TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024038773
公報種別
公開特許公報(A)
公開日
2024-03-21
出願番号
2022143041
出願日
2022-09-08
発明の名称
無人搬送車
出願人
オークラ輸送機株式会社
代理人
個人
,
個人
主分類
B61B
13/00 20060101AFI20240313BHJP(鉄道)
要約
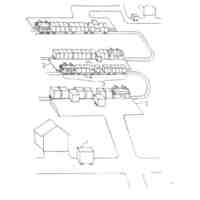
【課題】無人搬送車のカメラによる被牽引物のマーカーの認識を安定させることで、無人搬送車と被牽引物の連結の信頼性が向上した無人搬送車を提供する。
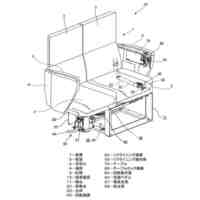
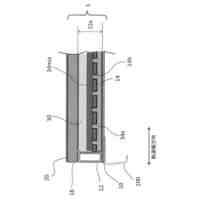
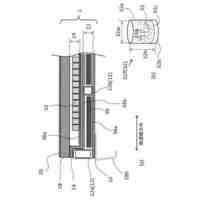
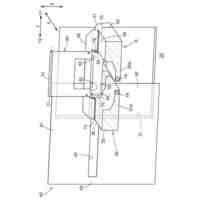
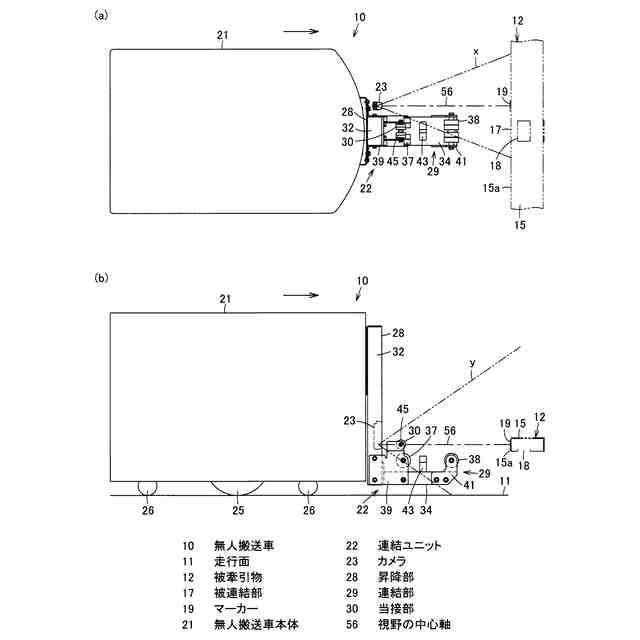
【解決手段】連結可能な被連結部17および位置認識用のマーカー19を有する被牽引物12を牽引する無人搬送車10である。無人搬送車10の無人搬送車本体21は、走行面11上を走行する。連結ユニット22は、無人搬送車本体21から外側に突出され、被牽引物12の被連結部17に着脱可能に連結される。カメラ23は、視野の中心軸56を水平方向とするとともに、視野の中心軸56上にマーカー19が位置する高さに配設され、マーカー19を認識する。マーカー処理部は、カメラ23が認識したマーカー19から、無人搬送車本体21と被牽引物12との相対的な位置関係を推定する。
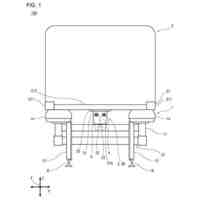
【選択図】図1
特許請求の範囲
【請求項1】
連結可能な被連結部および位置認識用のマーカーを有する被牽引物を牽引する無人搬送車であって、
走行面上を走行する無人搬送車本体と、
前記無人搬送車本体から外側に突出され、前記被牽引物の前記被連結部に着脱可能に連結される連結ユニットと、
視野の中心軸を水平方向とするとともに、前記視野の中心軸上に前記マーカーが位置する高さに配設され、前記マーカーを認識するカメラと、
前記カメラが認識した前記マーカーから、前記無人搬送車本体と前記被牽引物との相対的な位置関係を推定するマーカー処理部と
を備えることを特徴とする無人搬送車。
続きを表示(約 820 文字)
【請求項2】
前記カメラは、前記連結ユニットが前記被牽引物の前記被連結部に連結される際の連結前、連結途中、連結完了後に亘って前記マーカーを認識し続ける
ことを特徴とする請求項1記載の無人搬送車。
【請求項3】
前記連結ユニットは、
前記カメラの前記視野の中心軸と同じ高さに配置され、前記無人搬送車の走行により前記連結ユニットを前記被牽引物に接近させる際に前記被牽引物と当接して前記連結ユニットに対して前記被連結部を位置決めする当接部と、
前記連結ユニットに対して位置決めされた前記被連結部に対して動作することで前記被連結部と連結する連結部とを有し、
前記カメラの視野は、前記当接部が被連結部に当接する前から前記連結部が前記被連結部に連結するまでの間、前記マーカーを認識し続ける
ことを特徴とする請求項1記載の無人搬送車。
【請求項4】
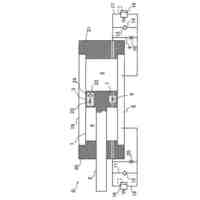
前記連結ユニットは、前記無人搬送車本体に対して昇降する昇降部と、この昇降部に設けられ、前記昇降部の下降位置で前記無人搬送車本体の走行により前記被牽引物の前記被連結部の下方に進入し、前記昇降部の上昇により前記被牽引物の前記被連結部に下方から連結される連結部と、前記無人搬送車本体の走行時に前記被牽引物の前記被連結部と当接可能とする当接部とを有し、
前記当接部は、前記昇降部の下降位置で、前記カメラの前記視野の中心軸と前記マーカーとの結ぶ直線上の高さと同じ高さに配置される
ことを特徴とする請求項1記載の無人搬送車。
【請求項5】
前記カメラは、前記無人搬送車本体の側面から窪んだ凹面に設けられている
ことを特徴とする請求項1記載の無人搬送車。
【請求項6】
前記カメラは、水平方向の視野角よりも垂直方向の視野角が大きい
ことを特徴とする請求項1記載の無人搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被牽引物を牽引する無人搬送車に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、例えば下記の特許文献1に記載されているように、被牽引物と連結することにより被牽引物を牽引する無人搬送車が知られている。
【0003】
このような無人搬送車では、例えば下記の特許文献2に記載されているように、無人搬送車に設置されたカメラにより被牽引物が有するマーカーを認識し、認識したマーカーから取得した無人搬送車と被牽引物との相対的な位置関係情報を使用することで、無人搬送車と被牽引物を連結することが可能となる。
【先行技術文献】
【特許文献】
【0004】
特許第6629436号公報
特開2020-17170号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の無人搬送車では、連結を実行する際に、無人搬送車のカメラがマーカーを安定して認識することが要請されている。
【0006】
本発明は、無人搬送車のカメラによる被牽引物のマーカーの認識を安定させることで、無人搬送車と被牽引物の連結の信頼性が向上した無人搬送車を提供することにある。
【課題を解決するための手段】
【0007】
本発明の無人搬送車は、連結可能な被連結部および位置認識用のマーカーを有する被牽引物を牽引する無人搬送車であって、走行面上を走行する無人搬送車本体と、前記無人搬送車本体から外側に突出され、前記被牽引物の前記被連結部に着脱可能に連結される連結ユニットと、視野の中心軸を水平方向とするとともに、前記視野の中心軸上に前記マーカーが位置する高さに配設され、前記マーカーを認識するカメラと、前記カメラが認識した前記マーカーから、前記無人搬送車本体と前記被牽引物との相対的な位置関係を推定するマーカー処理部とを備える。
【発明の効果】
【0008】
本発明の無人搬送車によれば、無人搬送車のカメラによる被牽引物のマーカーの認識を安定させることで、無人搬送車と被牽引物の連結の信頼性を向上できる。
【図面の簡単な説明】
【0009】
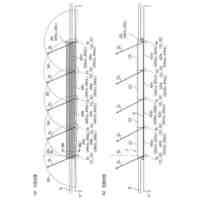
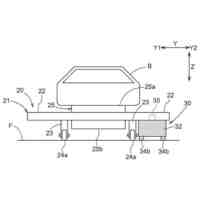
本発明の一実施の形態を示す無人搬送車と被牽引物の連結前を示し、(a)は平面図、(b)は側面図である。
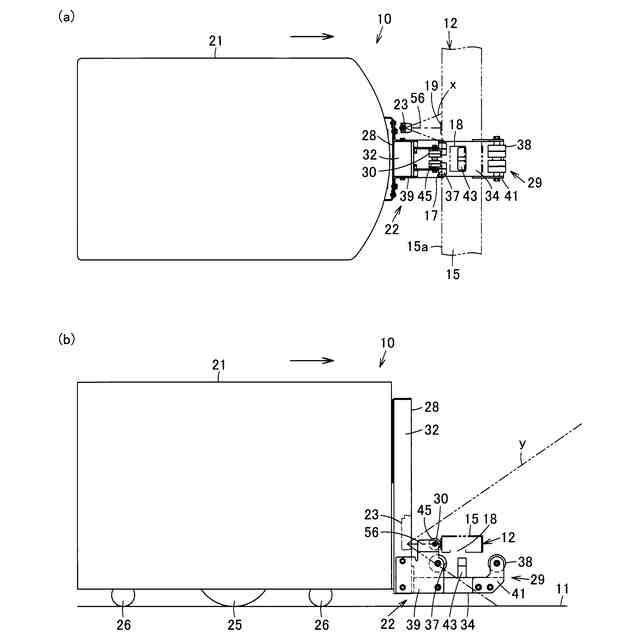
同上無人搬送車と被牽引物の連結途中を示し、(a)は平面図、(b)は側面図である。
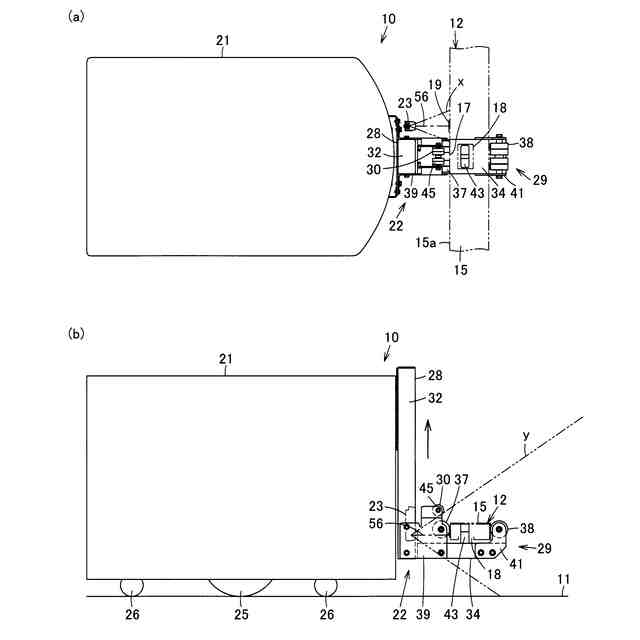
同上無人搬送車と被牽引物の連結完了後を示し、(a)は平面図、(b)は側面図である。
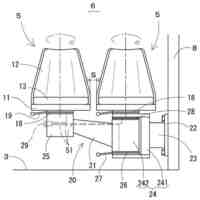
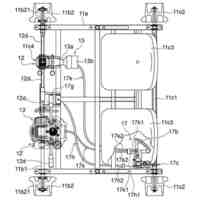
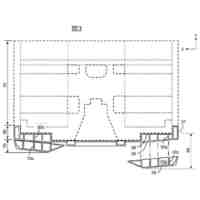
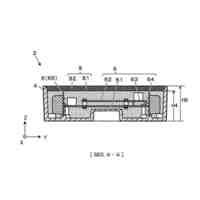
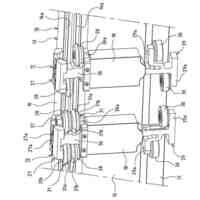
同上無人搬送車の連結ユニットおよびカメラの斜視図である。
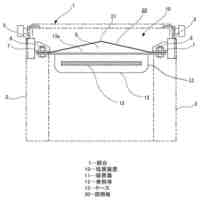
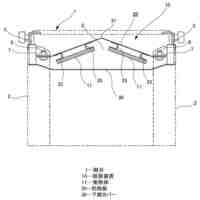
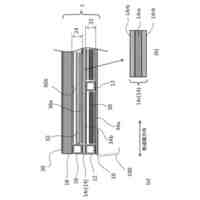
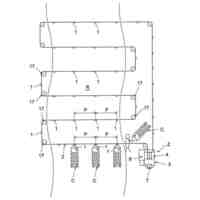
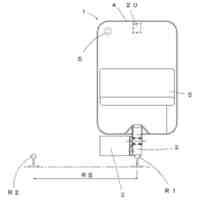
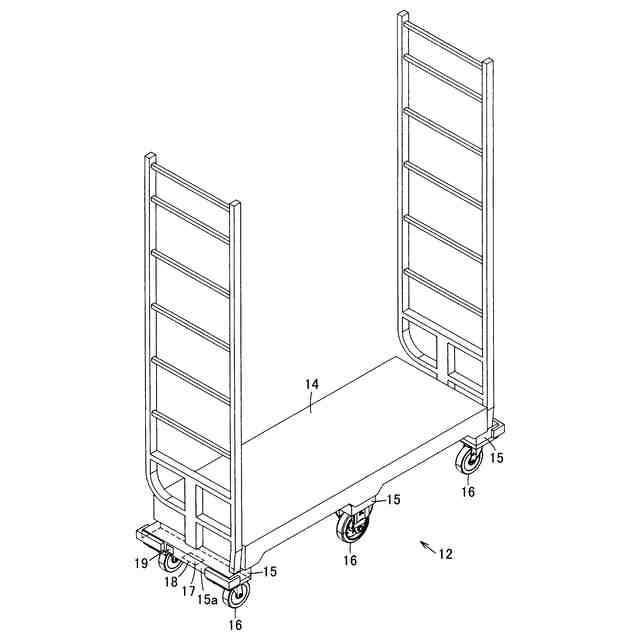
同上無人搬送車で牽引する被牽引物の斜視図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施の形態を、図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
コンテナ輸送システム
6か月前
東光産業株式会社
電動台車
8か月前
日本信号株式会社
検査装置
2か月前
コイト電工株式会社
暖房装置
6か月前
株式会社新陽社
発車標
6か月前
コイト電工株式会社
座席装置
8か月前
コイト電工株式会社
暖房装置
6か月前
日本車輌製造株式会社
鉄道車両
6か月前
日本車輌製造株式会社
鉄道車両
6か月前
富士電機株式会社
戸閉装置
9か月前
近畿車輌株式会社
鉄道車両の床構造
3か月前
株式会社ロッソ
移動体案内システム
9か月前
保線機器整備株式会社
保線用カート
1か月前
カヤバ株式会社
鉄道車両用制振装置
6か月前
近畿車輌株式会社
鉄道車両の床構造
3か月前
川崎車両株式会社
鉄道車両用パネル
24日前
近畿車輌株式会社
鉄道車両の床構造
3か月前
オムロン株式会社
転落検知システム
10か月前
カヤバ株式会社
鉄道車両用制振装置
2か月前
日本信号株式会社
踏切道監視システム
3か月前
株式会社日立製作所
鉄道車両
9か月前
株式会社ダイフク
搬送設備
5か月前
株式会社京三製作所
地上子
10か月前
株式会社ダイフク
搬送設備
8か月前
前川鉄工株式会社
ロープ駆動装置
4か月前
シャープ株式会社
表示装置
4か月前
ナブテスコ株式会社
ホームドア装置
5か月前
ナブテスコ株式会社
ホームドア装置
6か月前
ナブテスコ株式会社
ホームドア装置
6か月前
ナブテスコ株式会社
ホームドア装置
6か月前
日本信号株式会社
列車制御システム
7か月前
株式会社フジキカイ
リニア搬送装置
5か月前
株式会社 空スペース
跨座式モノレールシステム
1か月前
日本車輌製造株式会社
長尺用無人搬送台車
5か月前
日本製鉄株式会社
鉄道車両
17日前
株式会社京三製作所
ホーム柵
10か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ