TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024038934
公報種別
公開特許公報(A)
公開日
2024-03-21
出願番号
2022143311
出願日
2022-09-08
発明の名称
火災監視システム
出願人
能美防災株式会社
代理人
弁理士法人瑛彩知的財産事務所
主分類
G08B
17/12 20060101AFI20240313BHJP(信号)
要約
【課題】火災探査手段の赤外線カメラを雲台の旋回軸上に配置しないことで生じる、火源位置の計算誤差を低減する。
【解決手段】火災監視システムは、赤外線カメラと、当該赤外線カメラを略水平面内で旋回させる雲台とを備える火災探査手段と、火災探査手段の設置位置を示す値を、雲台の旋回軸から赤外線カメラまでの平面視における距離で補正して補正値を算出する補正手段と、算出した補正値と、火源撮像時の赤外線カメラの旋回角とに基づいて火源位置を算出する火源位置算出手段とを備える。
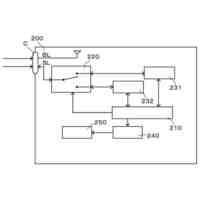
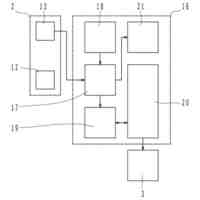
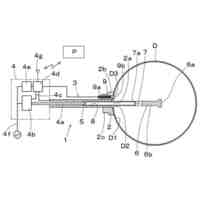
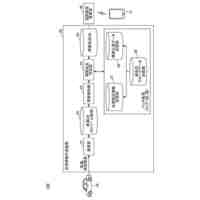
【選択図】図2
特許請求の範囲
【請求項1】
赤外線カメラと、当該赤外線カメラを略水平面内で旋回させる第1の雲台とを備える火災探査手段と、
前記火災探査手段の設置位置を示す値を、前記第1の雲台の旋回軸から前記赤外線カメラまでの平面視における距離で補正して補正値を算出する補正手段と、
前記算出した補正値と、火源撮像時の前記赤外線カメラの旋回角とに基づいて火源位置を算出する火源位置算出手段と
を備える火災監視システム。
続きを表示(約 460 文字)
【請求項2】
前記補正手段は、式(1)および(2)を用いて、前記火災探査手段の設置位置を示すx座標およびy座標の補正値を算出し、
X´=x+Acos(α)・・・(1)
Y´=y+Asin(α)・・・(2)
当該式(1)および(2)において、
X´、Y´は、前記x座標、前記y座標の補正値であり、
Aは、前記第1の雲台の旋回軸から前記赤外線カメラまでの平面視における距離を表し、
αは、火源撮像時の前記赤外線カメラの旋回角を表す
ことを特徴とする、請求項1に記載の火災監視システム。
【請求項3】
前記火災探査手段は、
可視カメラと、
前記第1の雲台に載置され、前記赤外線カメラと前記可視カメラを略垂直面内で旋回させる第2の雲台と
をさらに備え、
前記赤外線カメラと前記可視カメラは、前記第2の雲台に対して略水平方向に並べて取り付けられている
ことを特徴とする、請求項1または2に記載の火災監視システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、火災監視システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、アリーナやホール等の大きな利用空間をもつ施設における火災の監視と消火を行う火災検出消火システムとして、走査型火災検出装置と放水ノズル装置を組合わせたシステムが記載されている。このような火災検出消火システムにあっては、警戒区域を上部から見渡せる位置に、走査型の火災検出装置を設置し、光学的な水平走査と垂直走査によって警戒区域を二次元走査し、赤外線センサに対する入射光の受光信号が閾値レベルを越えたときに火源と判断する。制御装置は、火源を検出したときの火災検出装置の水平及び垂直走査角に基づき火源の座標位置を求め、放水ノズル装置の放水方向と放水距離を制御する。例えば放水ノズル装置は、俯仰角を固定した放水ノズルを水平回りに旋回自在に備えており、放水ノズルの旋回制御により火源に放水方向を設定し、放水距離は放水ノズルに供給する放水圧力によって設定する。
【0003】
この火災検出消火システムは、自動放水モードと手動放水モードを有する。自動放水モードは、放水銃の放水準備が完了した後に、監視員が手動放水操作スイッチを操作することなく、予め定めた自動放水条件を満足したときに自動的に放水を開始するモードである。一方、手動放水モードは、放水銃の放水準備が完了した後に、監視員が手動放水操作スイッチを操作して手動により放水を開始させるモードである。
【先行技術文献】
【特許文献】
【0004】
特開平10-258136号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この火災検出消火システムを構成する走査型の火災検出装置は、1台の赤外線カメラと2台の電動雲台で実現できる。具体的には当該装置は、1台の赤外線カメラと、当該赤外線カメラを水平旋回させる第1の電動雲台と、当該赤外線カメラを垂直旋回させる第2の電動雲台で実現できる。
【0006】
このような装置を構成する際、第1の電動雲台の旋回軸上に赤外線カメラを配置しない場合を想定する。言い換えると、第1の電動雲台の旋回軸からずれた位置に赤外線カメラを配置する場合を想定する。その場合、赤外線カメラの位置は、第1の電動雲台の旋回角によって変化する。仮に第1の電動雲台の旋回軸を当該装置の設置位置と定めていた場合、当該設定位置と赤外線カメラの位置のズレは、第1の電動雲台の旋回角によって変化することになる。
【0007】
火災検出装置の設置位置は火源位置の計算で使用される。そのため、当該設置位置と赤外線カメラの位置がずれると、火源位置の誤差が生じてしまう。
本発明はこのような事情に鑑みてなされたものであり、火災探査手段の赤外線カメラを雲台の旋回軸上に配置しないことで生じる、火源位置の計算誤差を低減することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明に係る火災監視システムは、赤外線カメラと、当該赤外線カメラを略水平面内で旋回させる雲台とを備える火災探査手段と、前記火災探査手段の設置位置を示す値を、前記雲台の旋回軸から前記赤外線カメラまでの平面視における距離で補正して補正値を算出する補正手段と、前記算出した補正値と、火源撮像時の前記赤外線カメラの旋回角とに基づいて火源位置を算出する火源位置算出手段とを備える。
【発明の効果】
【0009】
本発明によれば、火災探査手段の赤外線カメラを雲台の旋回軸上に配置しないことで生じる、火源位置の計算誤差を低減することができる。
【図面の簡単な説明】
【0010】
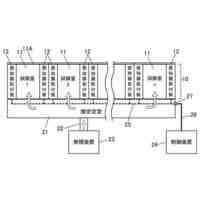
図1は、本放水砲システムの警戒範囲の一例を示す。
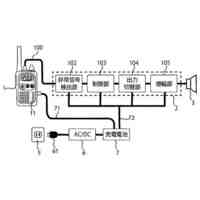
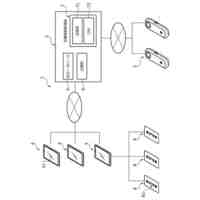
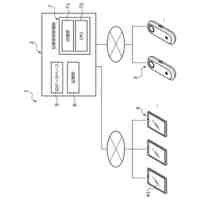
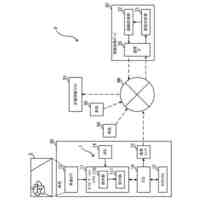
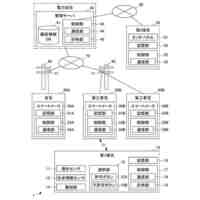
図2は、放水砲システムの系統の一例を示す。
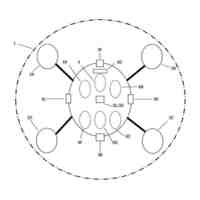
図3は、放水砲201の配置と防護範囲の例を示す。
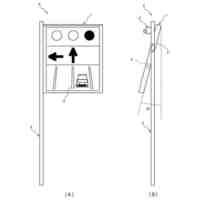
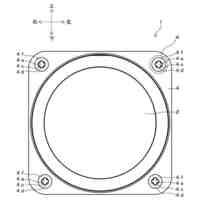
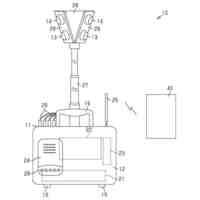
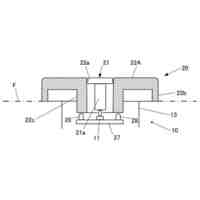
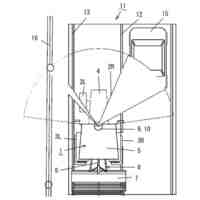
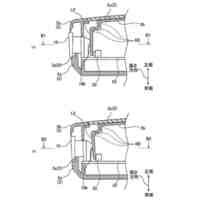
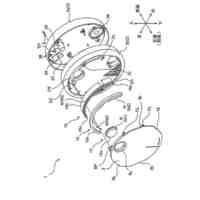
図4は、火災探査装置203の外観の一例を示す。
図5は、火災探査装置203の配置と警戒範囲の一例を示す。
図6は、火災探査装置203の配置と警戒範囲の一例を示す。
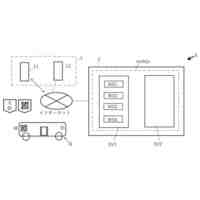
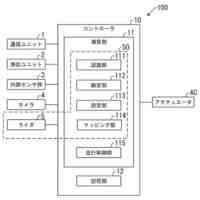
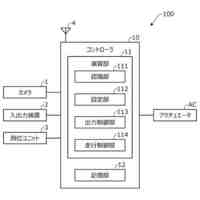
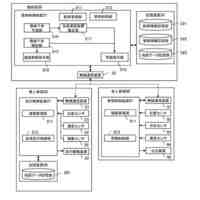
図7は、放水砲・火災探査制御盤205の機能構成の例を示す。
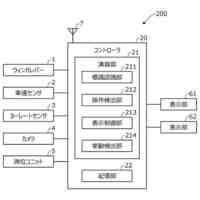
図8は、放水砲中央操作盤207の機能構成の例を示す。
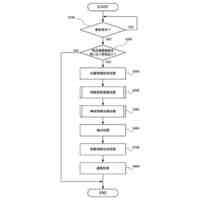
図9は、自動モードの動作シーケンス900の一例を示す。
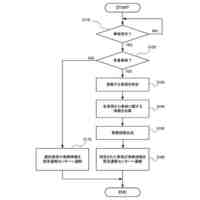
図10は、手動モードの動作シーケンス1000の一例を示す。
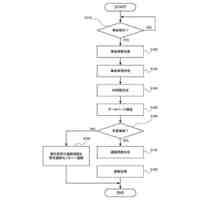
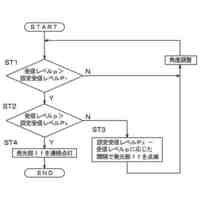
図11は、平常探査の動作フロー1100の一例を示す。
図12は、定点探査の動作フロー1200の一例を示す。
図13は、A探査の動作フロー1300の一例を示す。
図14は、B探査の動作フロー1400の一例を示す。
図15は、火源位置算出フロー1500の一例を示す。
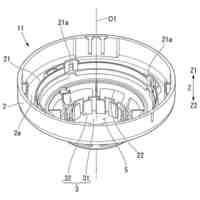
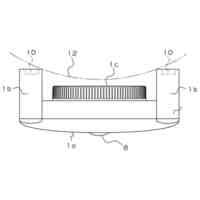
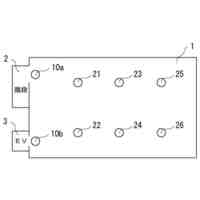
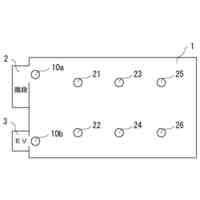
図16は、火災探査装置203の平面の一例を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
はしごの道路標示
1か月前
個人
非常放送システム
7日前
個人
飛行体衝突回避装置
1か月前
個人
バス送迎支援システム
27日前
個人
自動操舵制御システム
1か月前
株式会社SUBARU
車両
1か月前
日本精機株式会社
車両用計器装置
1か月前
株式会社SUBARU
車両
1か月前
株式会社知財事業研究所
信号機
1か月前
株式会社SUBARU
サーバ装置
1か月前
能美防災株式会社
警報器
1か月前
能美防災株式会社
表示灯
23日前
トヨタ自動車株式会社
制御装置
1日前
個人
配車システム
1か月前
株式会社アガタ
閉空間監視装置
24日前
個人
配車システム
1か月前
ニッタン株式会社
感度試験装置
23日前
トヨタ自動車株式会社
情報収集システム
17日前
ホーチキ株式会社
煙感知器
1か月前
株式会社京三製作所
車両検出装置
8日前
株式会社大林組
異常検知システム
1か月前
ニッタン株式会社
表示灯付発信機
1か月前
ユニット株式会社
人感センサー音声警報器
23日前
本田技研工業株式会社
外界認識装置
1か月前
井関農機株式会社
トラクタの制御システム
1か月前
本田技研工業株式会社
運転支援装置
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
竹中エンジニアリング株式会社
緊急呼出システム
1か月前
本田技研工業株式会社
車両表示装置
1か月前
日本信号株式会社
路上車両検知装置
1か月前
トヨタ自動車株式会社
運転支援装置
21日前
中国電力株式会社
遠隔見守りシステム
1か月前
矢崎エナジーシステム株式会社
警報器
1か月前
矢崎エナジーシステム株式会社
警報器
1か月前
日立建機株式会社
車両管理システム
21日前
トヨタ自動車株式会社
渋滞情報作成装置
9日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ