TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024054794
公報種別
公開特許公報(A)
公開日
2024-04-17
出願番号
2022161274
出願日
2022-10-05
発明の名称
搬送ロボット
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20240410BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業精度の向上を図る。
【解決手段】本開示の一側面に係る搬送ロボットは、鉛直な第1軸線まわりに回転するように設けられ、第1軸線から遠ざかる方向に延びている第1アームと、鉛直な第2軸線まわりに回転するように第1アームに設けられ、第2軸線から遠ざかる方向に延びている第2アームと、鉛直な第3軸線まわりに回転するように第2アームに接続され、ワークを保持するワーク保持部を支持するように構成されたアーム先端部と、第3軸線から遠ざかるようにアーム先端部に延びる方向と、第3軸線との双方に交差する第1姿勢調節軸線まわりにワークを回転させるように構成された姿勢調節部と、を備える搬送ロボット。
【選択図】図1
特許請求の範囲
【請求項1】
鉛直な第1軸線まわりに回転するように設けられ、前記第1軸線から遠ざかる方向に延びている第1アームと、
鉛直な第2軸線まわりに回転するように前記第1アームに設けられ、前記第2軸線から遠ざかる方向に延びている第2アームと、
鉛直な第3軸線まわりに回転するように前記第2アームに接続され、ワークを保持するワーク保持部を支持するように構成されたアーム先端部と、
前記第3軸線から遠ざかるように前記アーム先端部に延びる方向と、前記第3軸線との双方に交差する第1姿勢調節軸線まわりに前記ワークを回転させるように構成された姿勢調節部と、を備える搬送ロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記姿勢調節部による前記第1姿勢調節軸線まわりの前記ワークの可動範囲は、±30°以内である、請求項1に記載の搬送ロボット。
【請求項3】
前記姿勢調節部は、前記第1姿勢調節軸線と前記第3軸線との双方に交差する第2姿勢調節軸線まわりに前記ワークを更に回転させるように構成されている、請求項1又は2に記載の搬送ロボット。
【請求項4】
前記姿勢調節部による前記第2姿勢調節軸線まわりの前記ワークの可動範囲は、±30°以内である、請求項3に記載の搬送ロボット。
【請求項5】
前記姿勢調節部は、前記第2アームと前記アーム先端部との間に設けられており、
前記姿勢調節部は、第4軸線まわりに前記アーム先端部を回転させる第1調節部と、第5軸線まわりに前記アーム先端部を回転させる第2調節部と、を有し、
前記第4軸線及び前記第5軸線は、前記第3軸線に交差する同一平面に含まれ、交点を有するように交差している、請求項3に記載の搬送ロボット。
【請求項6】
前記第4軸線と前記第2姿勢調節軸線とのなす角は、0°よりも大きく、且つ90°よりも小さく、
前記第5軸線と前記第2姿勢調節軸線とのなす角は、-90°よりも大きく、且つ0°よりも小さい、請求項5に記載の搬送ロボット。
【請求項7】
前記第4軸線は、前記第1姿勢調節軸線に相当し、
前記第5軸線は、前記第2姿勢調節軸線に相当する、請求項5に記載の搬送ロボット。
【請求項8】
所定位置に固定された基部を更に備え、
前記第1アームの基端部は、前記基部に設けられており、
前記姿勢調節部は、前記第2アームと前記アーム先端部との間に設けられており、
前記アーム先端部は、前記姿勢調節部に接続された昇降ベース部と、前記ワーク保持部を支持し、前記昇降ベース部が延びる方向に沿って移動するように前記昇降ベース部に設けられた可動部と、前記昇降ベース部が延びる方向に沿って前記可動部を駆動する直動駆動部と、を含む、請求項1又は2に記載の搬送ロボット。
【請求項9】
前記可動部は、前記ワーク保持部が前記アーム先端部の側方に配置されるように、前記ワーク保持部を支持可能である、請求項8に記載の搬送ロボット。
【請求項10】
前記昇降ベース部は、前記第3軸線とは離れた位置に配置された状態で、前記姿勢調節部を介して前記第2アームに接続されている、請求項9に記載の搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、搬送ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1には、ワークの保持、搬送、組立て、及び、検査等の作業で用いられる水平多関節ロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-163516号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、作業精度の向上に有用な搬送ロボットを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係る搬送ロボットは、鉛直な第1軸線まわりに回転するように設けられ、第1軸線から遠ざかる方向に延びている第1アームと、鉛直な第2軸線まわりに回転するように第1アームに設けられ、第2軸線から遠ざかる方向に延びている第2アームと、鉛直な第3軸線まわりに回転するように第2アームに接続され、ワークを保持するワーク保持部を支持するように構成されたアーム先端部と、第3軸線から遠ざかるようにアーム先端部に延びる方向と、第3軸線との双方に交差する第1姿勢調節軸線まわりにワークを回転させるように構成された姿勢調節部と、を備える。
【発明の効果】
【0006】
本開示によれば、作業精度の向上に有用な搬送ロボットが提供される。
【図面の簡単な説明】
【0007】
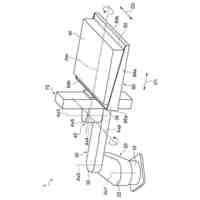
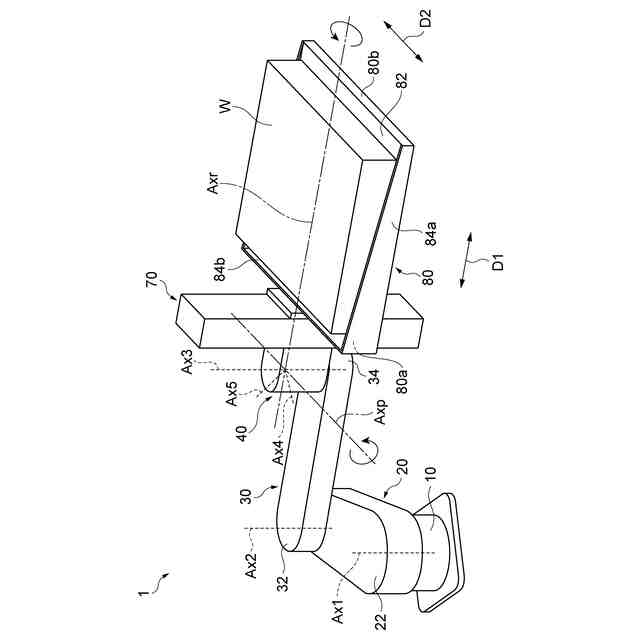
図1は、搬送ロボットの一例を模式的に示す斜視図である。
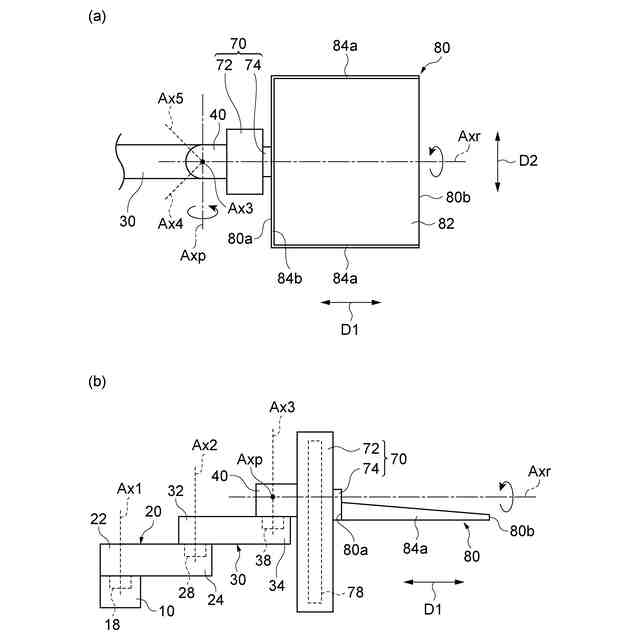
図2(a)は、搬送ロボットの一例を模式的に示す上面図である。図2(b)は、搬送ロボットの一例を模式的に示す側面図である。
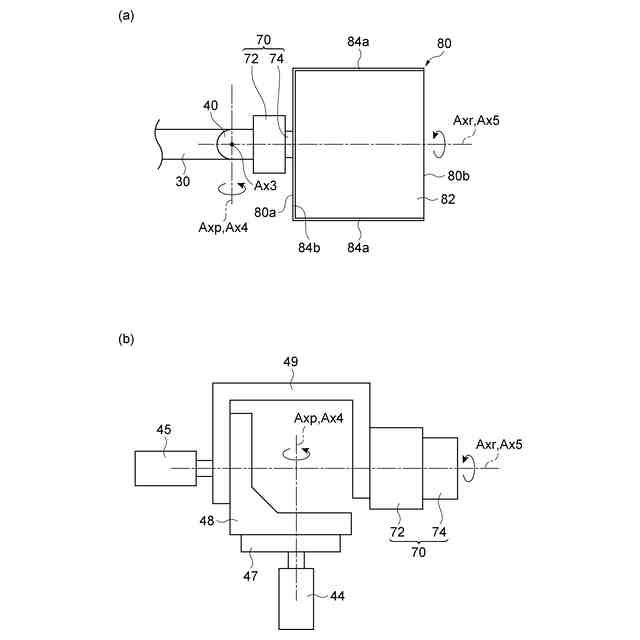
図3(a)及び図3(b)は、姿勢調節部及びその周囲の部材の一例を模式的に示す斜視図である。
図4(a)は、姿勢調節部及びその周囲の部材の一例を模式的に示す上面図である。図4(b)は、姿勢調節部による調節の一例を説明するための模式図である。
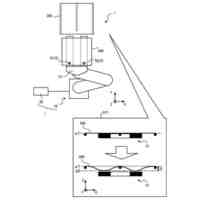
図5(a)は、搬送ロボットの一例を模式的に示す上面図である。図5(b)は、姿勢調節部による調節の一例を説明するための模式図である。
図6(a)及び図6(b)は、姿勢調節部及びその周囲の部材の一例を模式的に示す斜視図である。
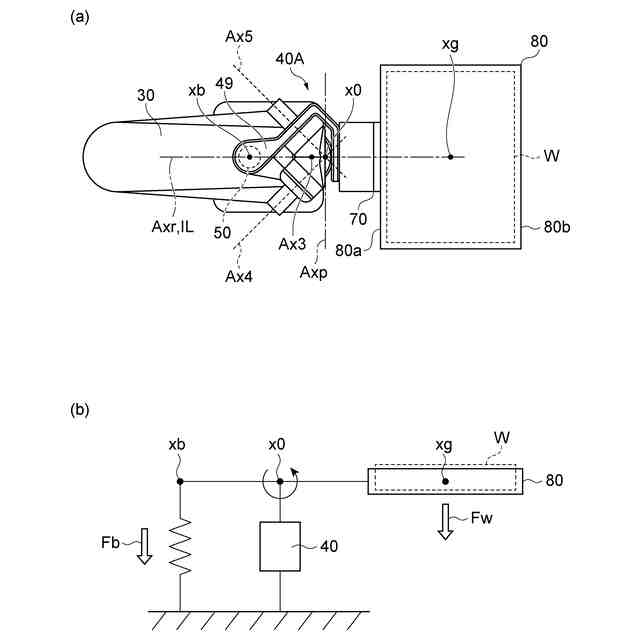
図7(a)は、姿勢調節部及びその周囲の部材の一例を模式的に示す上面図である。図7(b)は、バランサ部材の機能の一例を説明するための模式図である。
図8は、搬送ロボットの一例を模式的に示す側面図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しつつ説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。また、以下に示す実施形態では、「平行」、「直交」、「水平」あるいは「鉛直」といった表現を用いるが、厳密にこれらの状態を満たすことを要しない。すなわち、上記した各表現は、製造精度、設置精度、処理精度、検出精度、又は機械構造物の変形などによるずれを許容するものとする。
【0009】
図1は、搬送ロボットの構成を例示する斜視図である。図2(a)は、搬送ロボットの構成を例示する上面図(平面図)であり、図2(b)は、搬送ロボットの構成を例示する側面図である。図1に示される搬送ロボット1は、搬送対象物(以下、「ワークW」という。)を搬送する装置である。搬送ロボット1は、ワークWの搬送を含む作業の少なくとも一部を自動的に実行する。搬送ロボット1は、他のロボット等の装置又は作業員と協働して、ワークWに対する作業の少なくとも一部を実行してもよい。搬送ロボット1にはコントローラが接続されており、搬送ロボット1は、例えば、コントローラによって、ワークWを受け取って目標位置までワークWを搬送するように制御される。
【0010】
搬送ロボット1による搬送対象のワークWの種類は、特に限定されない。ワークWの重量は、300kg以上、450kg以上、又は、600kg以上であってもよい。すなわち、搬送ロボット1の可搬重量が、300kg以上、450kg以上、又は、600kg以上であってもよい。ワークWは、電気自動車の走行用のバッテリーモジュールを含んでもよい。ワークWは、単体のバッテリーモジュールであってもよく、1つにまとめて搬送される複数のバッテリーモジュールであってもよい。また、ワークWは、複数のバッテリーモジュールを一体化したバッテリーユニットであってもよい。搬送ロボット1は、複数のセルが上下に並ぶ棚にワークWを搬送(移載)してもよく、ワークWを取り付ける他のワークにおける取付位置まで、下方からワークWを持ち上げて搬送してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
搬送ロボット
17日前
株式会社安川電機
搬送システムおよび搬送方法
23日前
個人
釘抜き機
5か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
23日前
株式会社ツノダ
挟持工具
1か月前
株式会社ツノダ
挟持工具
2か月前
UTM株式会社
搬送装置
5か月前
株式会社右川ゴム製造所
把持装置
1か月前
川崎重工業株式会社
ハンド
2か月前
個人
ロボットシステム
4か月前
学校法人立命館
ロボットハンド
1か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
5か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
グリッパ
1か月前
個人
プーリーキー抜き治具
1か月前
個人
作業台
5か月前
株式会社不二越
予測システム
2か月前
CKD株式会社
電動把持装置
2日前
国立大学法人東北大学
剛性可変連結体
5か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社中村製作所
トルクドライバー
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社共和製作所
ロボット用アーム
10日前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ