TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058215
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022165437
出願日
2022-10-14
発明の名称
位置教示装置および位置教示方法
出願人
ローツェ株式会社
代理人
主分類
H01L
21/677 20060101AFI20240418BHJP(基本的電気素子)
要約
【課題】カメラを用いて正確な位置教示を行うことが出来る位置教示装置と位置教示方法を提供する。
【解決手段】アームの先端に連結されるリスト部に支持される保持部によって基板を保持して、所定の搬送先まで前記基板を搬送する搬送ロボットに対して、前記所定の搬送先に設定される前記保持部の目標位置を教示する位置教示装置は、前記所定の搬送先に設置され、複数の検出点が設定されている位置教示治具と、前記保持部を支持するリスト部に搭載され、前記位置教示治具を撮影するカメラと、前記カメラから送信される画像データから前記保持部の前記目標位置と現在位置との変位量を求め、前記搬送ロボットの動作量を算出する教示部とを備え、前記複数の検出点は、前記保持部の進退方向に関して変位した位置に設定されており、前記教示部は、前記画像データに結像された前記複数の検出点の座標から前記動作量を算出する。
【選択図】図12
特許請求の範囲
【請求項1】
アームの先端に連結されるリスト部に支持される保持部によって基板を保持して、所定の搬送先まで前記基板を搬送する搬送ロボットに対して、前記所定の搬送先に設定される前記保持部の目標位置を教示する位置教示装置であって、
前記所定の搬送先に設置され、複数の検出点が設定されている位置教示治具と、
前記保持部を支持するリスト部に搭載され、前記位置教示治具を撮影するカメラと、
前記カメラから送信される画像データから前記保持部の前記目標位置と現在位置との変位量を求め、前記搬送ロボットの動作量を算出する教示部とを備え、
前記複数の検出点は、前記保持部の進退方向に関して変位した位置に設定されており、
前記教示部は、前記画像データに結像された前記複数の検出点の座標から前記動作量を算出することを特徴とする位置教示装置。
続きを表示(約 1,900 文字)
【請求項2】
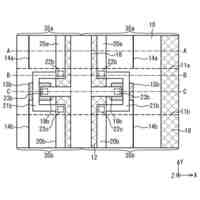
前記複数の検出点は、第1の位置決めマーカーの中心点と第2の位置決めマーカーの中心点とを含み、
前記第1の位置決めマーカーは前記搬送ロボットに対して近い位置に配置され、
前記第2の位置決めマーカーは前記搬送ロボットに対して遠い位置に配置され、
前記第2の位置決めマーカーは、前記第1の位置決めマーカーよりも高い位置に配置されることを特徴とする請求項1に記載の位置教示装置。
【請求項3】
前記保持部によって保持される前記基板の中心点は、水平面内において前記複数の検出点を結ぶ直線上に設定されることを特徴とする請求項1もしくは請求項2に記載の位置教示装置。
【請求項4】
前記複数の検出点は、第1の位置決めマーカーの中心点と、
第3の位置決めマーカーの中心点と第4の位置決めマーカーの中心点を結ぶ直線の中点とを含み、
前記第1の位置決めマーカーは前記搬送ロボットに対して近い位置に配置され、
前記第3の位置決めマーカーと前記第4の位置決めマーカーとは前記搬送ロボットに対して遠い位置に配置され、
前記第1の位置決めマーカーの中心点と前記第3の位置決めマーカーの中心点と前記第4の位置決めマーカーの中心点とは、
Z方向において同じ高さに配置されていることを特徴とする請求項1に記載の位置教示装置。
【請求項5】
前記複数の検出点は、
前記第3の位置決めマーカーの中心点と前記第4の位置決めマーカーの中心点を結ぶ直線の中点と、
第5の位置決めマーカーの中心点と第6の位置決めマーカーの中心点を結ぶ直線の中点とを含み、
前記第3の位置決めマーカーと前記第4の位置決めマーカーとは前記搬送ロボットに対して遠い位置に配置され、
前記第5の位置決めマーカーと前記第6の位置決めマーカーとは前記搬送ロボットに対して近い位置に配置され、
前記第3の位置決めマーカーの中心点と前記第4の位置決めマーカーの中心点と前記第5の位置決めマーカーの中心点と前記第6の位置決めマーカーの中心点とは、
Z方向において同じ高さに配置されていることを特徴とする請求項1に記載の位置教示装置。
【請求項6】
請求項1もしくは請求項2に記載の位置教示装置であって、
前記位置教示治具には、前記保持部を検出するセンサが備えられていることを特徴とする位置教示装置。
【請求項7】
請求項1もしくは請求項2に記載の位置教示装置であって、
前記位置教示治具には反射鏡が備えられており、
前記反射鏡は、前記カメラで前記保持部の所定の部位が撮影できる角度に調整されていることを特徴とする位置教示装置。
【請求項8】
請求項1もしくは請求項2に記載の位置教示装置であって、
前記位置教示治具には、
前記保持部と前記位置教示治具とのY方向における位置を検出するための一対の追加マーカーが備えられていることを特徴とする位置教示装置。
【請求項9】
アームの先端に連結されるリスト部に支持される保持部によって基板を保持して、所定の搬送先まで前記基板を搬送する搬送ロボットに対して、前記所定の搬送先に設定される前記保持部の目標位置を教示する位置教示方法であって、
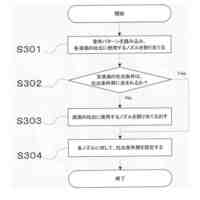
複数の検出点が設定されている位置教示治具を前記所定の搬送先に設置するステップと、
前記保持部を支持するリスト部に搭載されるカメラで前記位置教示治具を撮影するステップと、
前記カメラから送信される画像データから前記保持部の前記目標位置と現在位置との変位量を求めるステップと、
前記変位量から前記搬送ロボットの動作量を算出するステップとを含み、
前記複数の検出点を、前記保持部の進退方向に関して変位した位置に設定し、
前記動作量を算出するステップは、前記画像データに結像された前記複数の検出点の座標から前記動作量を算出する、ことを特徴とする位置教示方法。
【請求項10】
前記複数の検出点は、第1の位置決めマーカーの中心点と第2の位置決めマーカーの中心点とを含み、
前記第1の位置決めマーカーを前記搬送ロボットに対して近い位置に配置し、
前記第2の位置決めマーカーを前記搬送ロボットに対して遠い位置に配置し、
前記第2の位置決めマーカーを、前記第1の位置決めマーカーよりも高い位置に配置することを特徴とする請求項9に記載の位置教示方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
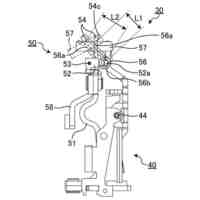
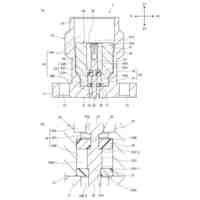
本発明は、アームの先端に設置された搬送部によって被搬送物を保持し、予め設定された搬送軌跡上を搬送する搬送装置、その搬送装置に搬送軌跡上の所定の目標位置を教示する位置教示方法、及び教示情報を得るための位置教示治具に関する。特に、半導体ウエハ等の薄物状の基板を被搬送物として搬送するための搬送装置、位置教示方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、半導体ウエハ、液晶パネル、有機ELパネル、太陽電池用パネル等の薄物状物の搬送装置に搬送位置を教示する作業は、作業者が被搬送物(搬送対象物)もしくは教示用の治具を搬送先(搬送ポート)に設置し、搬送装置を搬送位置まで誘導して、目視にて教示位置を確認していた。そのため、時間のかかる作業であり、作業者の熟練度により、精度に大きな差を生じやすいものであった。また、搬送装置によっては、作業者が目視確認するのが困難なものも多く、さらには搬送装置の可動範囲内に入っての作業もあり、危険な場合もあった。そこで近年では、円盤状の治具にカメラを取り付け、搬送先に配置される対象物を撮影して、その撮像から送装置に搬送位置を自動で教示する自動教示方法が提案されている。
【0003】
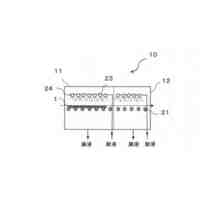
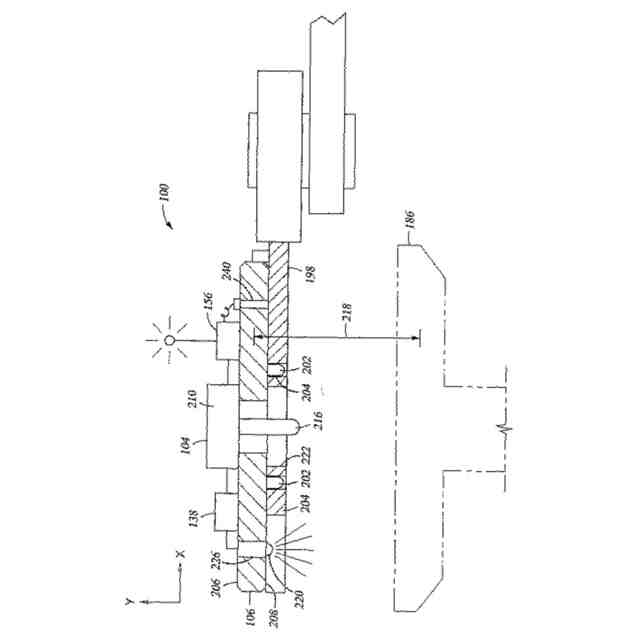
例えば、特許文献1では、CCDカメラ70の搭載された軌跡検出用ウェハ治具を搬送アーム51で保持させた状態でグリッド図上を移動させることで搬送アーム51の所定移動区間の移動軌跡を撮影する位置教示方法が開示されており、この撮影した移動軌跡に基づいて所定移動区間内にある搬送アーム51の搬送先である停止位置を教示する。また、特許文献2では、配置プレート106上に設置されているカメラ104と、電源138と送信機156とを備えるカメラアセンブリ治具が提案されている。このカメラアセンブリ100を転送ロボット196のエンドエフェクタ198で保持してエンドエフェクタ198の位置を校正する。
【先行技術文献】
【特許文献】
【0004】
特開2003-243479号公報
特開2006-522476号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のようなカメラを搭載した治具を使用することで、作業者が目視することが難しい場所であってものエンドエフェクタの目標位置への位置決めを実現することができるようになった。しかしながら、上記従来の方法ではカメラや電源、送信機といった重量のある治具を搬送ロボットのエンドエフェクタで保持する構成であるため、治具の重さでエンドエフェクタが撓んでしまい、エンドエフェクタの正確な現在位置を検出できない可能性があった。さらに、治具をエンドエフェクタに取り付ける際に、エンドエフェクタと治具との位置関係がズレてしまい、正確な位置教示が出来ないというトラブルも発生していた。
【課題を解決するための手段】
【0006】
本発明は上記問題点を解決するためになされたものであり、本発明の位置教示装置は、アームの先端に連結されるリスト部に支持される保持部によって基板を保持して、所定の搬送先まで前記基板を搬送する搬送ロボットに対して、前記所定の搬送先に設定される前記保持部の目標位置を教示する位置教示装置であって、前記所定の搬送先に設置され、複数の検出点が設定されている位置教示治具と、前記保持部を支持するリスト部に搭載され、前記位置教示治具を撮影するカメラと、前記カメラから送信される画像データから前記保持部の前記目標位置と現在位置との差を求め、前記搬送ロボットの動作量を算出する教示部とを備え、前記複数の検出点は、前記保持部の進退方向に関してそれぞれ変位した位置に設定されており、前記教示部は、前記画像データに結像された前記複数の検出点の座標から前記目標位置を教示することを特徴としている。
【0007】
上記構成とすることで、保持部の進退方向に関してそれぞれ変位した位置に設定された複数の検出点の座標から、保持部の目標位置に対する差を求めることが出来る。複数の検出点が搬送ロボットが備える保持部の進退方向に関してそれぞれ変位した位置に設定されているので、前方に配置される検出点と後方に配置される検出点との差を検出して、リスト部に支持される保持部とカメラとを差を打ち消す方向に移動させることで、保持部を目標位置に移動させることが出来る。
【0008】
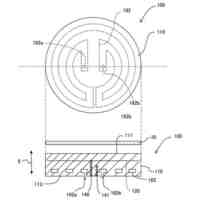
また、複数の検出点は、第1の位置決めマーカーの中心点と第2の位置決めマーカーの中心点とを含み、前記第1の位置決めマーカーは前記搬送ロボットに対して近い位置に配置され、前記第2の位置決めマーカーは前記搬送ロボットに対して遠い位置に配置され、前記第2の位置決めマーカーは、前記第1の位置決めマーカーよりも高い位置に配置される構成としても良い。上記構成とすることで、第1の位置決めマーカーの中心点のX方向の座標と第2の位置決めマーカーの中心点のX方向の座標が一致したとしても、第2の位置決めマーカーの中心点が第1の位置決めマーカーに隠れることは無いので、第2の位置決めマーカーの中心点の位置を正確に検出することが出来る。
【0009】
また、複数の検出点は、第1の位置決めマーカーの中心点と、第3の位置決めマーカーの中心点と前記第4の位置決めマーカーの中心点を結ぶ直線の中点とを含み、前記第1の位置決めマーカーは前記搬送ロボットに対して近い位置に配置され、前記第3の位置決めマーカーと前記第4の位置決めマーカーとは前記搬送ロボットに対して遠い位置に配置され、前記第1の位置決めマーカーの中心点と前記第2の位置決めマーカーの中心点と前記第3の位置決めマーカーの中心点とは、Z方向において同じ高さに配置される構成としても良い。さらに、複数の検出点は、第3の位置決めマーカーの中心点と前記第4の位置決めマーカーの中心点を結ぶ直線の中点と、第5の位置決めマーカーの中心点と前記第6の位置決めマーカーの中心点を結ぶ直線の中点とを含み、前記第3の位置決めマーカーと前記第4の位置決めマーカーとは前記搬送ロボットに対して遠い位置に配置され、前記第5の位置決めマーカーと前記第6の位置決めマーカーとは前記搬送ロボットに対して近い位置に配置され、前記第3の位置決めマーカーの中心点と前記第4の位置決めマーカーの中心点と前記第5の位置決めマーカーの中心点と前記第6の位置決めマーカーの中心点とは、Z方向において同じ高さに配置される構成としても良い。
【0010】
上記構成とすることで、各位置決めマーカーのZ方向の高さに差を設ける必要が無いので、各位置決めマーカー高さを低く設定することが出来る。これにより、高さ方向に余裕の無い搬送先であっても位置教示治具を使用した位置教示が可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ローム株式会社
半導体装置
24日前
東京パーツ工業株式会社
コイル装置
12日前
株式会社GSユアサ
蓄電素子
11日前
株式会社GSユアサ
蓄電設備
24日前
三菱電機株式会社
回路遮断器
20日前
NTN株式会社
圧粉磁心
10日前
キヤノン株式会社
液滴吐出装置
10日前
ローム株式会社
半導体装置
19日前
住友電気工業株式会社
半導体装置
17日前
シャープ株式会社
通信装置
20日前
トヨタ紡織株式会社
加湿器
10日前
太陽社電気株式会社
チップ抵抗器
4日前
株式会社東芝
半導体装置
20日前
三菱電機株式会社
半導体装置
18日前
富士電機株式会社
半導体装置
5日前
富士電機株式会社
半導体装置
4日前
三菱電機株式会社
半導体装置
10日前
ヒロセ電機株式会社
同軸端子
18日前
TDK株式会社
電子部品
24日前
ヒロセ電機株式会社
同軸電気コネクタ
4日前
TDK株式会社
電子部品
18日前
日本特殊陶業株式会社
サセプタ
10日前
TDK株式会社
電子部品
24日前
ニチコン株式会社
フィルムコンデンサ
5日前
日本特殊陶業株式会社
保持装置
19日前
富士電機株式会社
炭化珪素半導体装置
3日前
株式会社半導体エネルギー研究所
半導体装置
10日前
日本特殊陶業株式会社
保持装置
19日前
住友電装株式会社
ワイヤハーネス
18日前
東芝ライテック株式会社
電池装置
24日前
ローム株式会社
窒化物半導体装置
5日前
ヒロセ電機株式会社
電気コネクタ
19日前
ローム株式会社
窒化物半導体装置
4日前
ニチコン株式会社
コンデンサ
12日前
富士電機株式会社
半導体モジュール
17日前
TOPPANホールディングス株式会社
現像装置
20日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ