TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024047417
公報種別
公開特許公報(A)
公開日
2024-04-05
出願番号
2022153025
出願日
2022-09-26
発明の名称
屈曲構造体及びワッシャー
出願人
日本発條株式会社
代理人
個人
,
個人
主分類
B25J
18/06 20060101AFI20240329BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】端部部材を屈曲部に簡易且つ強固に取り付けることを可能とすることが可能な屈曲構造体を提供する。
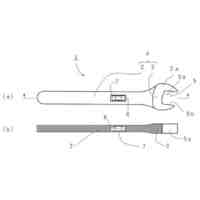
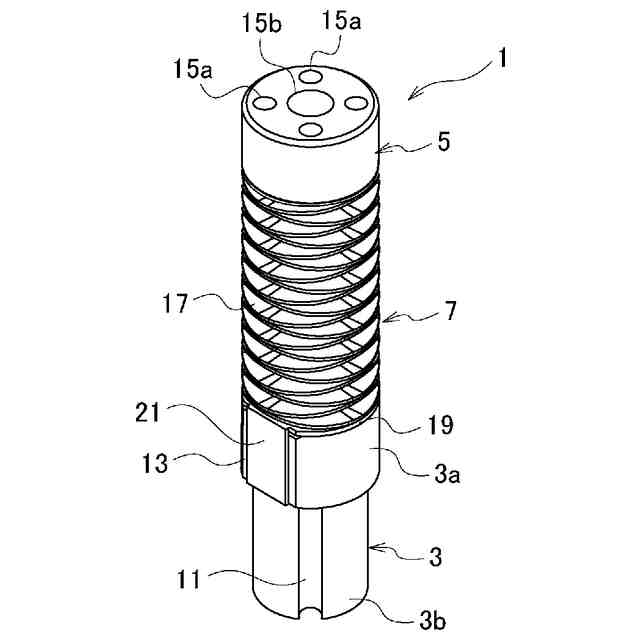
【解決手段】軸方向に対して弾性的に屈曲可能な屈曲部7と、屈曲部7の軸方向の端部に取り付けられる基部3と、屈曲部7の端部に軸方向に突設され、基部3に結合される結合アーム21と、を備える。
【選択図】 図1
特許請求の範囲
【請求項1】
軸方向に対して弾性的に屈曲可能な屈曲部と、
該屈曲部の前記軸方向の端部に取り付けられる端部部材と、
前記屈曲部の前記端部に前記軸方向に突設され前記端部部材に結合される結合アームと、
を備える屈曲構造体。
続きを表示(約 910 文字)
【請求項2】
請求項1の屈曲構造体であって、
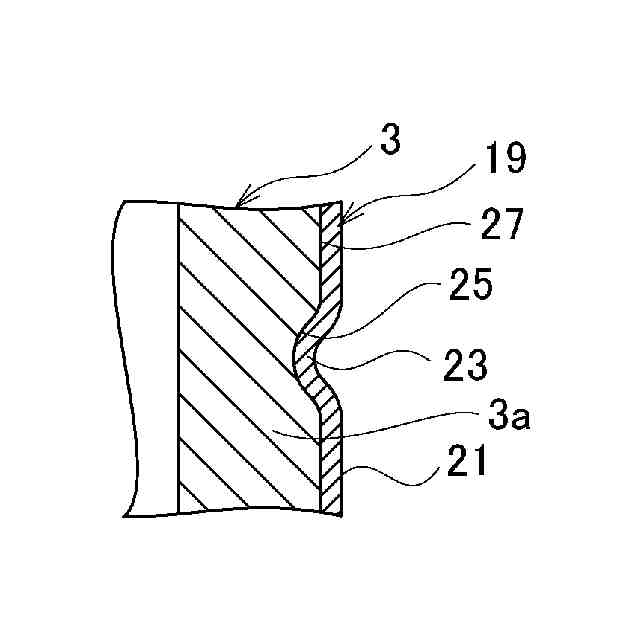
前記端部部材は、前記結合アームが固着される固着部を外周面上に有する、
屈曲構造体。
【請求項3】
請求項2の屈曲構造体であって、
前記結合アームは、板状であり、
前記固着部は、前記結合アームを沿わせる平面状である、
屈曲構造体。
【請求項4】
請求項3の屈曲構造体であって、
前記結合アームは、複数設けられ、それぞれ弾性を有して前記端部部材を保持し、
前記端部部材の固着部は、前記結合アームに応じて複数設けられ、それぞれ前記結合アームを弾接させた前記端部部材の保持状態で固着される、
屈曲構造体。
【請求項5】
請求項1の屈曲構造体であって、
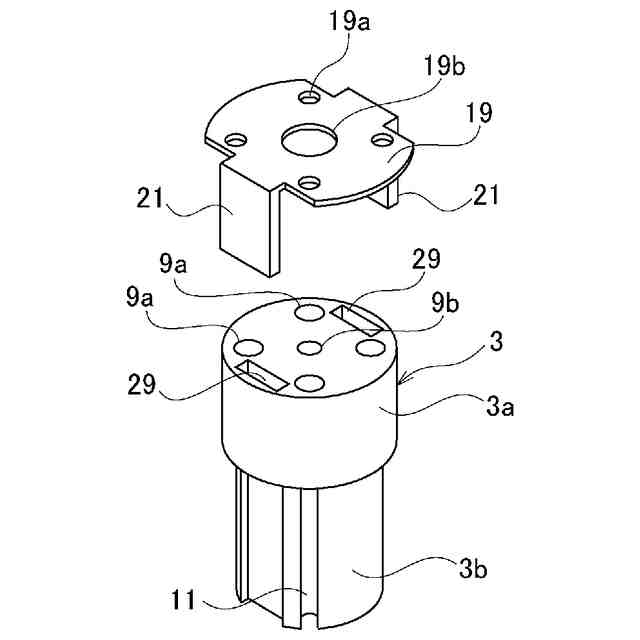
前記端部部材は、前記結合アームを挿入により係合させる係合孔を有する、
屈曲構造体。
【請求項6】
請求項1の屈曲構造体であって、
前記端部部材及び前記結合アームの一方は、凸部を有し、
前記端部部材及び前記結合アームの他方は、前記凸部を係合させる凹部を有する、
屈曲構造体。
【請求項7】
請求項1~6の何れか一項の屈曲構造体であって、
前記屈曲部の前記端部を構成する結合部材を備え、
前記結合アームは、前記結合部材に設けられた、
屈曲構造体。
【請求項8】
請求項7の屈曲構造体であって、
前記屈曲部は、前記軸方向に積層されると共に溶接によって積層状態が保持された複数のウェーブワッシャーを備え、
前記結合部材は、前記複数のウェーブワッシャーの端部に積層されると共に該積層状態が溶接によって保持されるワッシャーである、
屈曲構造体。
【請求項9】
軸方向に対して弾性的に屈曲可能な屈曲部の前記軸方向の端部に端部部材を取り付けるためのワッシャーであって、
前記軸方向に突設され前記端部部材の外周部に結合される結合アームを備えた、
ワッシャー。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットやマニピュレーター等の関節機能部に供される屈曲構造体及びこの屈曲構造体に用いられるワッシャーに関する。
続きを表示(約 890 文字)
【背景技術】
【0002】
従来の屈曲構造体としては、特許文献1のように、屈曲可能な屈曲部の軸方向の端部に端部部材を取り付けたものが知られている。
【0003】
屈曲部は、複数のウェーブワッシャーを積層すると共に、この積層状態がウェーブワッシャー相互間をレーザー溶接することで保持されて形成される。
【0004】
屈曲部には、端部部材が更に積層されて取り付けられる。端部部材の屈曲部への取付けでは、レーザー溶接を用いれば、簡易な工程で強固な結合が得ることができる。
【0005】
しかし、屈曲部と端部部材との間は、積層方向からレーザー光を照射することができないので、側方からレーザー光を照射する必要があり、十分な結合強度が得られなかった。
【0006】
こうした問題は、屈曲部が積層したウェーブワッシャーである場合だけでなく、コイルばねやベローズ等の他の屈曲部においても同様に生じていた。
【先行技術文献】
【特許文献】
【0007】
国際公開第WO2019/073860号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
解決しようとする問題点は、屈曲部の軸方向の端部に端部部材を簡易且つ強固に取り付けることができなかった点である。
【課題を解決するための手段】
【0009】
本発明は、軸方向に対して弾性的に屈曲可能な屈曲部と、該屈曲部の前記軸方向の端部に取り付けられる端部部材と、前記屈曲部の前記端部に前記軸方向に突設され前記端部部材に結合される結合アームと、を備える屈曲構造体を提供する。
【0010】
また、本発明は、軸方向に対して弾性的に屈曲可能な屈曲部の前記軸方向の端部に端部部材を取り付けるためのワッシャーであって、前記軸方向に突設され前記端部部材に結合される結合アームを備えた、ワッシャーを提供する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釘抜き機
5か月前
株式会社フジキン
レンチ
7か月前
個人
ねじ締め装置
4か月前
日東精工株式会社
搬送装置
29日前
個人
ペットボトル用蓋開け具。
6か月前
株式会社ツノダ
挟持工具
2か月前
株式会社ツノダ
挟持工具
1か月前
UTM株式会社
搬送装置
5か月前
川崎重工業株式会社
ハンド
2か月前
株式会社右川ゴム製造所
把持装置
1か月前
個人
ロボットシステム
4か月前
トヨタ自動車株式会社
関節機構
5か月前
学校法人立命館
グリッパ
1か月前
株式会社不二越
ロボット
6か月前
株式会社不二越
ロボット
4か月前
トヨタ自動車株式会社
関節機構
4か月前
学校法人立命館
ロボットハンド
2か月前
個人
作業台
5か月前
オムロン株式会社
ロボットハンド
6か月前
個人
プーリーキー抜き治具
1か月前
CKD株式会社
電動把持装置
8日前
川崎重工業株式会社
ロボット
7か月前
株式会社不二越
予測システム
2か月前
東京都公立大学法人
ロボットハンド
3日前
株式会社ダイヘン
情報処理装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
株式会社ダイヘン
画像生成装置
1か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
3か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
4か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
国立大学法人東北大学
剛性可変連結体
5か月前
小倉クラッチ株式会社
ロボットハンド
4か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ