータの値を変更する指令が入力されると、前記制御装置は、前記フィードバック制御系の安定余裕を計算し、前記パラメータの値の変化に追従して、安定余裕を示す情報を前記出力装置に出力する遠隔操作ロボットが提供される。
【0007】
本発明の他の観点によると、
作業者が操作するリーダロボットと、
ワークに対して作業を行うフォロワロボットと、
前記リーダロボットの動作に基づいて、前記フォロワロボットを協調動作させるとともに、前記フォロワロボットが前記ワークから受ける触覚に関する情報を、前記リーダロボットの動作にフィードバックする制御装置と、
作業者が指令を入力する入力装置と
を備え、
前記制御装置は、前記入力装置に入力された指令に基づいて、前記フィードバックの程度を調整可能であり、
前記入力装置は、可動範囲内で移動または回転される操作子を含み、前記操作子が操作されることによって前記指令が入力される遠隔操作ロボットが提供される。
【発明の効果】
【0008】
出力装置に出力された安定余裕を示す情報を確認しながらパラメータを変更することにより、フィードバック制御系が不安定にならないように、フィードバック制御系の応答特性を調整することが可能になる。また、作業者は、操作子を可動範囲内で移動または回転させることにより、フィードバックの程度を指令することができるため、制御に関する専門知識を持っていない作業者でも、容易にフィードバックの程度を調整することができる。
【図面の簡単な説明】
【0009】
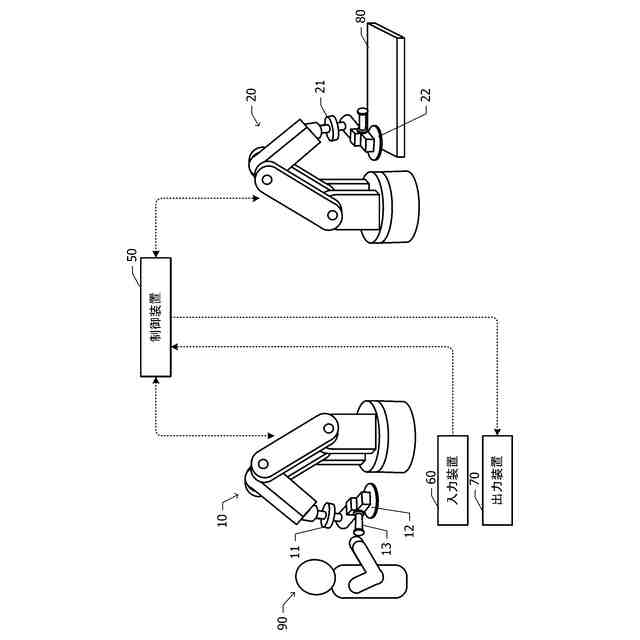
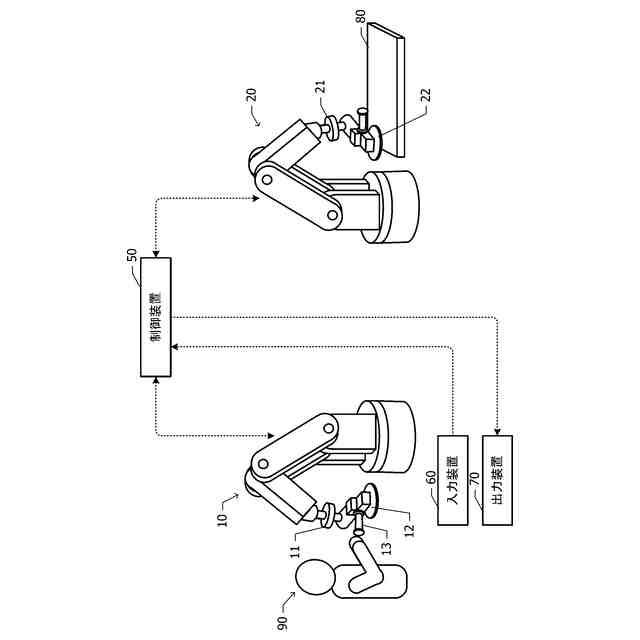
図1は、一実施例による遠隔操作ロボットの概略図である。
図2は、図1に示した実施例による遠隔操作ロボットの制御装置の1つのフィードバック制御系を表すブロック線図である。
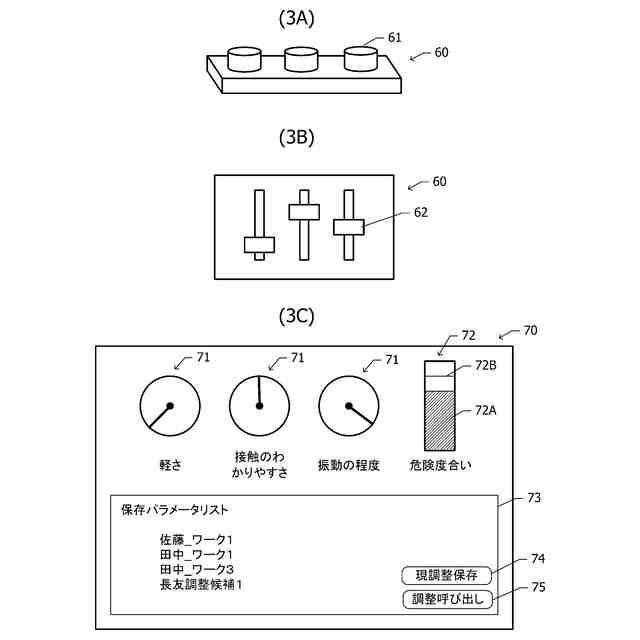
図3A及び図3Bは、入力装置の一例を示す斜視図であり、図3Cは、出力装置の表示画面に表示された画像の一例を示す図である。
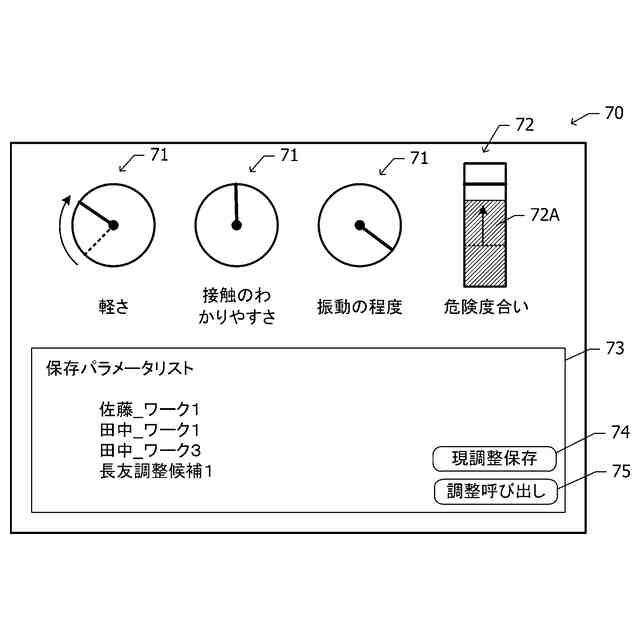
図4は、作業者がパラメータの設定値を変更したときの出力装置の表示の変化を示す図である。
図5A及び図5Bは、他の実施例による遠隔操作ロボットの出力装置の表示画面に表示された画像の一例を示す図である。
図6は、さらに他の実施例による遠隔操作ロボットの制御装置が実行する手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
図1~図4を参照して、一実施例による遠隔操作ロボットについて説明する。
図1は、本実施例による遠隔操作ロボットの概略図である。本実施例による遠隔操作ロボットは、リーダロボット10、フォロワロボット20、制御装置50、入力装置60、及び出力装置70を含む。リーダロボット10及びフォロワロボット20は、例えば多関節ロボットアームを含む。リーダロボット10及びフォロワロボット20の先端に、それぞれ工作機械12、22が取り付けられている。リーダロボット10の先端には、さらに操作ハンドル13が取り付けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
1か月前
株式会社ツノダ
挟持工具
4か月前
UTM株式会社
搬送装置
7か月前
株式会社ツノダ
挟持工具
3か月前
日東工器株式会社
衝撃工具
10日前
川崎重工業株式会社
ハンド
4か月前
株式会社右川ゴム製造所
把持装置
3か月前
個人
ロボットシステム
6か月前
川崎重工業株式会社
罫書用治具
27日前
学校法人立命館
グリッパ
3か月前
株式会社不二越
ロボット
6か月前
トヨタ自動車株式会社
関節機構
6か月前
株式会社マキタ
動力工具
1か月前
学校法人立命館
ロボットハンド
4か月前
トヨタ自動車株式会社
関節機構
7か月前
個人
プーリーキー抜き治具
3か月前
トヨタ自動車株式会社
ハンド構造
17日前
個人
作業台
7か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社不二越
予測システム
4か月前
東京都公立大学法人
ロボットハンド
2か月前
CKD株式会社
電動把持装置
2か月前
宮川工機株式会社
板状部品移動装置
1か月前
国立大学法人山形大学
二重関節機構
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社ダイヘン
画像生成装置
3か月前
工機ホールディングス株式会社
作業機
6か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社中村製作所
トルクドライバー
4か月前
工機ホールディングス株式会社
作業機
26日前
株式会社ダイヘン
情報処理装置
3か月前
工機ホールディングス株式会社
作業機
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ