TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024052005
公報種別
公開特許公報(A)
公開日
2024-04-11
出願番号
2022158432
出願日
2022-09-30
発明の名称
搬送システムおよび搬送方法
出願人
株式会社安川電機
代理人
弁理士法人酒井国際特許事務所
主分類
H01L
21/677 20060101AFI20240404BHJP(基本的電気素子)
要約
【課題】基板のたわみがあった場合であっても接触による基板の破損を防止すること。
【解決手段】実施形態に係る搬送システムは、ロボットと、コントローラとを備える。コントローラは、ロボットの動作を制御する。ロボットは、ハンドと昇降機構とを備える。ハンドは、基板を搬送する。昇降機構はハンドを昇降させる。ハンドは、保持している基板の下面との距離を検出可能なセンサを備える。コントローラは、記憶部と、検出部と、算出部とを備える。記憶部は、基板の載置位置における載置高さを含む載置情報を記憶する。検出部は、載置高さからハンドを下降させた場合に、基板がハンドから離れた離反高さを検出する。算出部は、載置高さと離反高さとの差分に基づいて基板のたわみ量を算出する。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットと、
前記ロボットの動作を制御するコントローラと
を備え、
前記ロボットは、
基板を搬送するハンドと、
前記ハンドを昇降させる昇降機構と
を備え、
前記ハンドは、
保持している前記基板の下面との距離を検出可能なセンサを備え、
前記コントローラは、
前記基板の載置位置における載置高さを含む載置情報を記憶する記憶部と、
前記載置高さから前記ハンドを下降させた場合に、当該基板が前記ハンドから離れた離反高さを検出する検出部と、
当該載置高さと当該離反高さとの差分に基づいて当該基板のたわみ量を算出する算出部と
を備えることを特徴とする搬送システム。
続きを表示(約 1,300 文字)
【請求項2】
前記ロボットは、
前記基板を多段に収容するカセットに対して前記基板の搬出入を行い、
前記載置情報は、
前記カセットの各段における載置高さを含むこと
を特徴とする請求項1に記載の搬送システム。
【請求項3】
前記基板は、
矩形のパネルであり、
前記カセットは、
該カセットの正面からみて前記基板の両端をそれぞれ支持する第1支持部および第2支持部と、
前記正面からみて前記基板を前記第1支持部および前記第2支持部の中間位置で支持する第3支持部と
を備え、
前記ハンドは、
前記第1支持部と前記第3支持部との間に挿入可能な第1延伸部と、前記第2支持部と前記第3支持部との間に挿入可能な第2延伸部とを少なくとも備え、
前記センサは、
前記第1延伸部および前記第2延伸部の基端側にそれぞれ設けられること
を特徴とする請求項2に記載の搬送システム。
【請求項4】
前記第3支持部は、
前記カセットの背面から前記正面へ向けて延伸するバーであり、上面視で、前記第1支持部および前記第2支持部の最前端よりも最前端が前記カセットの背面寄りにあること
を特徴とする請求項3に記載の搬送システム。
【請求項5】
前記センサは、
前記ハンドが前記カセットの内部における前記基板の受け渡し位置にある場合に、上面視で、前記第3支持部の最前端と、当該基板の最前端との間にあること
を特徴とする請求項4に記載の搬送システム。
【請求項6】
前記検出部は、
前記第1延伸部および前記第2延伸部の基端側にそれぞれ設けられた前記センサに前記基板における前記ハンド寄りの辺を検出させることによって、搬送対象となる当該基板の前記ハンドに対する向きを検出すること
を特徴とする請求項3に記載の搬送システム。
【請求項7】
前記ロボットは、
前記カセットへの前記基板の搬入を上段から下段へ向かう順序で行い、
前記コントローラは、
前記カセットに対して最後に搬入した前記基板のたわみ量に基づいて直下の段へのあらたな前記基板の搬入可否を判定する判定部
をさらに備えることを特徴とする請求項2に記載の搬送システム。
【請求項8】
前記センサは、
前記ハンドの基端側に設けられること
を特徴とする請求項1に記載の搬送システム。
【請求項9】
前記検出部は、
前記基板が前記ハンドによって保持されているか否かを前記センサによって検出すること
を特徴とする請求項1に記載の搬送システム。
【請求項10】
前記ロボットは、
前記基板の向きを整えるアライナに対して前記基板の搬出入を行い、
前記載置情報は、
前記アライナにおける載置高さを含むこと
を特徴とする請求項1に記載の搬送システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、搬送システムおよび搬送方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、ウェハやパネルといった基板を搬送するハンドを有するロボットを用いて、基板を収容するカセットとの間で基板の搬出入を行う搬送システムが知られている。
【0003】
たとえば、ロボットと、カセットに収容済のウェハとが接触する可能性の有無を、ウェハ搬送アームやカセットのセンサによって検出する技術が提案されている(たとえば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2007-234936号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記した従来技術には、カセットに収容済の基板のたわみがあった場合に、収容済の基板と、ロボットやあらたに搬入する基板とが接触する可能性がある。
【0006】
実施形態の一態様は、基板のたわみがあった場合であっても接触による基板の破損を防止することができる搬送システムおよび搬送方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
実施形態の一態様に係る搬送システムは、ロボットと、前記ロボットの動作を制御するコントローラとを備える。前記ロボットは、基板を搬送するハンドと、前記ハンドを昇降させる昇降機構とを備える。前記ハンドは、保持している前記基板の下面との距離を検出可能なセンサを備える。前記コントローラは、記憶部と、検出部と、算出部とを備える。記憶部は、前記基板の載置位置における載置高さを含む載置情報を記憶する。検出部は、前記載置高さから前記ハンドを下降させた場合に、当該基板が前記ハンドから離れた離反高さを検出する。算出部は、当該載置高さと当該離反高さとの差分に基づいて当該基板のたわみ量を算出する。
【発明の効果】
【0008】
実施形態の一態様によれば、基板のたわみがあった場合であっても接触による基板の破損を防止することができる搬送システムおよび搬送方法を提供することができる。
【図面の簡単な説明】
【0009】
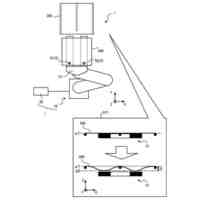
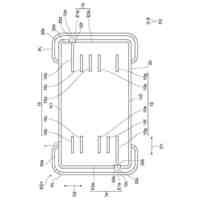
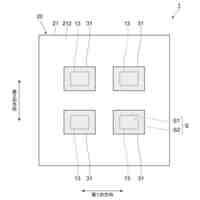
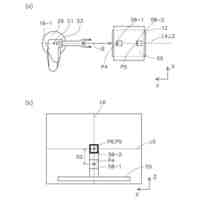
図1は、搬送システムの概要を示す上面模式図である。
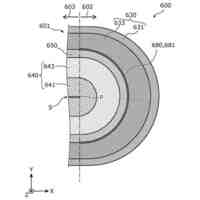
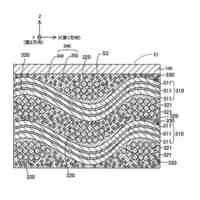
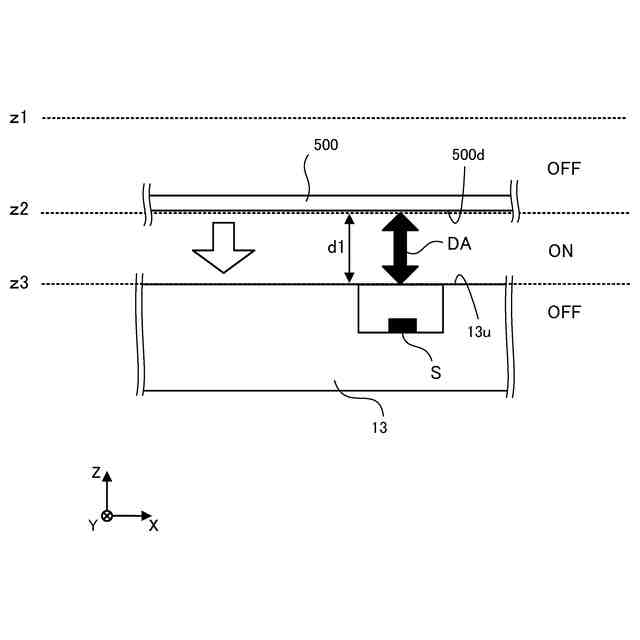
図2は、センサの検出範囲を示す側面模式図である。
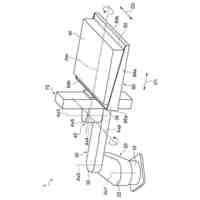
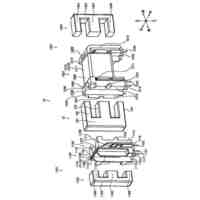
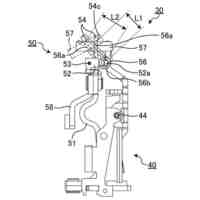
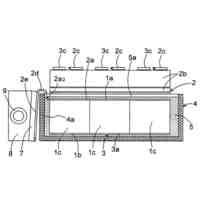
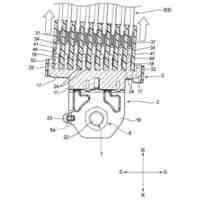
図3は、ロボットの斜視図である。
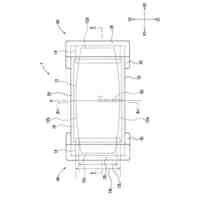
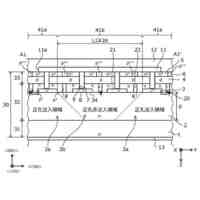
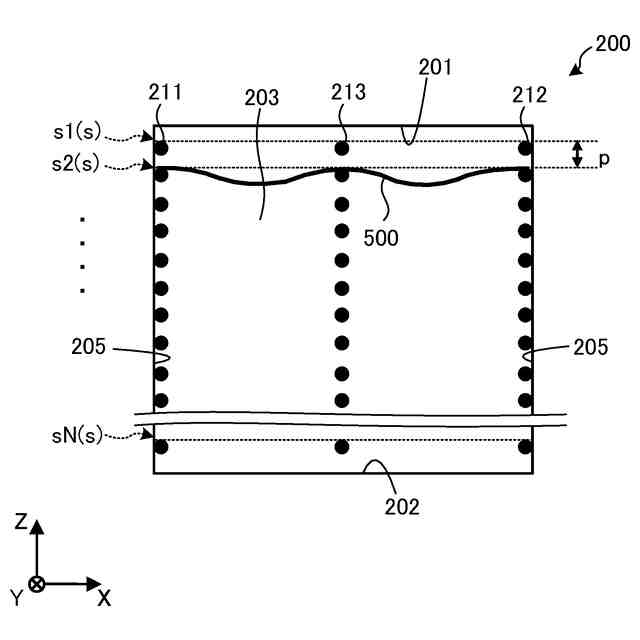
図4Aは、カセットの正面模式図である。
図4Bは、カセットの上面模式図である。
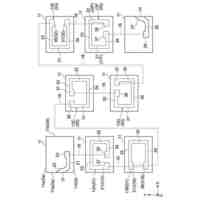
図5は、基板の搬入可否に関する判定処理の説明図である。
図6は、基板向き検出処理の説明図である。
図7は、搬送室の上面図である。
図8は、搬送システムのブロック図である。
図9は、たわみ量情報の説明図である。
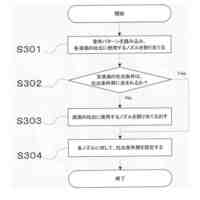
図10は、搬送高さ調整処理の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本願の開示する搬送システムおよび搬送方法を詳細に説明する。なお、以下に示す実施形態によりこの発明が限定されるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
搬送ロボット
17日前
株式会社安川電機
搬送システムおよび搬送方法
23日前
株式会社GSユアサ
蓄電素子
10日前
東京パーツ工業株式会社
コイル装置
11日前
三菱電機株式会社
回路遮断器
19日前
キヤノン株式会社
液滴吐出装置
9日前
NTN株式会社
圧粉磁心
9日前
トヨタ紡織株式会社
加湿器
9日前
太陽社電気株式会社
チップ抵抗器
3日前
住友電気工業株式会社
半導体装置
16日前
ローム株式会社
半導体装置
18日前
三菱電機株式会社
半導体装置
9日前
三菱電機株式会社
半導体装置
17日前
富士電機株式会社
半導体装置
4日前
富士電機株式会社
半導体装置
3日前
ヒロセ電機株式会社
同軸端子
17日前
日本特殊陶業株式会社
保持装置
18日前
日本特殊陶業株式会社
サセプタ
9日前
株式会社半導体エネルギー研究所
半導体装置
9日前
TDK株式会社
電子部品
17日前
日本特殊陶業株式会社
保持装置
18日前
ニチコン株式会社
フィルムコンデンサ
4日前
富士電機株式会社
炭化珪素半導体装置
2日前
ヒロセ電機株式会社
同軸電気コネクタ
3日前
ローム株式会社
窒化物半導体装置
3日前
住友電装株式会社
ワイヤハーネス
17日前
ヒロセ電機株式会社
電気コネクタ
18日前
ローム株式会社
窒化物半導体装置
4日前
株式会社デンソー
半導体装置
10日前
富士電機株式会社
半導体モジュール
16日前
ニチコン株式会社
コンデンサ
11日前
ORLIB株式会社
二次電池、及び飛行体
9日前
TDK株式会社
積層コイル部品
9日前
株式会社レゾナック
半導体装置
16日前
矢崎総業株式会社
コネクタ
10日前
ローツェ株式会社
位置教示装置および位置教示方法
9日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ