TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024042318
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022146953
出願日
2022-09-15
発明の名称
運転支援装置、運転支援方法、及び運転支援プログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
G08G
1/16 20060101AFI20240321BHJP(信号)
要約
【目的】 自車両を駐車スポットから出庫させる際の安全性を向上させることができる運転支援装置を提供する。
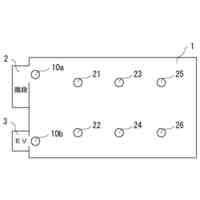
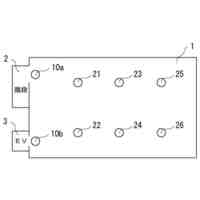
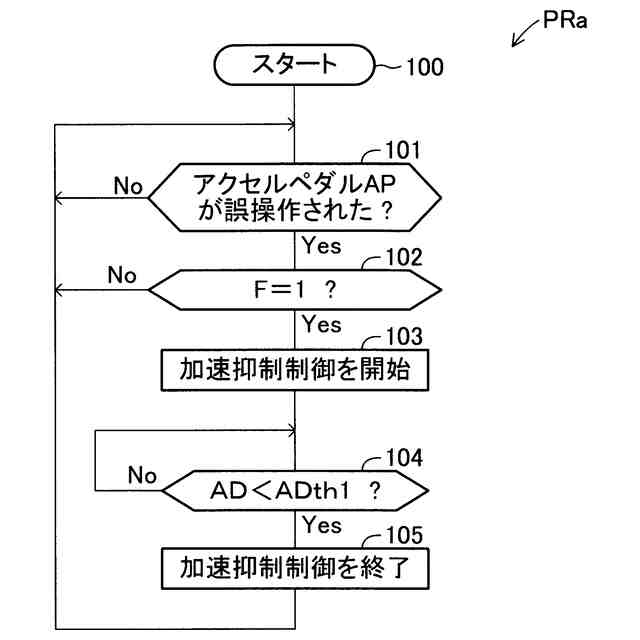
【解決手段】 運転支援装置1は、自車両が備える運転操作装置の操作に関する情報である操作情報を取得する操作センサと、自車両の走行状態に関する情報である車両情報を取得する車両センサと、運転者がアクセルペダルを誤って踏み込んだと判定した場合に自車両の加速を抑制する加速抑制制御を実行する制御装置と、を備える。前記制御装置は、自車両の始動後の速度、走行距離及び操舵角のうちの少なくとも1つに基づいて、出庫が完了したか否かを判定し、出庫が完了したと判定した場合、その後の加速抑制制御の実行を禁止する。
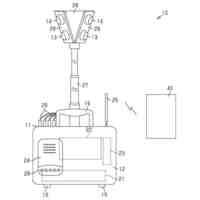
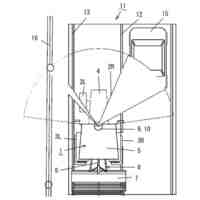
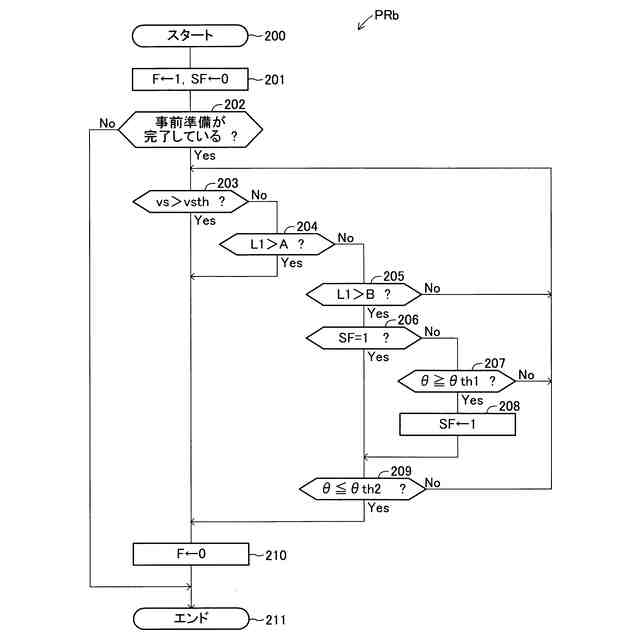
【選択図】 図2
特許請求の範囲
【請求項1】
自車両が備える運転操作装置の操作に関する情報である操作情報を取得する操作センサと、
自車両の走行状態に関する情報である車両情報を取得する車両センサと、
運転者がアクセルペダルを誤って踏み込んだと判定した場合に自車両の加速を抑制する加速抑制制御を実行する制御装置と、
を備えた運転支援装置であって、
前記制御装置は、
自車両の始動後の速度、走行距離及び操舵角のうちの少なくとも1つに基づいて、自車両が所定の駐車スポットから出庫を完了したか否かを判定し、出庫を完了したと判定した場合、加速抑制制御の実行を禁止する、
ように構成された、
運転支援装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記制御装置は、
自車両の始動後の速度が所定の速度を超えた場合、
自車両の始動後の走行距離が所定の第1距離を超えた場合、又は、
自車両の始動後の走行距離が前記第1距離よりも短い所定の第2距離を超えた時点から前記第1距離に達するまでの期間内に、自車両の操舵角に関する所定の条件が成立した場合、
出庫が完了したと判定する、
運転支援装置。
【請求項3】
請求項2に記載の運転支援装置において、
前記制御装置は、自車両が前記駐車スポットに駐車される可能性が高いと判断した時点における自車両の位置から自車両が前記駐車スポットに駐車されるまでの自車両の走行距離に基づいて、前記第1距離を設定する、運転支援装置。
【請求項4】
自車両が備える運転操作装置の操作に関する情報である操作情報を取得する操作情報取得ステップと、
自車両の走行状態に関する情報である車両情報を取得する車両情報取得ステップと、
運転者がアクセルペダルを誤って踏み込んだと判定した場合に自車両の加速を抑制する加速抑制制御を実行する制御ステップと、
を含む運転支援方法であって、
前記制御ステップは、
自車両の始動後の速度、走行距離及び操舵角のうちの少なくとも1つに基づいて、自車両が所定の駐車スポットから出庫を完了したか否かを判定し、出庫を完了したと判定した場合、加速抑制制御の実行を禁止するステップを含む、
ように構成された、
運転支援方法。
【請求項5】
自車両が備えるコンピュータに、
自車両が備える運転操作装置の操作に関する情報である操作情報を取得する操作情報取得ステップと、
自車両の走行状態に関する情報である車両情報を取得する車両情報取得ステップと、
運転者がアクセルペダルを誤って踏み込んだと判定した場合に自車両の加速を抑制する加速抑制制御を実行する制御ステップと、
を実行させる運転支援プログラムであって、
前記制御ステップは、
自車両の始動後の速度、走行距離及び操舵角のうちの少なくとも1つに基づいて、自車両が所定の駐車スポットから出庫を完了したか否かを判定し、出庫を完了したと判定した場合、加速抑制制御の実行を禁止するステップを含む、
ように構成された、
運転支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運転者が自車両を駐車スポットから出庫させる過程でアクセルペダルを誤って踏み込んだ可能性が高い場合に自車両の加速を抑制する運転支援装置、運転支援方法及び運転支援プログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
運転者がアクセルペダルを誤って踏み込んだ可能性が高い場合に自車両の加速を抑制する加速抑制機能を備えた運転支援装置が提案されている(例えば、下記特許文献を参照。)。特許文献1の運転支援装置(以下、「従来装置」と称呼する。)は、制御装置及びナビゲーションシステムを備える。制御装置は、ナビゲーションシステムから取得した地図データ及び自車両の位置データに基づいて、自車両が公道に位置しているか否かを判定する機能を有する。そして、制御装置は、自車両が公道以外の地点(例えば駐車スポットを含む駐車エリア)に位置し、自車両の速度が閾値を超え、且つアクセルペダルが踏み込まれた場合、制御装置は、自車両が加速されないように、駆動装置(スロットル弁)を制御する加速抑制制御を実行する。一方、制御装置は、自車両が公道に位置している場合には、加速抑制制御を実行しない。
【先行技術文献】
【特許文献】
【0003】
特開2003-137001号公報
【発明の概要】
【0004】
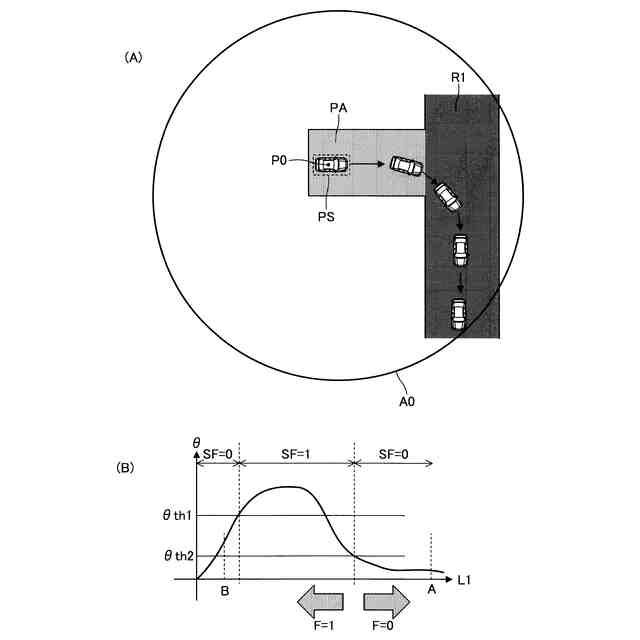
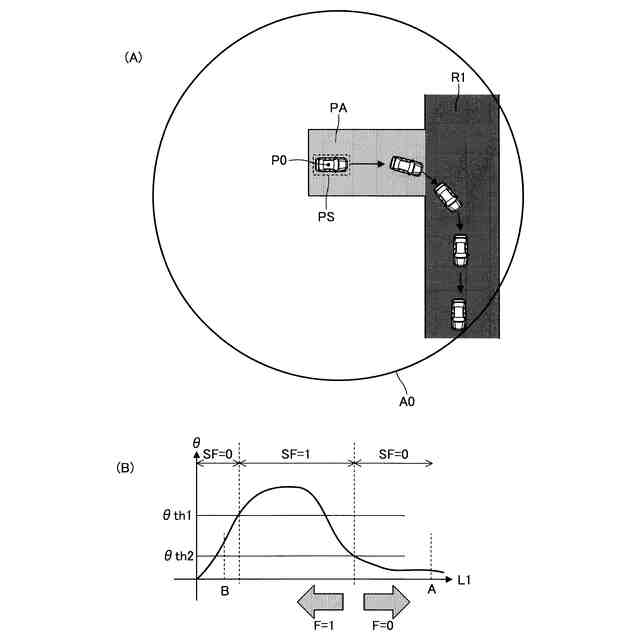
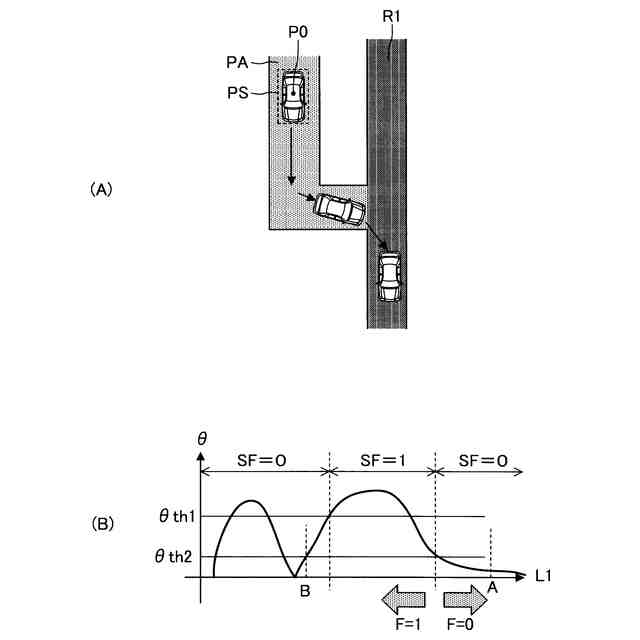
自車両が駐車スポットから出庫を開始し、公道に進入し始めた時点では自車両の向き(方角)が公道の延設方向とは異なる場合がある。この場合、運転者は、自車両が公道に進入し始めた後に、自車両の向きが公道の延設方向に一致するように自車両を低速で進行させつつ操舵する。このように、自車両が公道に進入したとしても、未だ出庫操作が完了していない場合がある。ここで、出庫操作とは、自車両が駐車スポットから出庫して公道に沿って走行を開始するまでの運転操作を言う。また、統計的に、運転者は、出庫操作中に誤ってアクセルペダルを踏み込んでしまう可能性が高い。上記の従来装置の制御装置は、自車両が公道に進入し始めた時点で自車両が公道に位置すると判断して加速抑制制御を実行しなくなるので、運転者が公道において出庫操作中に誤ってアクセルペダルを深く踏み込んでしまうと、自車両が急加速されてしまう虞がある。
【0005】
本発明の目的の一つは、自車両を駐車スポットから出庫させる際の安全性を向上させることができる運転支援装置を提供することである。
【0006】
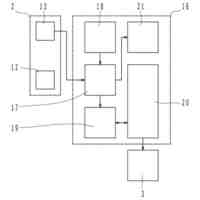
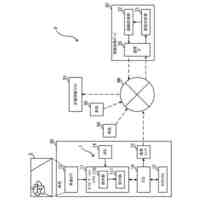
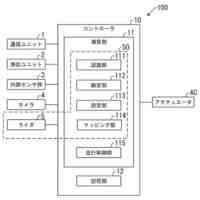
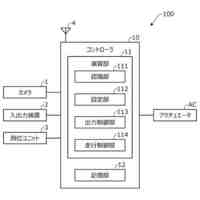
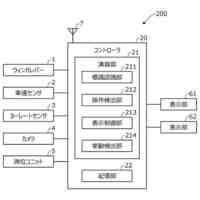
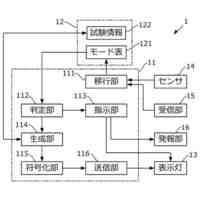
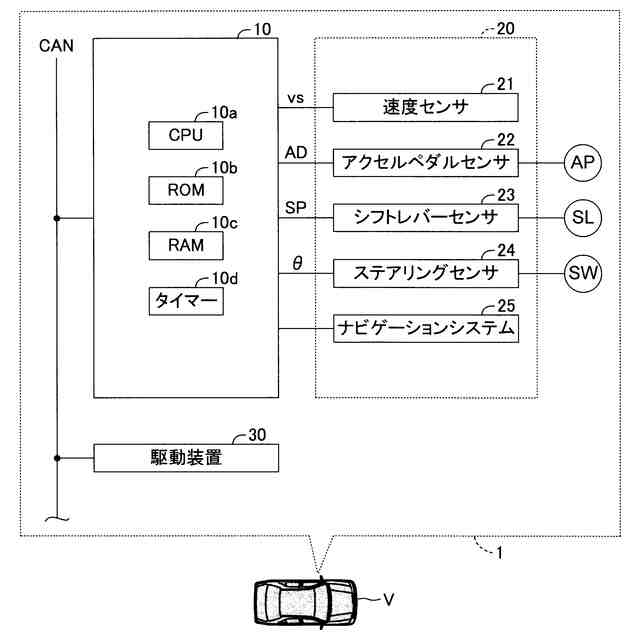
上記の目的を達成するために、本発明の運転支援装置(1)は、
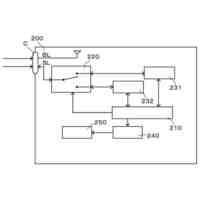
自車両(V)が備える運転操作装置(AP、SL、SW)の操作に関する情報である操作情報を取得する操作センサ(22、23、24)と、自車両の走行状態に関する情報である車両情報(vs)を取得する車両センサ(21)と、運転者がアクセルペダル(AP)を誤って踏み込んだと判定した場合に自車両の加速を抑制する加速抑制制御を実行する制御装置(10)と、を備える。
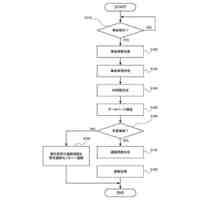
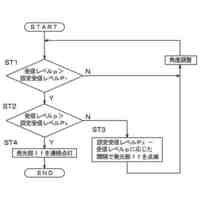
前記制御装置は、自車両の始動後(イグニッションON操作後)の速度(vs)、走行距離(L1)及び操舵角(θ)のうちの少なくとも1つに基づいて、自車両が所定の駐車スポットから出庫を完了したか否かを判定し、出庫を完了したと判定した場合、加速抑制制御の実行を禁止する。
【0007】
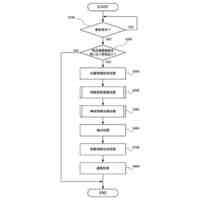
上記のように構成された運転支援装置の制御装置は、運転者が所定の駐車スポットにて自車両を始動させた後、出庫操作を完了するまでの期間内には、加速抑制制御を実行可能である。すなわち、運転者が駐車スポット、当該駐車スポットを含む駐車エリア及びその近傍の公道において出庫操作中に誤ってアクセルペダルを踏み込んだ場合に自車両の加速が抑制されるので、自車両の安全性が高い。また、出庫操作が完了した後には、制御装置は、加速抑制制御を実行不能である。従って、運転者は出庫操作完了後にアクセルペダルを踏み込むことにより、自車両を意図通りに加速させることができる。
【0008】
本発明の一態様に係る運転支援装置において、
前記制御装置は、
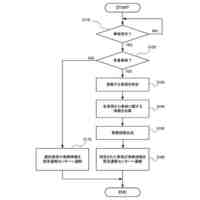
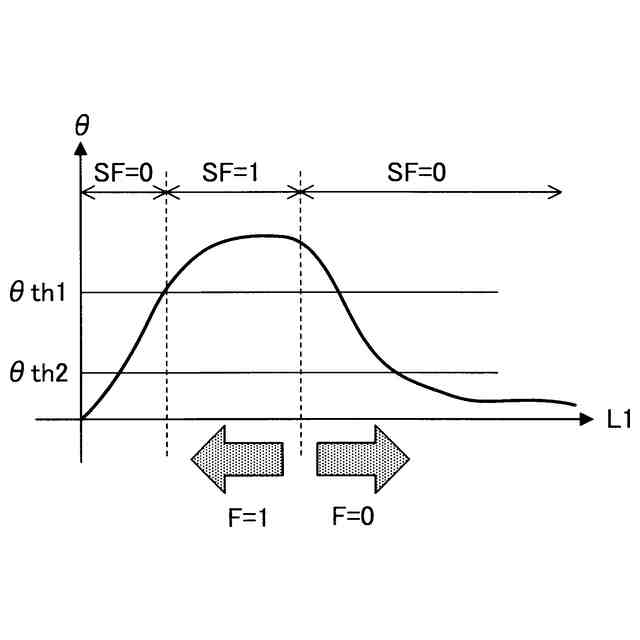
自車両の始動後の速度が所定の速度を超えた場合、自車両の始動後の走行距離(L1)が所定の第1距離(A)を超えた場合、又は、自車両の始動後の走行距離が前記第1距離よりも短い所定の第2距離(B)を超えた時点から前記第1距離に達するまでの期間内に、自車両の操舵角(θ)に関する所定の条件が成立した場合、出庫が完了したと判定する。これによれば、制御装置は、車両センサ及び操作センサから取得した情報に基づいて、比較的簡単に、出庫操作が完了したか否かを判定できる。
【0009】
本発明の他の態様に係る運転支援装置において、
前記制御装置は、自車両が前記駐車スポットに駐車される可能性が高いと判断した時点における自車両の位置から自車両が前記駐車スポットに駐車されるまでの自車両の走行距離(L0)に基づいて、前記第1距離を設定する。
【0010】
運転者が出庫操作を開始してから出庫操作を完了するまでに自車両が走行する距離(出庫時走行距離)は、駐車スポットを含む駐車エリアの構造(例えば通路の形状(曲率))、その近傍の公道の構造などによって異なる。また、出庫時走行距離は、自車両が駐車エリア近傍の公道から駐車スポットに入庫する際に走行した距離(入庫時走行距離)に関連している。そして、入庫時走行距離は、駐車エリアの構造、その近傍の公道の構造等を反映した距離に設定することができる。本態様では、第1距離が入庫時走行距離に基づいて設定される。すなわち、本態様によれば、出庫時走行距離の閾値としての第1距離が、駐車エリア及びその近傍の公道の構造に対応した適切な値に設定される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
非常放送システム
4日前
個人
はしごの道路標示
1か月前
個人
飛行体衝突回避装置
1か月前
個人
バス送迎支援システム
24日前
個人
自動操舵制御システム
1か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
日本精機株式会社
車両用計器装置
1か月前
株式会社知財事業研究所
信号機
1か月前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
表示灯
20日前
能美防災株式会社
警報器
1か月前
個人
配車システム
1か月前
株式会社アガタ
閉空間監視装置
21日前
ニッタン株式会社
感度試験装置
20日前
個人
配車システム
1か月前
ホーチキ株式会社
煙感知器
1か月前
トヨタ自動車株式会社
情報収集システム
14日前
株式会社大林組
異常検知システム
1か月前
株式会社京三製作所
車両検出装置
5日前
ニッタン株式会社
表示灯付発信機
1か月前
本田技研工業株式会社
外界認識装置
1か月前
井関農機株式会社
トラクタの制御システム
1か月前
トヨタ自動車株式会社
運転支援装置
18日前
個人
駐車場概要又は道路概況提供システム
2か月前
本田技研工業株式会社
運転支援装置
1か月前
本田技研工業株式会社
車両表示装置
1か月前
日本信号株式会社
路上車両検知装置
1か月前
ユニット株式会社
人感センサー音声警報器
20日前
竹中エンジニアリング株式会社
緊急呼出システム
27日前
竹中エンジニアリング株式会社
緊急呼出システム
27日前
矢崎エナジーシステム株式会社
警報器
1か月前
矢崎エナジーシステム株式会社
警報器
1か月前
中国電力株式会社
遠隔見守りシステム
1か月前
トヨタ自動車株式会社
車両情報配信装置
1か月前
能美防災株式会社
感知器
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ