TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024071171
公報種別
公開特許公報(A)
公開日
2024-05-24
出願番号
2022181984
出願日
2022-11-14
発明の名称
マニピュレータ
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人あいち国際特許事務所
主分類
B25J
5/00 20060101AFI20240517BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業性を確保しつつ、転倒を防止することができるマニピュレータを提供すること。
【解決手段】マニピュレータ1は、走行体2と、走行体2に接続されたアーム部3と、を備える。アーム部3は、移動対象物10を保持する保持部31を有する。また、アーム部3は、走行体2に対して保持部31を移動させることができるよう構成されている。また、マニピュレータ1は、マニピュレータ1に下方向Z1の力を作用させる作用部4を備える。
【選択図】図1
特許請求の範囲
【請求項1】
走行体(2)と、
該走行体に接続されたアーム部(3)と、を備えたマニピュレータ(1)であって、
上記アーム部は、移動対象物(10)を保持する保持部(31)を有すると共に、上記走行体に対して上記保持部を移動させることができるよう構成されており、
上記マニピュレータに下方向(Z1)の力(F1)を作用させる作用部(4)を備える、マニピュレータ。
続きを表示(約 970 文字)
【請求項2】
上記作用部と、上記走行体が走行する床(11)との距離を調整する距離調整部(5)を有する、請求項1に記載のマニピュレータ。
【請求項3】
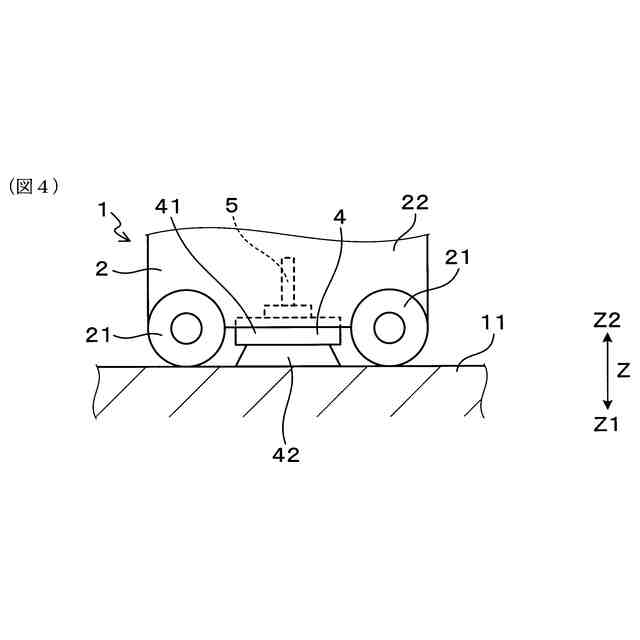
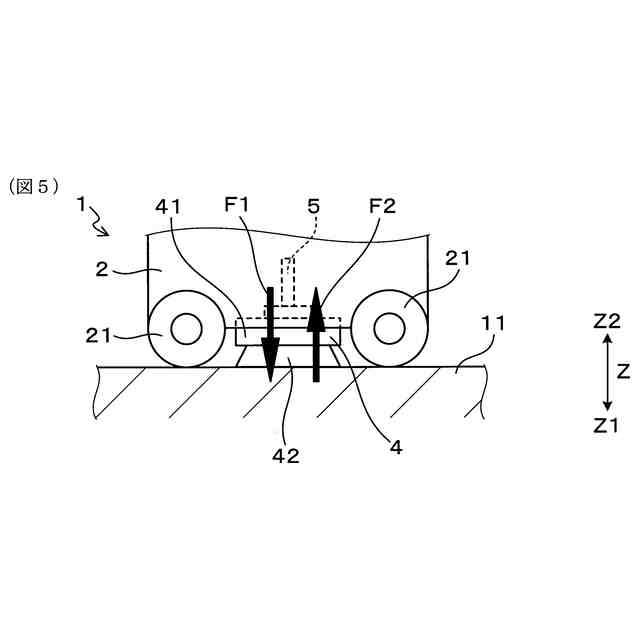
上記作用部は、真空ポンプ(41)と、該真空ポンプに接続された吸引部(42)とを有し、上記作用部は、上記吸引部によって、上記走行体が走行する床(11)を吸引することにより、上記マニピュレータに下方向の力を作用させる、請求項1又は2に記載のマニピュレータ。
【請求項4】
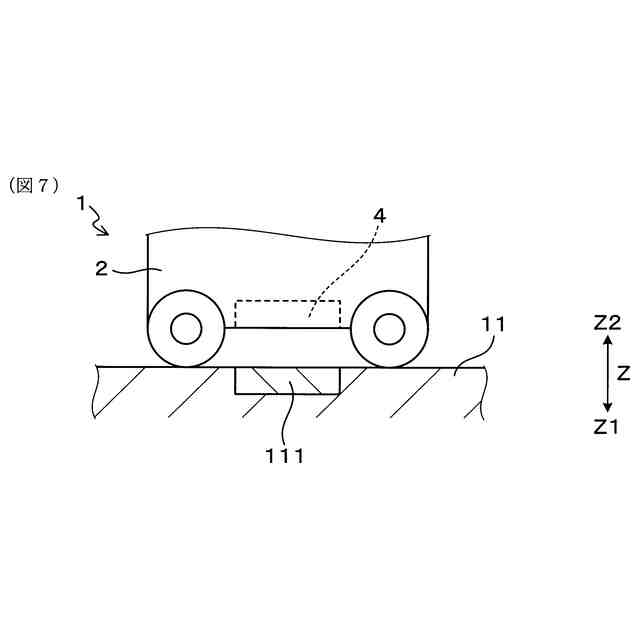
上記作用部、及び上記走行体が走行する床(11)は、それぞれ磁性体を有し、上記作用部と上記床とが磁力によって互いに引き付けられることにより、上記作用部は上記マニピュレータに下方向の力を作用させる、請求項1又は2に記載のマニピュレータ。
【請求項5】
上記作用部は、上記マニピュレータの外部に上方向(Z2)の力(F2)を作用させることにより、上記マニピュレータに下方向の力を作用させる、請求項1に記載のマニピュレータ。
【請求項6】
所定のタイミングにて上記マニピュレータに下方向の力を作用させるよう上記作用部を制御する制御部(14)と、上記マニピュレータに作用する下方向の力を計測する計測センサ(13)と、を備え、上記作用部は、上記制御部が送信した作動信号を受けたときに、作動するよう構成されており、
上記制御部が上記作用部に上記作動信号を送信した際に、上記計測センサによって計測された値であるセンサ計測値が所定の値未満であるとき、上記マニピュレータの少なくとも一部の動きを停止させる停止部(15)、
及び、上記制御部が上記作用部に上記作動信号を送信した際に、上記センサ計測値が所定の値未満であるとき、異常状態であると判断すると共に、上記異常状態であることを報知対象に報知する状態報知部(16)、のうち、少なくとも一つを備える、請求項1又は2に記載のマニピュレータ。
【請求項7】
上記作用部は、上記マニピュレータの外部に設けられた支持部(12)に支持させることが可能な被支持部(43)を有し、上記支持部に上記被支持部を支持させることにより、上記被支持部に下方向の力を作用させる、請求項1に記載のマニピュレータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マニピュレータに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
例えば、特許文献1に開示されているように、車両と、車両に取付けられたマニピュレータアームとからなるマニピュレータが知られている。特許文献1に記載のマニピュレータは、作業スペースが狭く、かつ床の耐荷重の小さい作業現場で使用できるよう、小型軽量化を図ると共に、マニピュレータの重心が車両を中心とする所定領域内に位置するように車両を移動させることにより、転倒防止を図っている。
【先行技術文献】
【特許文献】
【0003】
特開平05-004177号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のマニピュレータは、小型軽量化を図っているため、車両を支持している複数の支持点、つまり複数の車輪の接地部分に囲まれた領域が狭くなりやすく、上記所定領域が狭くなりやすい。また、特許文献1に記載のマニピュレータは、マニピュレータアームによってワークを把持する際、マニピュレータの重心が上記所定領域内に位置するように車両を移動させるため、マニピュレータアームの姿勢が制限されやすい。それゆえ、特許文献1に記載のマニピュレータは、作業性確保の観点から、改善の余地があるといえる。
【0005】
本発明は、かかる課題に鑑みてなされたものであり、作業性を確保しつつ、転倒を防止することができるマニピュレータを提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明の一態様は、走行体(2)と、
該走行体に接続されたアーム部(3)と、を備えたマニピュレータ(1)であって、
上記アーム部は、移動対象物(10)を保持する保持部(31)を有すると共に、上記走行体に対して上記保持部を移動させることができるよう構成されており、
上記マニピュレータに下方向(Z1)の力(F1)を作用させる作用部(4)を備える、マニピュレータにある。
【発明の効果】
【0007】
上記マニピュレータは作用部を備える。それゆえ、移動対象物を保持した保持部をアーム部によって移動させた際や、保持部が移動対象物を保持した際の転倒を防止することができる。その結果、作業性を確保しつつ、転倒を防止することができる。
【0008】
以上のごとく、上記態様によれば、作業性を確保しつつ、転倒を防止することができるマニピュレータを提供することができる。
なお、特許請求の範囲及び課題を解決する手段に記載した括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものであり、本発明の技術的範囲を限定するものではない。
【図面の簡単な説明】
【0009】
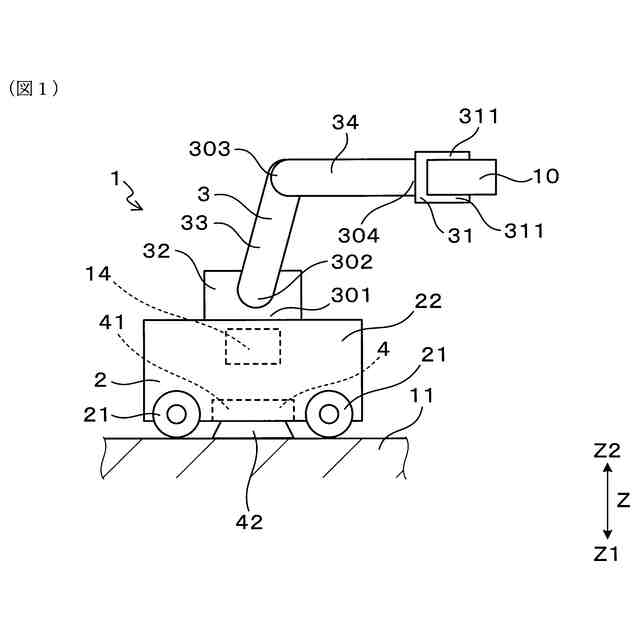
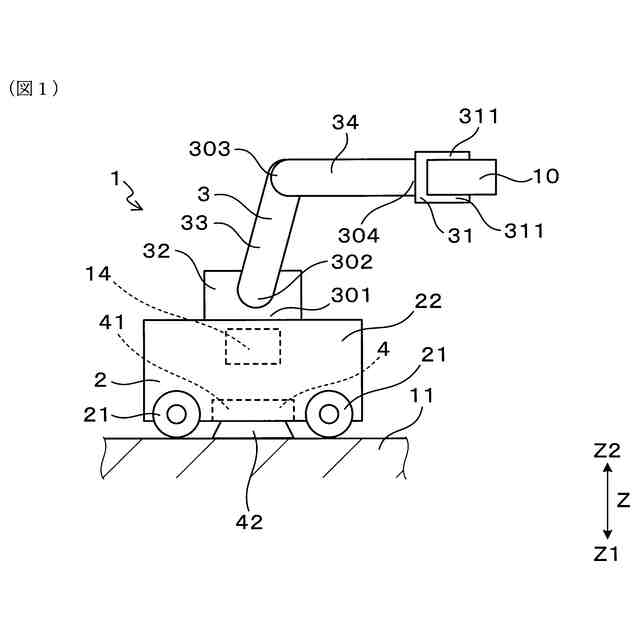
実施形態1における、マニピュレータの外観図。
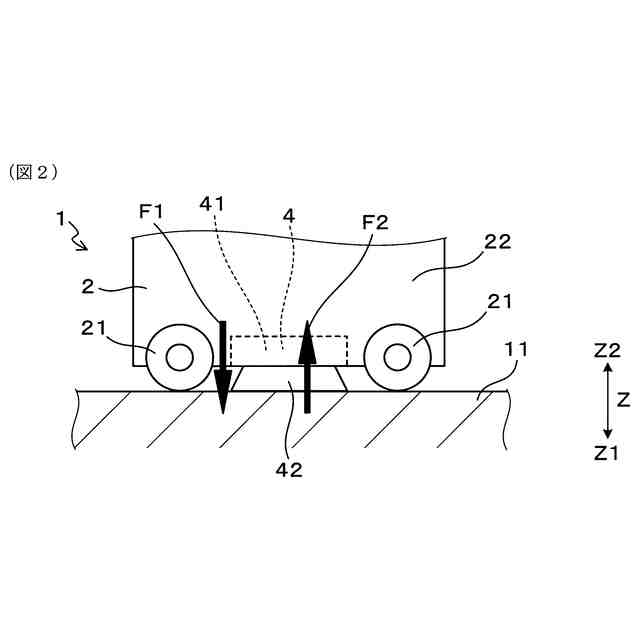
実施形態1における、マニピュレータに作用する下方向の力と、床に作用する上方向の力とを示す図。
実施形態2における、マニピュレータの外観図。
実施形態2における、作用部付近の外観図であって、距離調整部によって作用部を床に当接させた様子を示す図。
実施形態2における、マニピュレータに作用する下方向の力と、床に作用する上方向の力とを示す図。
実施形態3における、作用部付近の外観図。
実施形態4における、作用部付近の外観図。
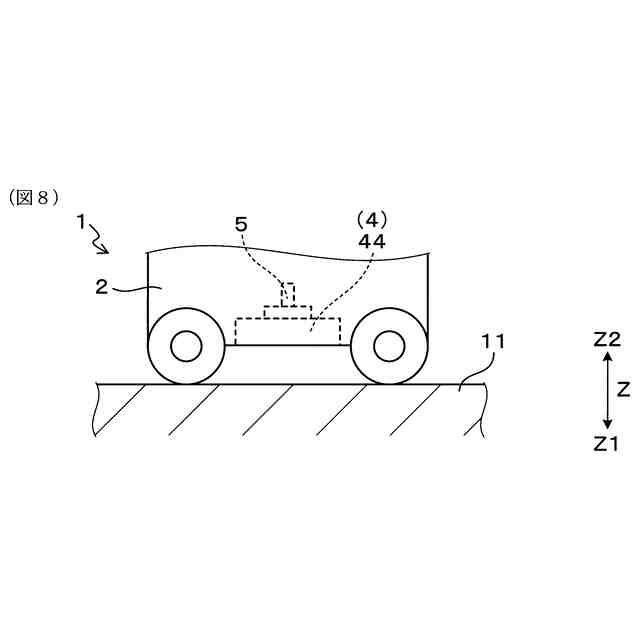
実施形態5における、作用部付近の外観図。
実施形態5における、作用部付近の外観図であって、距離調整部によって作用部と床との間の距離を調整した後の図。
実施形態6における、作用部付近の外観図。
実施形態6における、作用部付近の外観図であって、距離調整部によって作用部と床との間の距離を調整した後の図。
実施形態7における、作用部付近の外観図。
実施形態7における、作用部付近の外観図であって、距離調整部によって作用部と床との間の距離を調整した後の図。
実施形態8における、作用部付近の外観図であって、距離調整部によって作用部を床に当接させた様子を示す図。
実施形態8における、異常状態と正常状態とを示すグラフ。
実施形態8における、停止部によってアーム部の動作を制御するときのフローチャート。
実施形態8における、状態報知部によって異常状態の報知を制御するときのフローチャート。
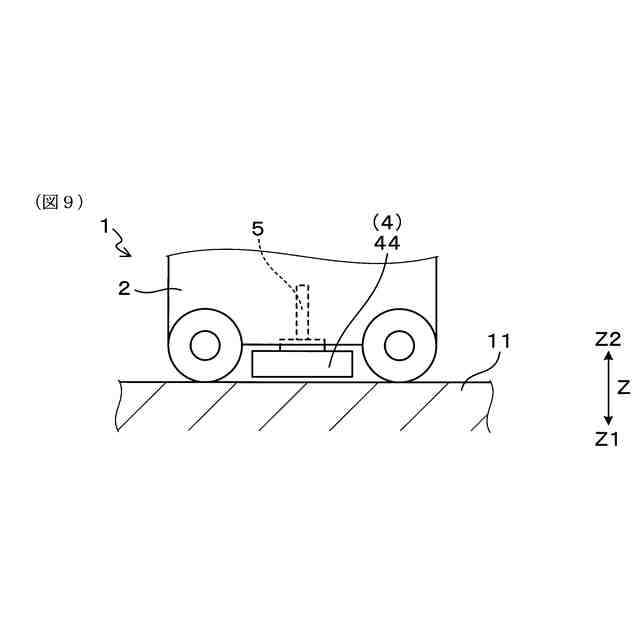
実施形態9における、マニピュレータの外観図。
実施形態10における、マニピュレータの外観図。
実施形態11における、マニピュレータの外観図。
実施形態12における、マニピュレータの外観図。
実施形態13における、作用部付近の外観図。
実施形態13における、被支持部に作用する下方向の力と、支持部に作用する上方向の力とを示す図。
実施形態14における、作用部付近の外観図。
実施形態14における、被支持部に作用する下方向の力と、支持部に作用する上方向の力とを示す図。
実施形態15における、マニピュレータの外観図。
実施形態16における、作用部付近の外観図。
実施形態17における、作用部付近の外観図。
実施形態18における、作用部付近の外観図。
【発明を実施するための形態】
【0010】
(実施形態1)
マニピュレータに係る実施形態について、図1、図2を参照して説明する。
本形態のマニピュレータ1は、図1、図2に示すごとく、走行体2と、走行体2に接続されたアーム部3と、を備える。アーム部3は、移動対象物10を保持する保持部31を有すると共に、走行体2に対して保持部31を移動させることができるよう構成されている。また、マニピュレータ1は、マニピュレータ1に下方向Z1の力F1を作用させる作用部4を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
7か月前
個人
ねじ締め装置
6か月前
日東精工株式会社
搬送装置
2か月前
中国電力株式会社
腰袋
25日前
個人
ペットボトル用蓋開け具。
7か月前
UTM株式会社
搬送装置
6か月前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
3か月前
川崎重工業株式会社
ハンド
4か月前
株式会社右川ゴム製造所
把持装置
2か月前
個人
ロボットシステム
6か月前
学校法人立命館
グリッパ
3か月前
学校法人立命館
ロボットハンド
3か月前
トヨタ自動車株式会社
関節機構
6か月前
川崎重工業株式会社
罫書用治具
6日前
トヨタ自動車株式会社
関節機構
6か月前
株式会社不二越
ロボット
6か月前
株式会社マキタ
動力工具
20日前
個人
プーリーキー抜き治具
3か月前
株式会社ダイヘン
搬送装置
24日前
株式会社ダイヘン
搬送装置
24日前
個人
作業台
6か月前
国立大学法人山形大学
二重関節機構
20日前
宮川工機株式会社
板状部品移動装置
1か月前
株式会社不二越
予測システム
4か月前
CKD株式会社
電動把持装置
1か月前
東京都公立大学法人
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
6か月前
小倉クラッチ株式会社
ロボットハンド
5か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
6か月前
工機ホールディングス株式会社
作業機
5か月前
株式会社越智工業所
ブレーカ用カバー
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ